TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025039179
公報種別
公開特許公報(A)
公開日
2025-03-21
出願番号
2023146079
出願日
2023-09-08
発明の名称
車両位置推定装置および車両位置推定システム、車両位置推定方法
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社ミライズテクノロジーズ
代理人
弁理士法人明成国際特許事務所
主分類
G01C
21/28 20060101AFI20250313BHJP(測定;試験)
要約
【課題】車両位置の推定を精度よく行える技術を提供する。
【解決手段】車両位置推定装置110は、第1車両10の座標位置を取得する座標取得部114と、座標取得部が取得した座標位置を含む地図情報を取得する地図情報取得部115と、第1車両に搭載されている周辺センサによって検出された第1車両の周辺に位置する物標を示す周辺情報を取得する周辺情報取得部116と、地図情報と周辺情報とを用いて、第1車両の位置を示す第1車両位置を推定する車両位置推定部117と、周辺情報を用いて、第1車両に対する第1車両の周辺に位置する第2車両20の相対位置を推定する相対位置推定部118と、第2車両から取得する第2車両の位置を示す第2車両位置と相対位置とを用いて第1車両位置を補正する補正部119と、を備える。
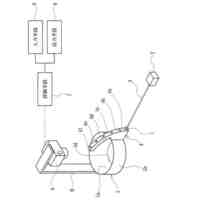
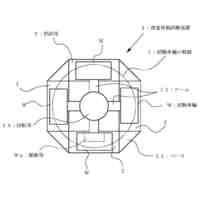
【選択図】図1
特許請求の範囲
【請求項1】
車両位置推定装置(110、110D)であって、
第1車両(10)の座標位置を取得する座標取得部(114)と、
前記座標取得部が取得した前記座標位置を含む地図情報を取得する地図情報取得部(115)と、
前記第1車両に搭載されている周辺センサによって検出された前記第1車両の周辺に位置する物標を示す周辺情報を取得する周辺情報取得部(116)と、
前記地図情報と前記周辺情報とを用いて、前記第1車両の位置を示す第1車両位置を推定する車両位置推定部(117)と、
前記周辺情報を用いて、前記第1車両に対する前記第1車両の周辺に位置する第2車両(20)の相対位置を推定する相対位置推定部(118)と、
前記第2車両から取得する前記第2車両の位置を示す第2車両位置と前記相対位置とを用いて前記第1車両位置を補正する補正部(119)と、を備える、車両位置推定装置。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の車両位置推定装置であって、
前記相対位置推定部は、前記第1車両に対する複数の前記第2車両との各相対位置を推定し、
前記補正部は、複数の前記第2車両の各第2車両位置と各前記相対位置を用いて前記第1車両位置を補正する、車両位置推定装置。
【請求項3】
請求項1または請求項2に記載の車両位置推定装置であって、
前記補正部は、
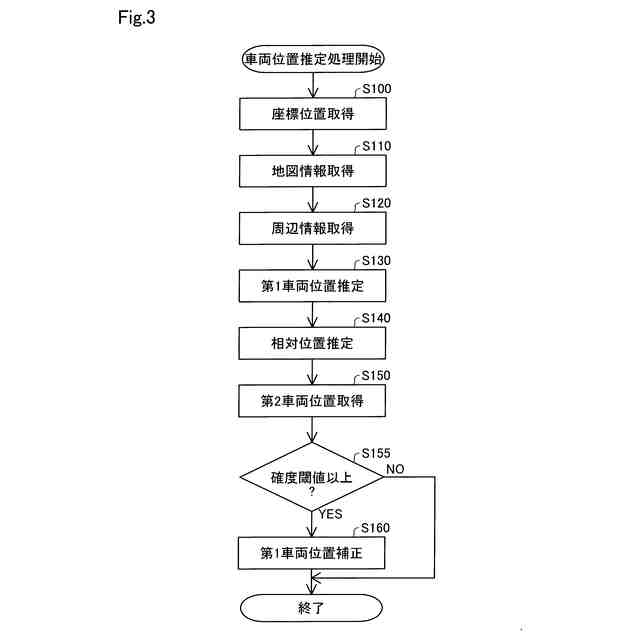
前記第1車両位置の確度を示す第1確度が前記第2車両位置の確度を示す第2確度より高い場合に、前記第1車両位置を前記第2車両位置と前記相対位置を用いて推定した前記第1車両位置である新第1車両位置よりも前記車両位置推定部が推定した前記第1車両位置である仮第1車両位置に近い位置に補正し、
前記第2確度が前記第1確度より高い場合に、前記第1車両位置を前記仮第1車両位置よりも前記新第1車両位置に近い位置に補正する、車両位置推定装置。
【請求項4】
請求項1または請求項2に記載の車両位置推定装置であって、
前記補正部は、前記第2車両位置の確度を示す第2確度が予め定められた閾値以上の前記第2車両位置と前記相対位置を用いて前記第1車両位置を補正する、車両位置推定装置。
【請求項5】
請求項1または請求項2に記載の車両位置推定装置であって、更に、
前記第2車両の車種と前記第2車両のサイズとの少なくとも一方を含む第2車両情報を取得する車両情報取得部(150)を備え、
前記相対位置推定部は、前記周辺情報と前記第2車両情報とを用いて、前記第1車両の周辺に位置する車両のうちから前記第2車両を特定し、前記相対位置を推定する、車両位置推定装置。
【請求項6】
車両位置推定システム(500、500D)であって、
第1車両と、
前記第1車両の周辺に位置する第2車両と、
前記第1車両の座標位置を取得する座標取得部と、
前記座標取得部が取得した前記座標位置を含む地図情報を取得する地図情報取得部と、
前記第1車両に搭載されている周辺センサによって検出された前記第1車両の周辺に位置する物標を示す周辺情報を取得する周辺情報取得部と、
前記座標位置と前記地図情報と前記周辺情報とを用いて、前記第1車両の位置を示す第1車両位置を推定する車両位置推定部と、
前記周辺情報を用いて、前記第1車両に対する前記第2車両の相対位置を推定する相対位置推定部と、
前記第2車両の位置を示す第2車両位置と前記相対位置を用いて前記第1車両位置を補正する補正部と、を備える、車両位置推定システム。
【請求項7】
車両位置推定方法であって、
第1車両の座標位置を取得する座標取得工程と、
前記座標位置を含む地図情報を取得する地図情報取得工程と、
前記第1車両の周辺に位置する物標を示す周辺情報を取得する周辺情報取得工程と、
前記座標位置と前記地図情報と前記周辺情報とを用いて、前記第1車両の位置を示す第1車両位置を推定する車両位置推定工程と、
前記周辺情報を用いて、前記第1車両に対する前記第1車両の周辺に位置する第2車両の相対位置を推定する相対位置推定工程と、
前記第2車両の位置を示す第2車両位置を取得する第2車両位置取得工程と、
前記第2車両位置と前記相対位置を用いて前記第1車両位置を補正する補正工程と、を含む、車両位置推定方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両位置推定装置および車両位置推定システム、車両位置推定方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
車両位置推定装置としてGPS(Global Positioning System)などの汎地球航法衛星システム(Global Navigation Satellite System(s)(GNSS))を用いて測位した情報を用いて、車両の位置を推定する技術が知られている。特許文献1には、車両が推定した自己位置を車両に搭載された端末と共有する技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-201083号公報
特開2011-58909号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
人や建物、車両が混雑した都市部において、GNSSによる測位の精度や、車両に搭載されたセンサにより取得した車両の周辺の情報と地図情報とを用いて推定する自己位置の推定精度は低下する。そのため、車両位置の推定を精度よく行える技術が求められていた。
【課題を解決するための手段】
【0005】
本開示は、上述の課題を解決するためになされたものであり、以下の形態として実現することが可能である。
【0006】
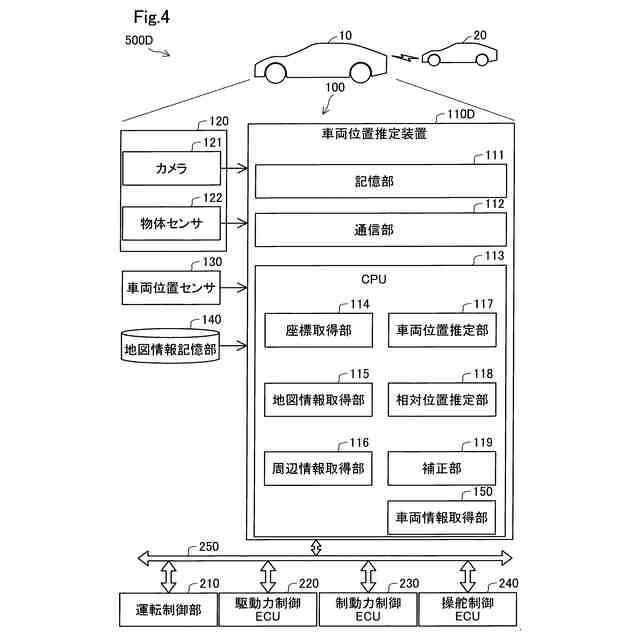
本開示の一形態によれば、車両位置推定装置(110、110D)が提供される。この車両位置推定装置は、第1車両(10)の座標位置を取得する座標取得部(114)と、前記座標取得部が取得した前記座標位置を含む地図情報を取得する地図情報取得部(115)と、前記第1車両に搭載されている周辺センサによって検出された前記第1車両の周辺に位置する物標を示す周辺情報を取得する周辺情報取得部(116)と、前記地図情報と前記周辺情報とを用いて、前記第1車両の位置を示す第1車両位置を推定する車両位置推定部(117)と、前記周辺情報を用いて、前記第1車両に対する前記第1車両の周辺に位置する第2車両(20)の相対位置を推定する相対位置推定部(118)と、前記第2車両から取得する前記第2車両の位置を示す第2車両位置と前記相対位置とを用いて前記第1車両位置を補正する補正部(119)と、を備える。
【0007】
この形態の車両位置推定装置によれば、第2車両位置と相対位置を用いて第1車両位置を補正する。そのため、第1車両位置の推定を精度よく行える。
【図面の簡単な説明】
【0008】
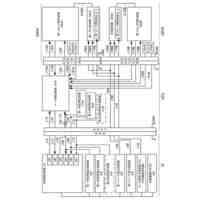
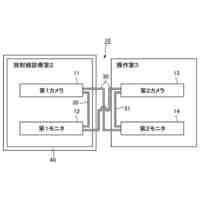
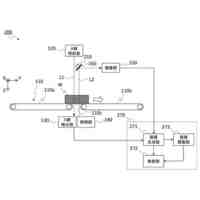
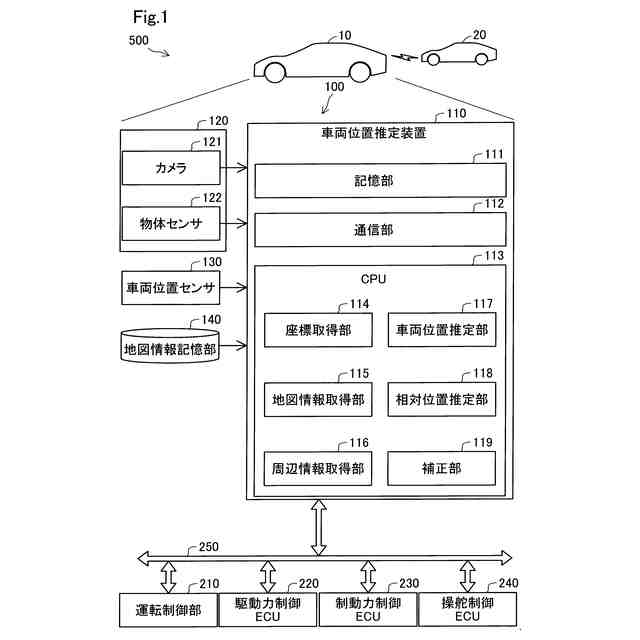
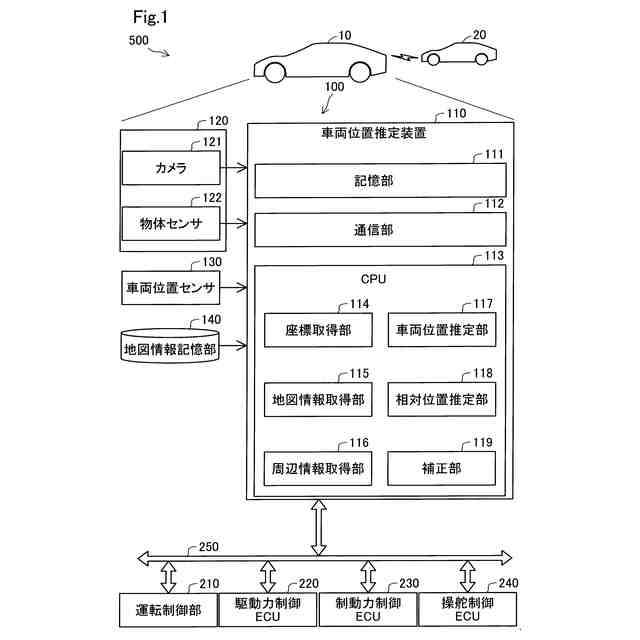
車両位置推定システムの構成を示す概要図である。
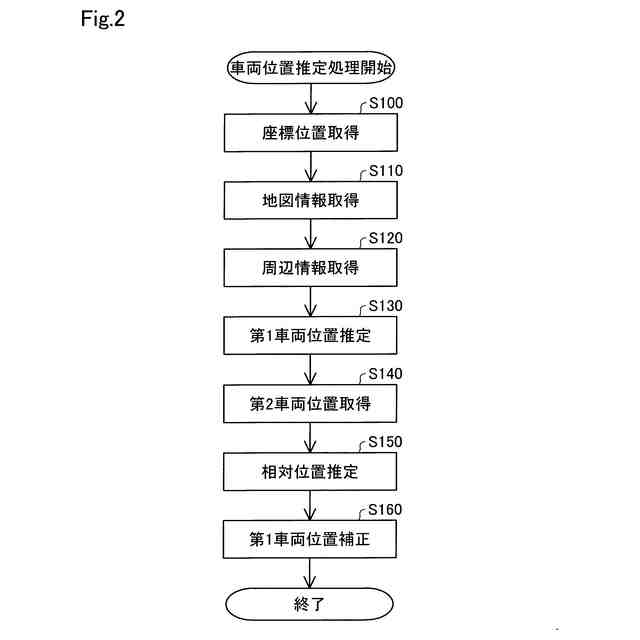
車両位置推定処理の一例を示すフローチャートである。
第3実施形態における車両位置推定処理の一例を示すフローチャートである。
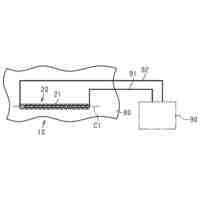
第4実施形態における車両位置推定システムの構成を示す概要図である。
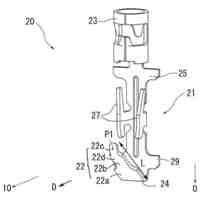
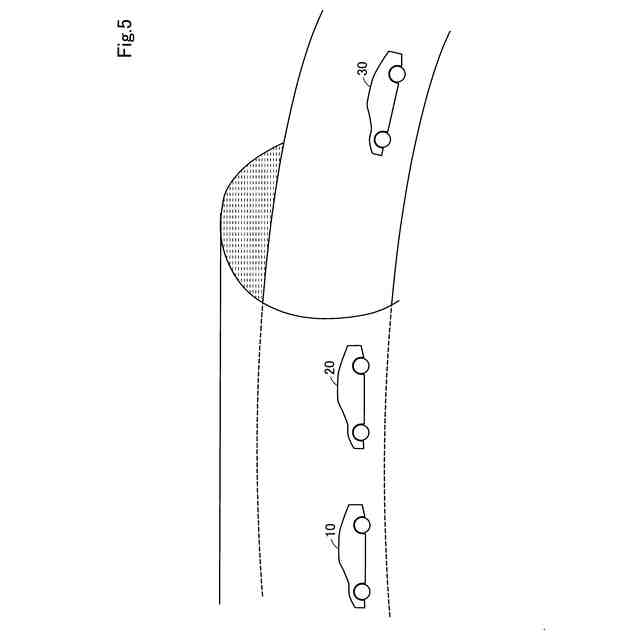
第1車両と第2車両との位置関係の一例を示す図である。
【発明を実施するための形態】
【0009】
A.第1実施形態:
図1に示すように、車両位置推定システム500は、第1車両10と第2車両20と車両位置推定装置110を備える。本実施形態において、車両位置推定装置110は、第1車両10に搭載されている。車両位置推定装置110は、第1車両10の位置を示す第1車両位置を推定する。第2車両20は第1車両10の周辺に位置する車両である。車両位置推定システム500は、建物が多く、人と車両で混雑した環境において用いられる。このようなGNSSによる測位の精度が低下する環境であっても、車両位置推定システム500によって第1車両位置を推定できる。
【0010】
本実施形態の第1車両10は、自動運転制御システム100を備える。本実施形態において、自動運転制御システム100は、第1車両10の自動運転を実行する。本実施形態において、自動運転制御システム100は、車両位置推定装置110と、周辺センサ120と、車両位置センサ130と、地図情報記憶部140と、運転制御部210と、駆動力制御ECU(Electronic Control Unit)220と、制動力制御ECU230と、操舵制御ECU240と、を備える。車両位置推定装置110と、駆動力制御ECU220と、制動力制御ECU230と、操舵制御ECU240とは、車載ネットワーク250を介して接続される。なお、第1車両10は、自動運転に限らず、運転手によって手動で行われる手動運転によって運転されてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
粒子分析装置
16日前
株式会社イシダ
計量装置
10日前
個人
アクセサリー型テスター
17日前
個人
準結晶の解析方法
2日前
日本精機株式会社
アセンブリ
2日前
株式会社豊田自動織機
自動走行体
1日前
栄進化学株式会社
浸透探傷用濃縮液
23日前
株式会社テイエルブイ
振動検出装置
16日前
株式会社ミツトヨ
画像測定機
18日前
ダイハツ工業株式会社
試料セル
16日前
トヨタ自動車株式会社
検査装置
10日前
トヨタ自動車株式会社
電気自動車
17日前
GEE株式会社
光学特性測定装置
1日前
日本特殊陶業株式会社
ガスセンサ
2日前
大和製衡株式会社
計量装置
23日前
理研計器株式会社
ガス検出器
18日前
株式会社TISM
センサ部材
1日前
理研計器株式会社
ガス検出器
18日前
理研計器株式会社
ガス検出器
18日前
理研計器株式会社
ガス検出器
18日前
株式会社熊谷組
計測システム
23日前
大成建設株式会社
画像表示システム
26日前
理研計器株式会社
ガス検出器
18日前
東ソー株式会社
簡易型液体クロマトグラフ
12日前
大和製衡株式会社
表示システム
8日前
株式会社ニコン
検出装置
16日前
株式会社 システムスクエア
検査装置
24日前
株式会社小糸製作所
物体検知システム
2日前
リバークル株式会社
荷重移動試験装置
10日前
大和ハウス工業株式会社
引張装置
9日前
株式会社デンソー
試験装置
26日前
東洋計器株式会社
超音波式流量計
23日前
東洋計器株式会社
超音波式流量計
23日前
東洋計器株式会社
超音波式流量計
23日前
株式会社イシダ
搬送装置
8日前
アンリツ株式会社
機器及びフィルタ
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ