TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025043299
公報種別
公開特許公報(A)
公開日
2025-03-28
出願番号
2024153347
出願日
2024-09-05
発明の名称
物標追尾装置、物標追尾方法および物標追尾プログラム
出願人
古野電気株式会社
代理人
弁理士法人ワンディ-IPパ-トナ-ズ
主分類
G01S
13/66 20060101AFI20250321BHJP(測定;試験)
要約
【課題】物標の誤追尾を抑制する。
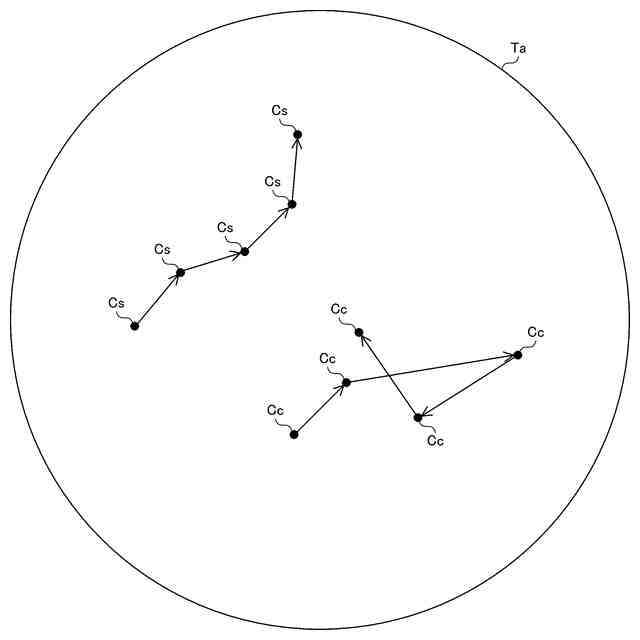
【解決手段】物標追尾装置は、検知対象エリアにおいて物標を所定の周期のタイミングで検出し追尾する物標追尾装置であって、前記検知対象エリアにおける位置と、アンテナを介して送信された電磁波が前記位置において反射された反射波のレベルとの対応関係を示すエコーデータを取得する取得部と、前記エコーデータに基づいて、前記物標を追尾する追尾処理を行う追尾部と、前記タイミングで取得した時系列の前記エコーデータに基づいて、前記反射波のレベルが所定値以上である反射体を抽出し、前記タイミングで得られる抽出結果に基づいて該反射体のふらつきを示す指標値を算出する算出部と、前記指標値が閾値以上であるか否かを判定する判定部とを備える。
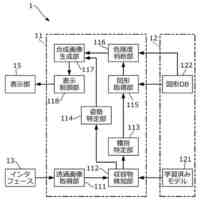
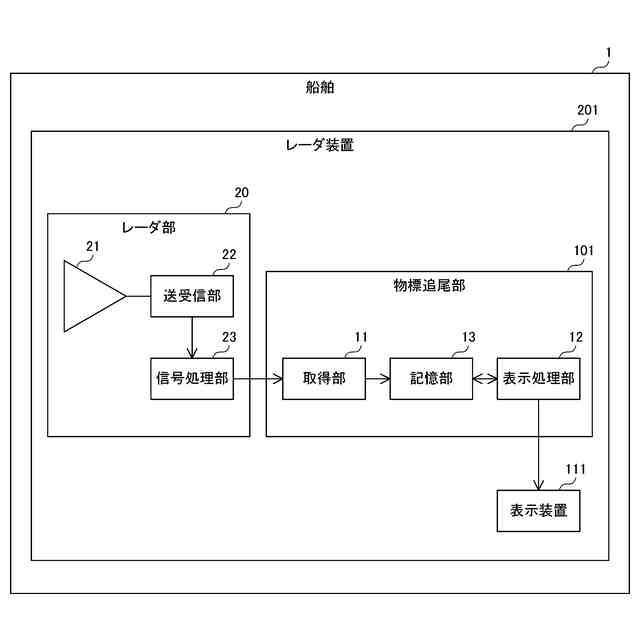
【選択図】図1
特許請求の範囲
【請求項1】
検知対象エリアにおいて物標を所定の周期のタイミングで検出し追尾する物標追尾装置であって、
前記検知対象エリアにおける位置と、アンテナを介して送信された電磁波が前記位置において反射された反射波のレベルとの対応関係を示すエコーデータを取得する取得部と、
前記エコーデータに基づいて、前記物標を追尾する追尾処理を行う追尾部と、
前記タイミングで取得した時系列の前記エコーデータに基づいて、前記反射波のレベルが所定値以上である反射体を抽出し、前記タイミングで得られる抽出結果に基づいて該反射体のふらつきを示す指標値を算出する算出部と、
前記指標値が閾値以上であるか否かを判定する判定部とを備える、物標追尾装置。
続きを表示(約 1,100 文字)
【請求項2】
前記追尾部は、前記指標値が前記閾値未満である場合、前記反射体を前記物標として追尾し、前記指標値が前記閾値以上である場合、前記反射体を前記追尾処理における追尾対象から外す、請求項1に記載の物標追尾装置。
【請求項3】
前記追尾部は、前記追尾処理における追尾対象から外した前記反射体を追尾するバックグラウンド追尾処理をさらに行い、
前記追尾部は、前記追尾処理において追尾した前記物標の追尾結果を表示する処理を行い、前記バックグラウンド追尾処理において追尾した前記反射体の追尾結果を表示する処理を行わない、請求項2に記載の物標追尾装置。
【請求項4】
前記追尾部は、前記追尾処理における追尾対象から外した前記反射体を追尾するバックグラウンド追尾処理をさらに行い、
前記追尾部は、前記追尾処理において追尾した前記物標の追尾結果と、前記バックグラウンド追尾処理において追尾した前記反射体の追尾結果とを、互いに異なる態様で表示する処理を行う、請求項2に記載の物標追尾装置。
【請求項5】
前記取得部は、前記エコーデータを繰り返し取得し、
前記追尾部は、第1の前記エコーデータに基づいて検知した前記反射体のふらつきを示す前記指標値が前記閾値以上である場合、前記反射体を、前記第1のエコーデータおよび前記第1のエコーデータの後に取得される前記エコーデータに基づく前記追尾処理における追尾対象から外す、請求項2に記載の物標追尾装置。
【請求項6】
前記追尾部は、前記反射体を前記追尾処理における追尾対象から外した場合、前記物標の位置を前記物標の予測位置で補間する補間処理を行う、請求項2に記載の物標追尾装置。
【請求項7】
前記物標追尾装置は、さらに、
前記反射体の大きさに基づいて、前記閾値を決定する決定部を備える、請求項1から請求項6のいずれか1項に記載の物標追尾装置。
【請求項8】
前記決定部は、前記反射体を多角形の参照領域で近似し、前記参照領域の大きさに基づいて、前記閾値を決定する、請求項7に記載の物標追尾装置。
【請求項9】
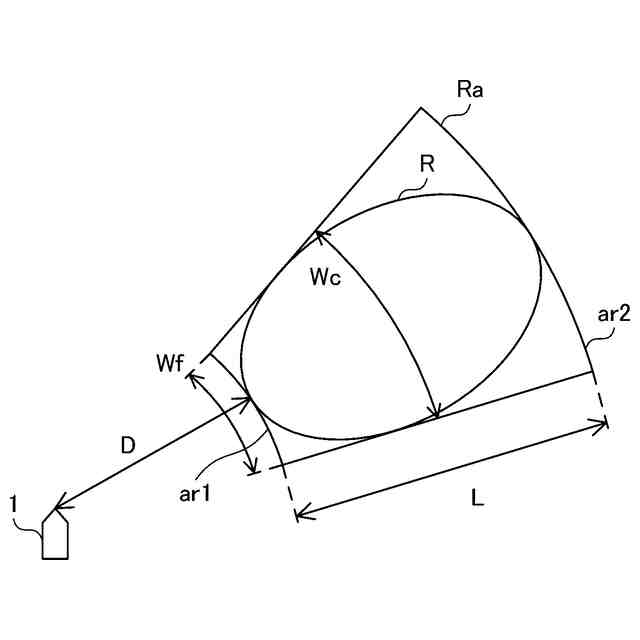
前記決定部は、前記反射体を、前記アンテナから距離方向に延びる2本の直線と、前記アンテナを中心とする方位角方向に延びる2つの円弧とにより囲まれる参照領域で近似し、前記参照領域の大きさに基づいて、前記閾値を決定する、請求項7に記載の物標追尾装置。
【請求項10】
前記決定部は、前記アンテナと前記反射体との間の距離に基づいて、前記反射体の大きさを算出する、請求項7に記載の物標追尾装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、物標追尾装置、物標追尾方法および物標追尾プログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、エコーデータに基づいて物標を追尾する機能を有するレーダ装置において、クラッタを抑圧するための技術が開発されている。たとえば、特許文献1(特開2012-103197号公報)には、以下のような移動目標対応型スキャン相関方法が記載されている。すなわち、移動目標対応型スキャン相関方法は、レーダ、超音波、光学カメラ装置の信号受信部より逐次出力されるビデオ信号をスキャン毎記憶する受信映像メモリと、前記受信映像メモリに記憶された複数のスキャン画像を小区画領域に分割し、その領域内に存在するターゲットの移動ベクトルを算出する移動ベクトル算出部と、前記小区画領域内にターゲットが存在する可能性を示す指標を算出するターゲット指標算出部と、前記小領域領域内のクラッタレベルを算出するクラッタレベル算出部と、前記、ターゲット指標算出部、移動ベクトル算出部、クラッタレベル算出部のそれぞれの出力を入力とするスキャン相関処理部と、前記スキャン相関処理部の出力を表示する表示部とを有する。
【先行技術文献】
【特許文献】
【0003】
特開2012-103197号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術を超えて、物標の誤追尾を抑制することが可能な技術が望まれる。
【0005】
この発明は、上述の課題を解決するためになされたもので、その目的は、物標の誤追尾を抑制することが可能な物標追尾装置、物標追尾方法および物標追尾プログラムを提供することである。
【課題を解決するための手段】
【0006】
(1)上記課題を解決するために、この発明のある局面に係る物標追尾装置は、検知対象エリアにおいて物標を所定の周期のタイミングで検出し追尾する物標追尾装置であって、前記検知対象エリアにおける位置と、アンテナを介して送信された電磁波が前記位置において反射された反射波のレベルとの対応関係を示すエコーデータを取得する取得部と、前記エコーデータに基づいて、前記物標を追尾する追尾処理を行う追尾部と、前記タイミングで取得した時系列の前記エコーデータに基づいて、前記反射波のレベルが所定値以上である反射体を抽出し、前記タイミングで得られる抽出結果に基づいて該反射体のふらつきを示す指標値を算出する算出部と、前記指標値が閾値以上であるか否かを判定する判定部とを備える。
【0007】
ふらつきが大きい反射体は、実際はクラッタの発生地点であったりすることがあり、追尾すべき物標ではない場合がある。そこで、反射体のふらつきを示す指標値を設定し、この指標値を反射体について算出し閾値以上であるか否かを判定する構成により、当該反射体が追尾対象とすべきか否かを判断することができる。
【0008】
(2)上記(1)において、前記追尾部は、前記指標値が前記閾値未満である場合、前記反射体を前記物標として追尾し、前記指標値が前記閾値以上である場合、前記反射体を前記追尾処理における追尾対象から外してもよい。
【0009】
このような構成により、ふらつきが小さい反射体を物標として追尾する一方で、クラッタの発生地点等の、ふらつきが大きい反射体を追尾することを抑制することができる。したがって、物標の誤追尾を抑制することができるとともに、追尾処理における処理負荷を軽減することができる。
【0010】
(3)上記(2)において、前記追尾部は、前記追尾処理における追尾対象から外した前記反射体を追尾するバックグラウンド追尾処理をさらに行ってもよい。また、前記追尾部は、前記追尾処理において追尾した前記物標の追尾結果を表示する処理を行い、前記バックグラウンド追尾処理において追尾した前記反射体の追尾結果を表示する処理を行わなくてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
位置検出装置
4日前
株式会社ハシマ
検針機
7日前
エイブリック株式会社
電流検出回路
1日前
東レ株式会社
シート状物の検査方法
2日前
東ソー株式会社
自動分析装置及び方法
4日前
株式会社チノー
放射光測温装置
1日前
株式会社 キョーワ
食品搬送装置
1日前
日本特殊陶業株式会社
ガスセンサ
1日前
日本特殊陶業株式会社
ガスセンサ
1日前
日本碍子株式会社
ガスセンサ
1日前
富士電機株式会社
エンコーダ
2日前
TDK株式会社
温度センサ
2日前
株式会社ヨコオ
シートコンタクタ
4日前
シチズンファインデバイス株式会社
圧力検出装置
1日前
シチズンファインデバイス株式会社
圧力検出装置
1日前
オムロン株式会社
光電センサ
1日前
スタンレー電気株式会社
車両前方視認装置
7日前
本田技研工業株式会社
物体検出装置
7日前
スタンレー電気株式会社
車両前方視認装置
7日前
本田技研工業株式会社
物体検出装置
7日前
ダイハツ工業株式会社
凹部の深さ測定方法
7日前
TDK株式会社
センサデバイス
1日前
株式会社ミツバ
モータ制御装置
1日前
旭光電機株式会社
電気的特性提供装置
1日前
JRCモビリティ株式会社
充電用温度判定回路
4日前
セイコーエプソン株式会社
干渉計
4日前
TDK株式会社
センサ
2日前
日本信号株式会社
表示装置
2日前
内山工業株式会社
分析装置用部材
3日前
日東建設株式会社
ボルト・ナットの健全性検査装置
7日前
株式会社オーケープランニング
スパン調整法
1日前
株式会社SUBARU
蓄電池の状態センサ装置
4日前
大陽日酸株式会社
試験体の熱特性を測定する試験装置
1日前
株式会社キーエンス
レベル計
7日前
国立大学法人 東京大学
粘性の測定装置及び方法
3日前
株式会社キーエンス
レベル計
7日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ