TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025043483
公報種別
公開特許公報(A)
公開日
2025-04-01
出願番号
2023150789
出願日
2023-09-19
発明の名称
基板処理装置および基板処理方法
出願人
株式会社SCREENホールディングス
代理人
個人
主分類
H01L
21/677 20060101AFI20250325BHJP(基本的電気素子)
要約
【課題】透明な基板のエッジの位置を適切に検出できる基板処理装置および基板処理方法を提供する。
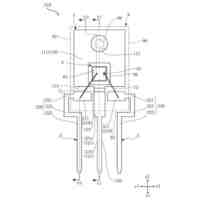
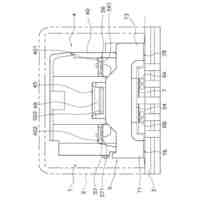
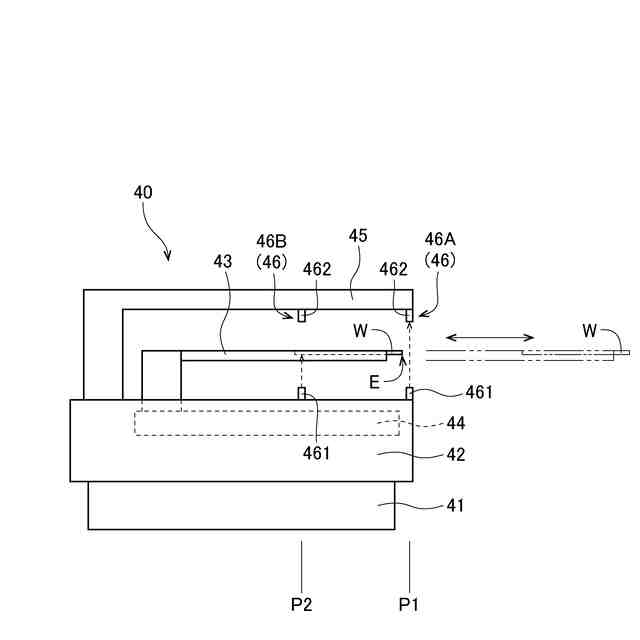
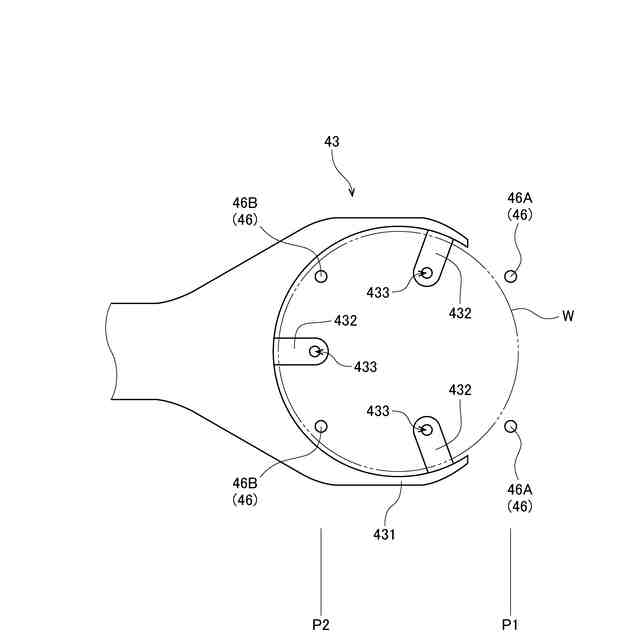
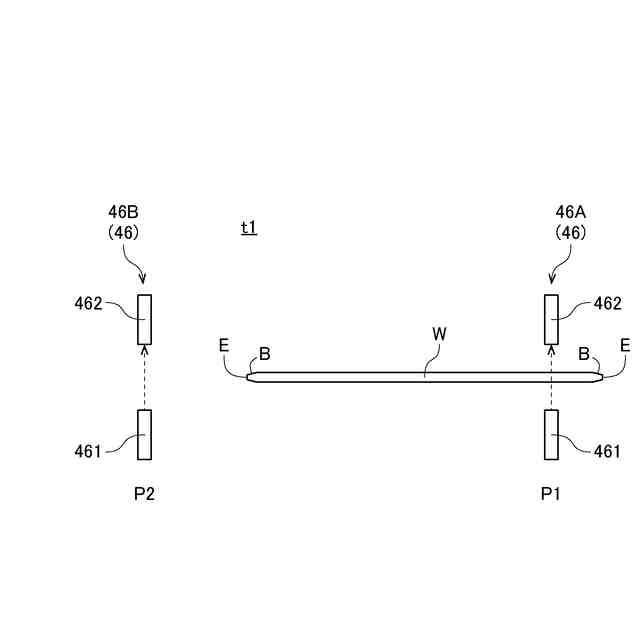
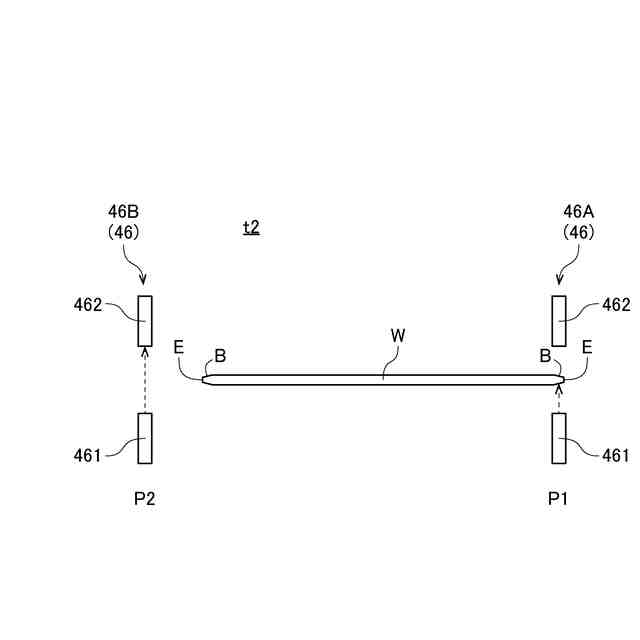
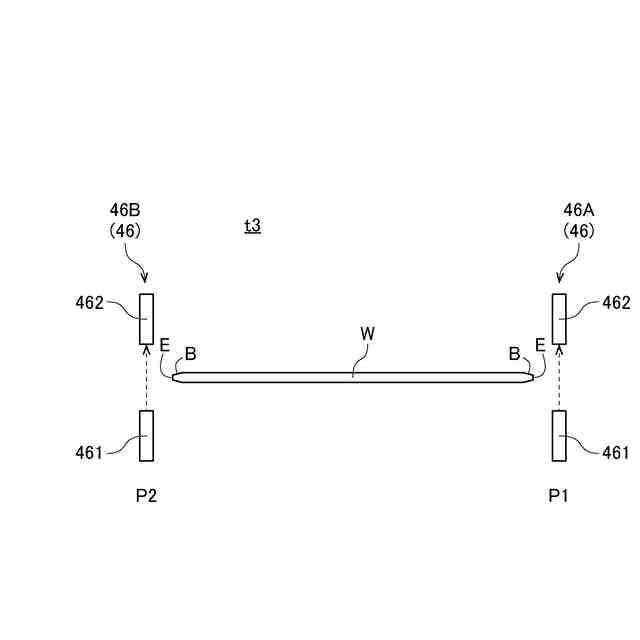
【解決手段】基板処理装置は、光センサ46と制御部とを備える。光センサ46は、基板Wの進退経路上の検出位置P1,P2において検査光を投受光し、検査光の受光量がしきい値よりも低下した場合に遮光信号を出力する。制御部は、基板Wが検出位置P1から離れる場合、遮光信号の終端部に基づいて、基板WのエッジEの位置を検出する。また、制御部は、基板Wが検出位置P2へ接近する場合、遮光信号の始端部に基づいて、基板WのエッジEの位置を検出する。これにより、基板WのエッジE付近において出力される遮光信号のうち、最も基板Wの外側に近い部分の信号に基づいて、基板WのエッジEの位置を検出できる。したがって、透明な基板WのエッジEの位置を適切に検出できる。
【選択図】図3
特許請求の範囲
【請求項1】
透明な基板を処理する基板処理装置であって、
基板を保持するハンドと、
前記ハンドを所定の進退経路に沿って進退させる進退機構と、
前記進退経路上の検出位置において検査光を投受光し、前記検査光の受光量がしきい値よりも低下した場合に遮光信号を出力する光センサと、
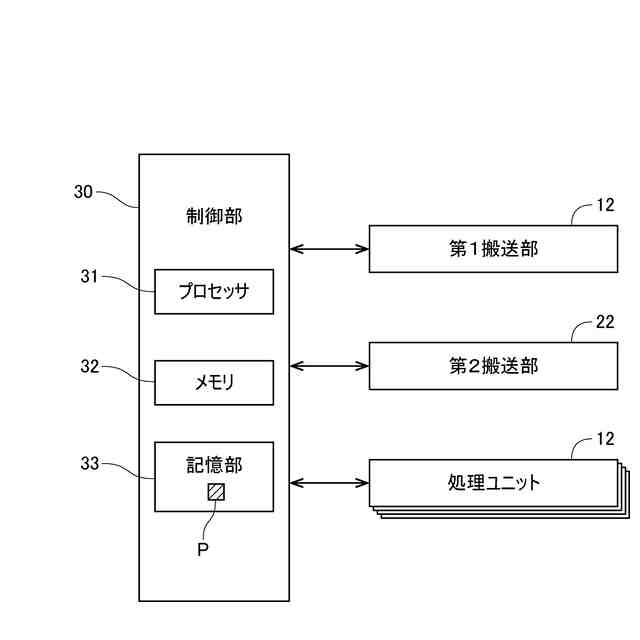
前記遮光信号に基づいて、基板のエッジの位置を検出する制御部と、
を備え、
前記制御部は、
基板が前記検出位置へ接近する場合、前記遮光信号の始端部に基づいて、基板のエッジの位置を検出し、
基板が前記検出位置から離れる場合、前記遮光信号の終端部に基づいて、基板のエッジの位置を検出する、基板処理装置。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の基板処理装置であって、
前記進退機構は、前記ハンドを、基板を収納する原点位置と、基板の授受を行う授受位置との間で進退させ、
前記制御部は、前記ハンドが、前記授受位置から前記原点位置へ移動する途中において、基板のエッジの位置を検出する、基板処理装置。
【請求項3】
請求項2に記載の基板処理装置であって、
前記光センサは、前記原点位置の近傍に位置する、基板処理装置。
【請求項4】
請求項3に記載の基板処理装置であって、
前記光センサは、
前記進退経路上の第1検出位置において、基板の移動方向の後端部を検出する第1光センサと、
前記第1検出位置よりも前記原点位置側の第2検出位置において、基板の移動方向の前端部を検出する第2光センサと、
を有する、基板処理装置。
【請求項5】
請求項1から請求項4までのいずれか1項に記載の基板処理装置であって、
前記制御部は、検出したエッジの位置に基づいて、前記ハンドに対する基板の相対位置を算出する、基板処理装置。
【請求項6】
請求項5に記載の基板処理装置であって、
複数の処理ユニットと、
前記複数の処理ユニットの間で基板を搬送する搬送ロボットと、
を備え、
前記搬送ロボットが、前記ハンド、前記進退機構、および前記光センサを有し、
前記制御部は、
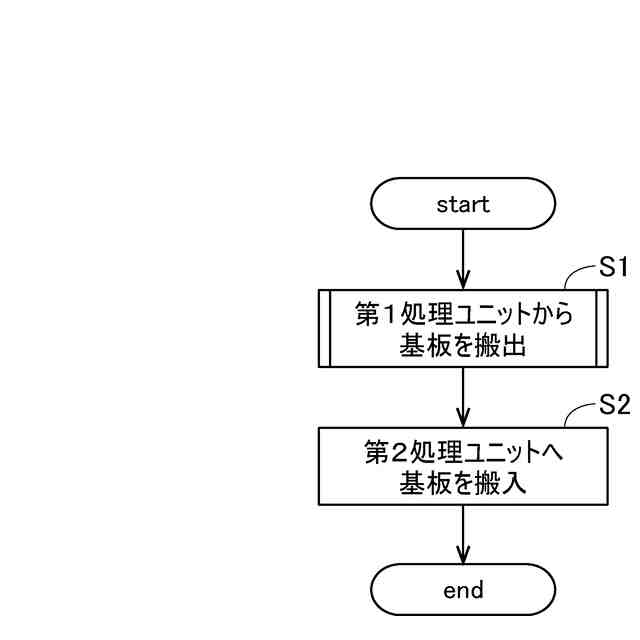
1つの処理ユニットから基板を搬出するときに、前記相対位置を算出し、
他の処理ユニットへ基板を搬入するときに、前記相対位置に基づいて前記ハンドの位置を調整する、基板処理装置。
【請求項7】
透明な基板を処理する基板処理方法であって、
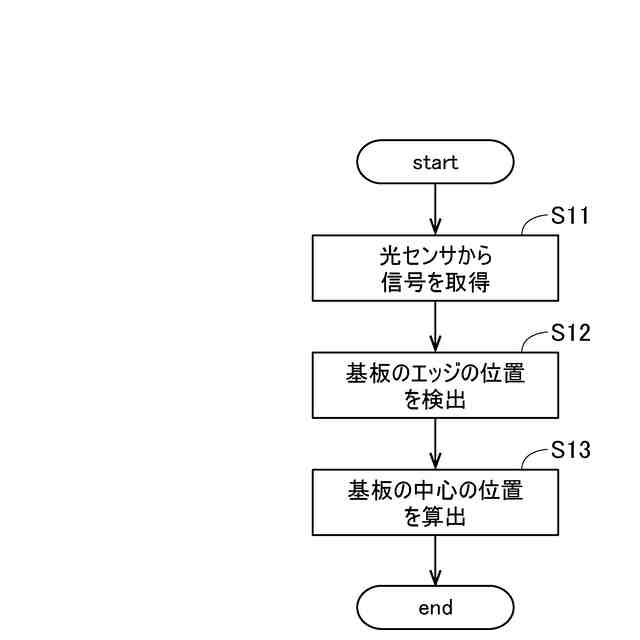
基板の進退経路上の検出位置において検査光を投受光し、前記検査光の受光量がしきい値よりも低下した場合に遮光信号を出力する信号出力工程と、
前記遮光信号に基づいて、基板のエッジの位置を検出する検出工程と、
を有し、
前記検出工程では、
基板が前記検出位置へ接近する場合、前記遮光信号の始端部に基づいて、基板のエッジの位置を検出し、
基板が前記検出位置から離れる場合、前記遮光信号の終端部に基づいて、基板のエッジの位置を検出する、基板処理方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、透明な基板を処理する基板処理装置および基板処理方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
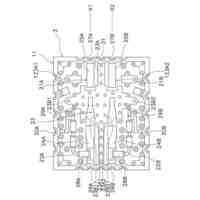
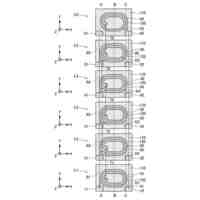
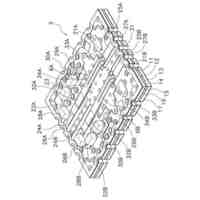
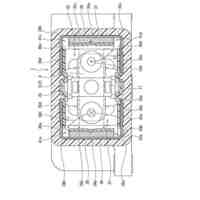
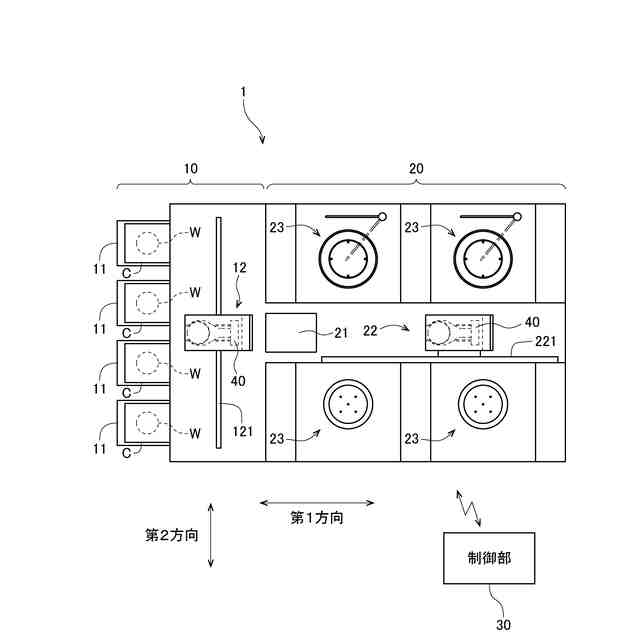
従来、半導体ウェハや液晶ディスプレイ等の基板の製造工程では、基板に対して、処理液の塗布、現像、熱処理、洗浄等の複数の処理を行う基板処理装置が使用される。この種の装置では、複数の処理ユニットの間で、搬送ロボットにより基板が搬送される。搬送ロボットを有する従来の基板処理装置については、例えば、特許文献1に記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2018-133415号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
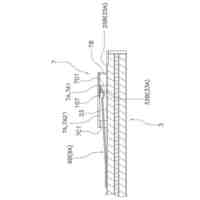
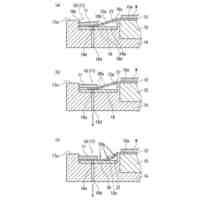
従来の搬送ロボットは、基板のエッジの位置を検出する透過型の光センサを有する。光センサは、基板の搬送経路の下方に位置する透光器から、搬送経路の上方に位置する受光器へ向けて、検査光を出射する。そして、制御部は、受光器における検査光の受光の有無が切り替わる時点を、基板のエッジが通過した時点と認識する。
【0005】
しかしながら、処理対象の基板が透明である場合、光センサの検査光が、基板で遮光されることなく透過する。このため、従来と同じ方法では、透明な基板のエッジを精度よく検出することが難しいという問題がある。
【0006】
本発明は、このような事情に鑑みなされたものであり、透明な基板のエッジの位置を適切に検出できる基板処理装置および基板処理方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本願の第1発明は、透明な基板を処理する基板処理装置であって、基板を保持するハンドと、前記ハンドを所定の進退経路に沿って進退させる進退機構と、前記進退経路上の検出位置において検査光を投受光し、前記検査光の受光量がしきい値よりも低下した場合に遮光信号を出力する光センサと、前記遮光信号に基づいて、基板のエッジの位置を検出する制御部と、を備え、前記制御部は、基板が前記検出位置へ接近する場合、前記遮光信号の始端部に基づいて、基板のエッジの位置を検出し、基板が前記検出位置から離れる場合、前記遮光信号の終端部に基づいて、基板のエッジの位置を検出する。
【0008】
本願の第2発明は、第1発明の基板処理装置であって、前記進退機構は、前記ハンドを、基板を収納する原点位置と、基板の授受を行う授受位置との間で進退させ、前記制御部は、前記ハンドが、前記授受位置から前記原点位置へ移動する途中において、基板のエッジの位置を検出する。
【0009】
本願の第3発明は、第2発明の基板処理装置であって、前記光センサは、前記原点位置の近傍に位置する。
【0010】
本願の第4発明は、第1発明から第3発明までのいずれか1発明の基板処理装置であって、前記光センサは、前記進退経路上の第1検出位置において、基板の移動方向の後端部を検出する第1光センサと、前記第1検出位置よりも前記原点位置側の第2検出位置において、基板の移動方向の前端部を検出する第2光センサと、を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日星電気株式会社
平型電線
3日前
個人
汎用型電気プラグ
13日前
キヤノン株式会社
通信装置
7日前
オムロン株式会社
電磁継電器
8日前
オムロン株式会社
電磁継電器
8日前
太陽誘電株式会社
コイル部品
13日前
株式会社GSユアサ
蓄電設備
2日前
オムロン株式会社
電磁継電器
8日前
オムロン株式会社
電磁継電器
8日前
オムロン株式会社
電磁継電器
8日前
株式会社村田製作所
電池
1日前
タイガースポリマー株式会社
2次電池
15日前
富士通株式会社
冷却モジュール
8日前
トヨタ自動車株式会社
二次電池
2日前
オムロン株式会社
回路部品
8日前
日本電気株式会社
光学モジュール
7日前
ローム株式会社
半導体装置
1日前
TDK株式会社
コイル部品
7日前
住友電装株式会社
コネクタ
1日前
株式会社東京精密
ワーク保持装置
6日前
オムロン株式会社
電磁継電器
8日前
富士電機株式会社
電磁接触器
13日前
三菱電機株式会社
半導体装置
8日前
KDDI株式会社
伸展マスト
2日前
トヨタバッテリー株式会社
二次電池
9日前
株式会社村田製作所
二次電池
1日前
新電元工業株式会社
磁性部品
15日前
ニチコン株式会社
コンデンサ
14日前
株式会社東芝
半導体装置
6日前
富士電機株式会社
半導体モジュール
1日前
芝浦メカトロニクス株式会社
基板処理装置
1日前
オムロン株式会社
スイッチング素子
1日前
富士電機株式会社
回路遮断器
8日前
株式会社東芝
半導体装置
15日前
オムロン株式会社
電磁継電器
8日前
オムロン株式会社
電磁継電器
8日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ