TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025038569
公報種別
公開特許公報(A)
公開日
2025-03-19
出願番号
2023145266
出願日
2023-09-07
発明の名称
パラメータ調整装置、位置決めシステム、位置決め方法および電子部品実装基板の製造方法
出願人
三菱電機株式会社
,
国立研究開発法人産業技術総合研究所
代理人
個人
主分類
G05D
3/12 20060101AFI20250312BHJP(制御;調整)
要約
【課題】パラメータの調整が完了するまでの期間であってもユーザにとって好ましくないパラメータを用いてモータが動作する可能性を低減することが可能なパラメータ調整装置を得ること。
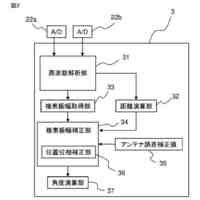
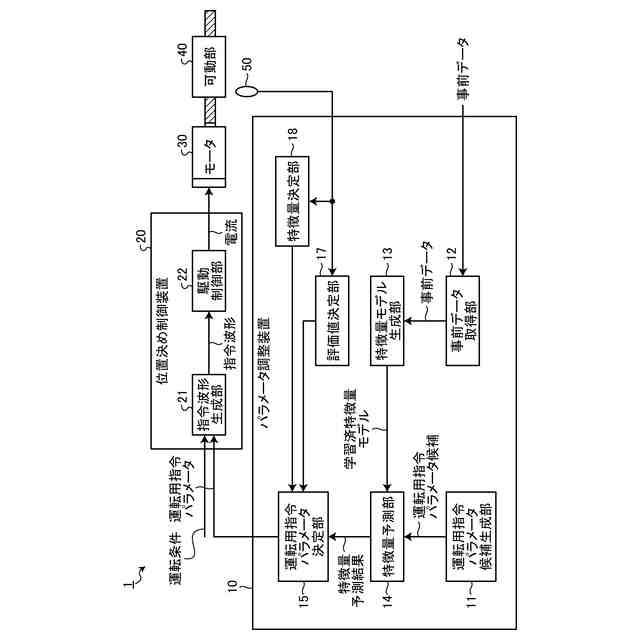
【解決手段】位置決め制御装置20に向けて運転用指令パラメータを出力するパラメータ調整装置10において、運転用指令パラメータ候補を複数生成する運転用指令パラメータ候補生成部11と、試行的な位置決め動作を実行した際の特徴量を含む事前データを取得する事前データ取得部12と、事前データを用いて、学習済特徴量モデルを生成する特徴量モデル生成部13と、学習済特徴量モデルを用いて各運転用指令パラメータ候補に対応する特徴量予測結果を出力する特徴量予測部14と、特徴量予測結果に基づき複数の運転用指令パラメータ候補の中から1つを選択する運転用指令パラメータ決定部15と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
可動部を目標移動距離だけ移動させる位置決め動作を実行するモータの位置を指令する時系列信号である位置指令を運転用指令パラメータに基づいて生成する指令波形生成部と、前記位置指令に基づき電力を供給して前記モータを駆動する駆動制御部とを有する位置決め制御装置に向けて前記運転用指令パラメータを出力するパラメータ調整装置において、
前記運転用指令パラメータの候補である運転用指令パラメータ候補を複数生成する運転用指令パラメータ候補生成部と、
試行的な前記位置決め動作を実行した際の、前記位置決め制御装置、前記可動部および前記モータのうちの少なくともいずれか1つの状態を示す特徴量を含む事前データを取得する事前データ取得部と、
前記事前データを用いて、前記運転用指令パラメータから前記特徴量を推論するための学習済特徴量モデルを生成する特徴量モデル生成部と、
複数の前記運転用指令パラメータ候補を前記学習済特徴量モデルに入力して複数の運転用指令パラメータ候補のそれぞれに対して出力される前記特徴量の予測値を特徴量予測結果として出力する特徴量予測部と、
前記特徴量予測結果に基づき複数の前記運転用指令パラメータ候補の中から1つを選択して前記位置指令の生成に使用する運転用指令パラメータとして決定する運転用指令パラメータ決定部と、
を備えることを特徴とするパラメータ調整装置。
続きを表示(約 3,600 文字)
【請求項2】
試行的な前記位置決め動作の前記運転用指令パラメータに対応する前記位置決め動作の評価値を、前記運転用指令パラメータを用いた試行的な前記位置決め動作を実行した際の前記可動部または前記モータの位置を検出したセンサ信号に基づいて決定し、前記運転用指令パラメータ候補に対応する前記評価値を、前記運転用指令パラメータ候補から前記評価値を推論するための学習済評価値モデルを用いて決定する評価値決定部と、
前記事前データを用いて、前記学習済評価値モデルを生成する評価値モデル生成部と、
を備え、
前記運転用指令パラメータ決定部は、
前記特徴量予測結果および前記評価値に基づき、複数の前記運転用指令パラメータ候補の中から1つを選択して、前記位置決め制御装置が用いる前記運転用指令パラメータとして決定することを特徴とする請求項1に記載のパラメータ調整装置。
【請求項3】
前記評価値決定部は、前記特徴量予測結果を前記運転用指令パラメータ候補のそれぞれに対応づけて取得し、
前記運転用指令パラメータ候補に対応する前記特徴量予測結果が予め定めた条件を満たす場合、該運転用指令パラメータ候補の前記評価値の値を維持し、
前記運転用指令パラメータ候補に対応する前記特徴量予測結果が前記条件を満たさない場合、該運転用指令パラメータ候補の前記評価値を前記評価値の中の最悪値に基づいて更新することを特徴とする請求項2に記載のパラメータ調整装置。
【請求項4】
試行的な前記位置決め動作に対応する前記運転用指令パラメータに対して前記特徴量を決定する特徴量決定部、
をさらに備え、
前記特徴量決定部は、前記位置指令と前記可動部または前記モータの位置を検出したセンサ信号とを対比した結果に基づいて、前記特徴量を決定することを特徴とする請求項1に記載のパラメータ調整装置。
【請求項5】
前記評価値決定部は、
前記評価値を、前記可動部の移動距離の検出値と、前記目標移動距離との偏差の大きさが予め定めた許容値よりも小さくなるまでの時間である整定時間に基づいて決定することを特徴とする請求項2または3に記載のパラメータ調整装置。
【請求項6】
前記事前データ取得部は、
前記モータ、前記可動部および前記可動部が移動可能に設置される架台を備える位置決め装置の床面への固定の状態、前記位置決め装置の周囲の大気温度、前記位置決め装置の設置された床面の振動、前記位置決め装置の使用時間、および、前記位置決め装置の潤滑剤の状態のうちの少なくともいずれかひとつを、前記位置決め制御装置、前記可動部、および、前記モータのうちの少なくともいずれかひとつの状態を示す前記特徴量と対応づけて前記事前データとして保持し、
前記位置決め装置を第1の設置場所に設置して取得した前記事前データを第1の事前データとして保持し、
前記第1の設置場所と異なる第2の設置場所に前記位置決め装置を設置して取得した前記事前データを第2の事前データとして保持することを特徴とする請求項1に記載のパラメータ調整装置。
【請求項7】
可動部を目標移動距離だけ移動させる位置決め動作を実行するモータと、
前記モータの位置を指令する時系列信号である位置指令を運転用指令パラメータに基づいて生成する指令波形生成部と、前記位置指令に基づき電力を供給して前記モータを駆動する駆動制御部とを有する位置決め制御装置と、
前記位置決め制御装置に向けて前記運転用指令パラメータを出力するパラメータ調整装置と、
を備え、
前記パラメータ調整装置は、
前記運転用指令パラメータの候補である運転用指令パラメータ候補を複数生成する運転用指令パラメータ候補生成部と、
試行的な前記位置決め動作を実行した際の、前記位置決め制御装置、前記可動部および前記モータのうちの少なくともいずれか1つの状態を示す特徴量を含む事前データを取得する事前データ取得部と、
前記事前データを用いて、前記運転用指令パラメータから前記特徴量を推論するための学習済特徴量モデルを生成する特徴量モデル生成部と、
複数の前記運転用指令パラメータ候補を前記学習済特徴量モデルに入力して複数の運転用指令パラメータ候補のそれぞれに対して出力される前記特徴量の予測値を特徴量予測結果として出力する特徴量予測部と、
前記特徴量予測結果に基づき複数の前記運転用指令パラメータ候補の中から1つを選択して前記位置指令の生成に使用する運転用指令パラメータとして決定する運転用指令パラメータ決定部と、
を有することを特徴とする位置決めシステム。
【請求項8】
パラメータ調整装置が、位置決め制御装置に向けて出力する運転用指令パラメータの候補である運転用指令パラメータ候補を複数生成するステップと、
前記パラメータ調整装置が、モータが可動部を目標移動距離だけ移動させる位置決め動作を試行的に実行した際の、前記位置決め制御装置、前記可動部および前記モータのうちの少なくともいずれか1つの状態を示す特徴量を含む事前データを取得するステップと、
前記パラメータ調整装置が、前記事前データを用いて、前記運転用指令パラメータから前記特徴量を推論するための学習済特徴量モデルを生成するステップと、
前記パラメータ調整装置が、複数の前記運転用指令パラメータ候補を前記学習済特徴量モデルに入力して複数の運転用指令パラメータ候補のそれぞれに対して出力される前記特徴量の予測値を特徴量予測結果として出力するステップと、
前記パラメータ調整装置が、前記特徴量予測結果に基づき複数の前記運転用指令パラメータ候補の中から1つを選択して前記位置決め制御装置が使用する運転用指令パラメータとして決定するステップと、
前記位置決め制御装置が、前記パラメータ調整装置が出力する前記運転用指令パラメータに基づいて、前記モータの位置を指令する時系列信号である位置指令を生成するステップと、
前記位置決め制御装置が、前記位置指令に基づき電力を供給して前記モータを駆動するステップと、
前記モータが、前記可動部を前記目標移動距離だけ移動させる前記位置決め動作を実行するステップと、
を含むことを特徴とする位置決め方法。
【請求項9】
把持部が電子部品を把持する把持工程と、
実装基板上で前記電子部品を把持した状態の前記把持部を目標移動距離だけ移動させる位置決め工程と、
前記把持部が停止した位置で前記把持部が前記電子部品を解放することで前記実装基板上に前記電子部品を配置する配置工程と、
を含み、
前記位置決め工程は、
パラメータ調整装置が、位置決め制御装置に向けて出力する運転用指令パラメータの候補である運転用指令パラメータ候補を複数生成するステップと、
前記パラメータ調整装置が、モータが可動部を目標移動距離だけ移動させる位置決め動作を試行的に実行した際の、前記位置決め制御装置、前記可動部および前記モータのうちの少なくともいずれか1つの状態を示す特徴量を含む事前データを取得するステップと、
前記パラメータ調整装置が、前記事前データを用いて、前記運転用指令パラメータから前記特徴量を推論するための学習済特徴量モデルを生成するステップと、
前記パラメータ調整装置が、複数の前記運転用指令パラメータ候補を前記学習済特徴量モデルに入力して複数の運転用指令パラメータ候補のそれぞれに対して出力される前記特徴量の予測値を特徴量予測結果として出力するステップと、
前記パラメータ調整装置が、前記特徴量予測結果に基づき複数の前記運転用指令パラメータ候補の中から1つを選択して前記位置決め制御装置が使用する運転用指令パラメータとして決定するステップと、
前記位置決め制御装置が、前記パラメータ調整装置が出力する前記運転用指令パラメータに基づいて、前記モータの位置を指令する時系列信号である位置指令を生成するステップと、
前記位置決め制御装置が、前記位置指令に基づき電力を供給して前記モータを駆動するステップと、
前記モータが、前記可動部を前記目標移動距離だけ移動させる前記位置決め動作を実行するステップと、
を含むことを特徴とする電子部品実装基板の製造方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、位置決め制御に使用するパラメータを調整するパラメータ調整装置、位置決めシステム、位置決め方法および電子部品実装基板の製造方法に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
電子部品実装機、半導体製造装置などのように、モータの駆動により制御対象の可動部であるヘッドを繰り返し移動させる装置では、生産性向上のために、モータの高速な位置決め制御が求められる。ただし、モータが高速に動作すると、機械振動が生じる場合がある。このときモータの位置指令の指令形状が適切に調整されていれば、機械振動の影響を受ける状況下であっても高速な位置決め制御が実現できる。したがって、位置指令の指令形状を適切に調整することが求められる。
【0003】
特許文献1には、指令形状を調整するための位置決め制御装置が開示されている。この位置決め制御装置は、位置指令を生成するために用いる位置指令パラメータと評価値との関係を学習し、学習結果に基づいて位置指令パラメータを決定する。具体的には、特許文献1の位置決め制御装置では、残留振動の大きさが許容値を超えたときにペナルティを与えることで、求めた最適なパラメータが制約条件を満たすようにパラメータの調整を行う。
【先行技術文献】
【特許文献】
【0004】
国際公開第2020/075316号
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記従来の技術によれば適切なパラメータへの調整が完了するまでの期間にユーザにとって好ましくないパラメータを用いてモータが動作する可能性が高いという問題があった。
【0006】
本開示は、上記に鑑みてなされたものであって、パラメータの調整が完了するまでの期間であってもユーザにとって好ましくないパラメータを用いてモータが動作する可能性を低減することが可能なパラメータ調整装置を得ることを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するために、本開示にかかるパラメータ調整装置は、可動部を目標移動距離だけ移動させる位置決め動作を実行するモータの位置を指令する時系列信号である位置指令を運転用指令パラメータに基づいて生成する指令波形生成部と、位置指令に基づき電力を供給してモータを駆動する駆動制御部とを有する位置決め制御装置に向けて運転用指令パラメータを出力するパラメータ調整装置において、運転用指令パラメータの候補である運転用指令パラメータ候補を複数生成する運転用指令パラメータ候補生成部と、試行的な位置決め動作を実行した際の、位置決め制御装置、可動部およびモータのうちの少なくともいずれか1つの状態を示す特徴量を含む事前データを取得する事前データ取得部と、を有する。また、このパラメータ調整装置は、事前データを用いて、運転用指令パラメータから特徴量を推論するための学習済特徴量モデルを生成する特徴量モデル生成部と、複数の運転用指令パラメータ候補を学習済特徴量モデルに入力して複数の運転用指令パラメータ候補のそれぞれに対して出力される特徴量の予測値を特徴量予測結果として出力する特徴量予測部と、特徴量予測結果に基づき複数の運転用指令パラメータ候補の中から1つを選択して位置指令の生成に使用する運転用指令パラメータとして決定する運転用指令パラメータ決定部と、をさらに備えることを特徴とする。
【発明の効果】
【0008】
本開示によれば、パラメータの調整が完了するまでの期間であってもユーザにとって好ましくないパラメータを用いてモータが動作する可能性を低減することが可能になるという効果を奏する。
【図面の簡単な説明】
【0009】
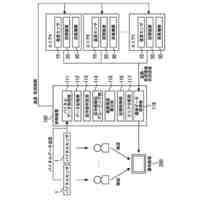
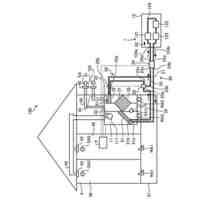
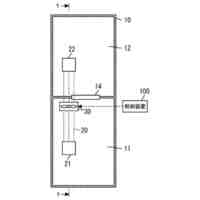
実施の形態1にかかる位置決めシステムの構成例を表す図
実施の形態1で用いられる位置指令、速度指令、加速度指令およびジャークのそれぞれの波形の一例を示す図
実施の形態1において特徴量を算出する方法の一例の説明図
図3に示す特徴量を用いる場合の運転用指令パラメータ決定部の動作の一例の説明図
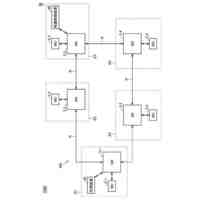
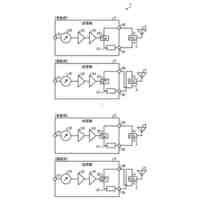
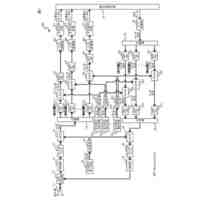
特徴量モデル生成部が使用するニューラルネットワークの一例を示す図
位置決めシステムの動作を説明するためのフローチャート
実施の形態1にかかるパラメータ調整装置の機能を実現するための専用のハードウェアを示す図
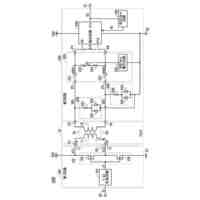
実施の形態1にかかるパラメータ調整装置の機能を実現するための制御回路の構成を示す図
位置決めシステムを用いた電子部品実装基板の製造方法を説明するためのフローチャート
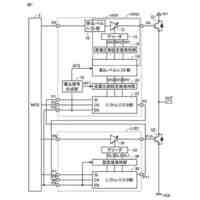
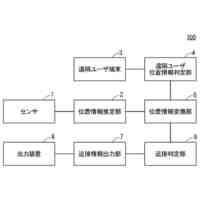
実施の形態2にかかる位置決めシステムの構成を示す図
位置決め動作の整定時間の算出方法の説明図
実施の形態2にかかる位置決めシステムの動作を説明するためのフローチャート
図12のステップS203の詳細を説明するためのフローチャート
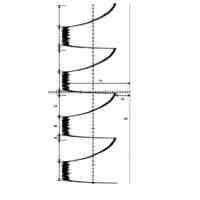
実施の形態2にかかるガウス過程回帰モデルを用いた評価値および特徴量の予測結果の一例を示す図
実施の形態3にかかる位置決めシステムの構成を示す図
実施の形態3にかかるパラメータ調整装置の動作を説明するためのフローチャート
図16のステップS302の詳細を説明するためのフローチャート
【発明を実施するための形態】
【0010】
以下に、本開示の実施の形態にかかるパラメータ調整装置、位置決めシステム、位置決め方法および電子部品実装基板の製造方法を図面に基づいて詳細に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
送風機
10日前
三菱電機株式会社
照明器具
11日前
三菱電機株式会社
電子機器
3日前
三菱電機株式会社
発光装置
18日前
三菱電機株式会社
放電装置
18日前
三菱電機株式会社
半導体装置
19日前
三菱電機株式会社
半導体装置
26日前
三菱電機株式会社
半導体装置
25日前
三菱電機株式会社
半導体装置
19日前
三菱電機株式会社
光通信装置
18日前
三菱電機株式会社
加熱調理器
12日前
三菱電機株式会社
空調システム
10日前
三菱電機株式会社
半導体製造装置
28日前
三菱電機株式会社
換気空調システム
1か月前
三菱電機株式会社
換気空調システム
1か月前
三菱電機株式会社
半導体モジュール
25日前
三菱電機株式会社
換気空調システム
1か月前
三菱電機株式会社
手持ち式電気掃除機
11日前
三菱電機株式会社
保護リレーシステム
25日前
三菱電機株式会社
アレーアンテナ装置
11日前
三菱電機株式会社
モータ及び送風装置
10日前
三菱電機株式会社
水位変化検出システム
14日前
三菱電機株式会社
拡管工具および管の拡管方法
25日前
三菱電機株式会社
空気調和機および空調システム
3日前
三菱電機株式会社
送風システム及び空調システム
19日前
三菱電機株式会社
送風システム及び空調システム
19日前
三菱電機株式会社
ベーパーチャンバー及び冷却装置
1か月前
三菱電機株式会社
バーチャルオフィス支援システム
26日前
三菱電機株式会社
信号伝達回路および電力変換装置
10日前
三菱電機株式会社
電気掃除機用吸込具及び電気掃除機
11日前
三菱電機株式会社
レーダ装置および物体位置検出方法
18日前
三菱電機株式会社
導波管アンテナおよびレーダシステム
18日前
三菱電機株式会社
移動体制御装置および移動体制御方法
18日前
三菱電機株式会社
マルチトーンレーダおよび送受信方法
28日前
三菱電機株式会社
マルチトーンレーダおよび送受信方法
28日前
三菱電機株式会社
車両管制装置および車両管制システム
14日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ