TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025029514
公報種別
公開特許公報(A)
公開日
2025-03-06
出願番号
2023134240
出願日
2023-08-21
発明の名称
作業機械の制御システム
出願人
国立大学法人広島大学
,
コベルコ建機株式会社
代理人
個人
,
個人
主分類
E02F
9/20 20060101AFI20250227BHJP(水工;基礎;土砂の移送)
要約
【課題】作業現場において複数の作業機械によって効率的に作業を行うことが可能な作業機械の制御システムを提供する。
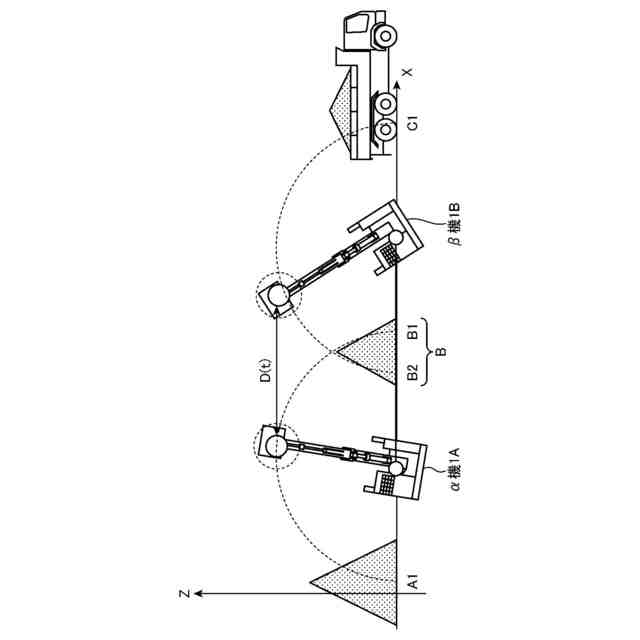
【解決手段】第1作業機械(1B)および第2作業機械(1A)の各々が作業する作業現場において、少なくとも前記第2作業機械の動作を制御する作業機械の制御システム(100)は、前記第1作業機械と前記第2作業機械とにおける機械同士の干渉および作業同士の干渉のうちの少なくとも一方の干渉が発生することを防止するように、前記第1作業機械の動きに応じて前記第2作業機械が協調して動作するための指令信号を生成する制御部(50)を備える。
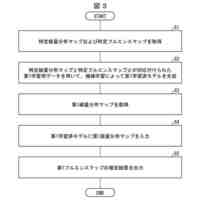
【選択図】図2
特許請求の範囲
【請求項1】
第1作業機械および第2作業機械が作業する作業現場において、少なくとも前記第2作業機械の動作を制御する作業機械の制御システムであって、
前記第1作業機械と前記第2作業機械とにおける機械同士の干渉および作業同士の干渉のうちの少なくとも一方の干渉が発生することを防止するように、前記第1作業機械の動きに応じて前記第2作業機械が協調して動作するための指令信号を生成する制御部を備える、作業機械の制御システム。
続きを表示(約 1,100 文字)
【請求項2】
前記制御部は、前記第1作業機械および前記第2作業機械の相互の動作状況に基づいて前記指令信号を生成する、請求項1に記載の作業機械の制御システム。
【請求項3】
前記動作状況は、前記第1作業機械および前記第2作業機械の相対的な位置関係を含む、請求項2に記載の作業機械の制御システム。
【請求項4】
前記第1作業機械の第1特定部位の位置情報を取得する第1位置情報取得部と、
前記第2作業機械の第2特定部位の位置情報を取得する第2位置情報取得部と、
を更に備え、
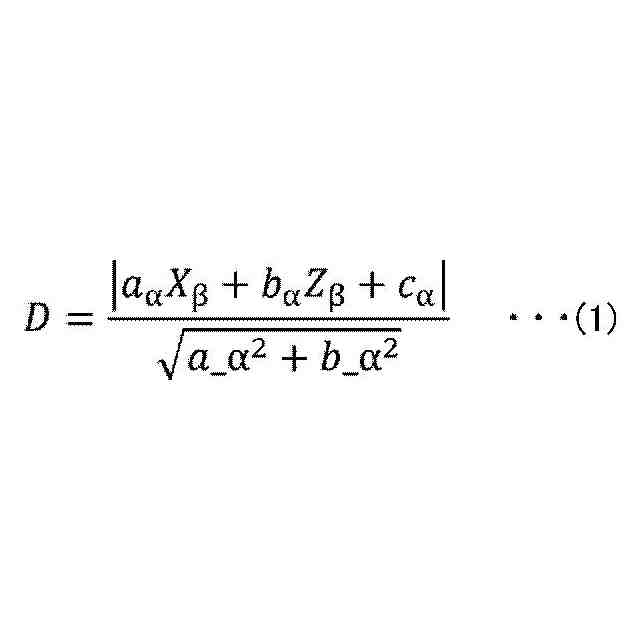
前記制御部は、前記第1位置情報取得部および前記第2位置情報取得部の取得結果に基づいて、前記第1特定部位と前記第2特定部位との距離を演算し、当該演算された距離が予め設定された閾値を下回らないように前記指令信号を生成する、請求項3に記載の作業機械の制御システム。
【請求項5】
前記動作状況は、前記第1作業機械および前記第2作業機械の動作速度を含む、請求項2に記載の作業機械の制御システム。
【請求項6】
前記動作状況は、前記第1作業機械および前記第2作業機械の作業内容を含む、請求項2に記載の作業機械の制御システム。
【請求項7】
前記第1作業機械は、入力される第1作業計画に沿って動作することが可能であり、
前記第2作業機械は、入力される第2作業計画に沿って動作することが可能であり、
前記制御部は、予め設定された前記第1作業計画および前記第2作業計画に基づいて、前記第1作業機械と前記第2作業機械とにおける機械同士の干渉および作業同士の干渉のうちの少なくとも一方の干渉が発生することを防止するように、前記第2作業計画を修正するための前記指令信号を生成し、修正された前記第2作業計画を前記第2作業機械に入力する、請求項1に記載の作業機械の制御システム。
【請求項8】
前記制御部は、前記第1作業計画および前記第2作業計画に基づいて前記第1作業機械および前記第2作業機械の各々の動作を事前予測し、当該事前予測の結果から前記第1作業機械と前記第2作業機械とが干渉するか否かを判定し、当該判定結果に応じて前記指令信号を生成する、請求項7に記載の作業機械の制御システム。
【請求項9】
前記制御部は、前記第1作業機械と前記第2作業機械との干渉を回避するために、前記第2作業計画の少なくとも一部に遅延時間を設定する、請求項7に記載の作業機械の制御システム。
【請求項10】
前記制御部は、前記遅延時間が予め設定された時間閾値を上回った場合に、前記時間閾値に対応する別作業を前記第2作業計画に追加する、請求項9に記載の作業機械の制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械の制御システムに関するものである。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、機体と、前記機体に起伏可能に支持された作業アタッチメントとを備えた作業機械が知られている。例えば、前記作業アタッチメントは、ブームと、アームと、バケットとを含む。特許文献1には、このような作業機械を自動運転機として自動制御する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-131004号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような作業機械の自動運転機を作業現場に適用することによって、生産性を向上することができる。例えば、自動運転機は、予め決められたエリアで動作するような単純作業を行うことができる。この結果、手が空いた操縦者は、自動運転機の動作に並行して他の作業を行うことができる。
【0005】
多くの作業現場では、土を運ぶ等の作業時に、複数の作業機械同士が互いに近接した位置関係で動作することがある。仮に、これらの作業機械がいずれも人によって操作される場合は、互いに相手の作業機械の動きを見ながら、自らの作業を止めることなく操作することができる。しかしながら、特許文献1に記載されたような自動運転機は、予め決められた作業計画に沿って動作するため、周辺の作業機械が予期せずに近づいた場合、両者が接触、干渉する可能性が生じてしまう。これに対して、例えば作業機械が干渉防止機能を有していたとしても、それぞれの機械が周辺の作業機械の作業計画を考慮せずに動作すると、作業そのものが干渉する状況になる場合がある。そのような状況では、作業機械が動作を停止してしまい、結果として生産性が低下するという問題がある。
【課題を解決するための手段】
【0006】
本発明の目的は、作業現場において複数の作業機械によって効率的に作業を行うことが可能な作業機械の制御システムを提供することにある。
【0007】
本発明の第1の局面によって提供されるのは、第1作業機械および第2作業機械が作業する作業現場において、少なくとも前記第2作業機械の動作を制御する作業機械の制御システムである。当該制御システムは、前記第1作業機械と前記第2作業機械とにおける機械同士の干渉および作業同士の干渉のうちの少なくとも一方の干渉が発生することを防止するように、前記第1作業機械の動きに応じて前記第2作業機械が協調して動作するための指令信号を生成する制御部を備える。
【0008】
本構成によれば、協調側の第2作業機械の動作を最適化することで、機械同士が接触すること、又は、作業同士が干渉することを防止しながら効率的な作業を行うことができる。
【0009】
本発明の第2の局面に係る発明は、上記の第1の局面に係る発明において、前記制御部は、前記第1作業機械および前記第2作業機械の相互の動作状況に基づいて前記指令信号を生成するものでもよい。
【0010】
本構成によれば、協調側の第2作業機械の動作を最適化することで、機械同士が接触することを防止しながら効率的な作業を行うことができる。特に、実際の動作状況を見ながら第2作業機械の動作を最適化、修正することができるため、作業開始後に生じた遅延要因による、制御バラツキの発生を抑制することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人広島大学
直腸生検補助具
4か月前
国立大学法人広島大学
生体触媒の製造方法
1日前
国立大学法人広島大学
作業機械の操作システム
29日前
国立大学法人広島大学
作業機械の油圧制御装置
1か月前
国立大学法人広島大学
肺高血圧症の治療用組成物
4か月前
愛三工業株式会社
吸着装置
8日前
国立大学法人広島大学
二酸化炭素吸着材の製造方法
1か月前
株式会社大林組
土壌改良方法
3か月前
株式会社大林組
CO2固定量測定方法
2か月前
国立大学法人秋田大学
癌細胞増殖抑制剤
2か月前
国立大学法人広島大学
細胞デバイスおよびインスリン分泌制御方法
21日前
株式会社大林組
セメント組成物の製造方法
3か月前
国立大学法人広島大学
画像処理装置、画像処理方法およびプログラム
1か月前
国立大学法人広島大学
心理特性推定システムおよび作業管理システム
1か月前
三建産業株式会社
工業炉
4か月前
国立大学法人広島大学
入出力予測方法、制御器の設計方法及び制御方法
4か月前
JFEスチール株式会社
情報処理装置及び方法
2か月前
国立大学法人広島大学
二酸化炭素分離膜の製造方法及び二酸化炭素分離膜
4か月前
国立大学法人広島大学
地震危険度評価装置、地震危険度評価方法及びプログラム
21日前
国立大学法人広島大学
雌の抗老化剤
1か月前
国立大学法人広島大学
共役系重合体、電子供与性有機材料、光起電力素子用材料および光起電力素子
1か月前
デンカ株式会社
熱電変換用p型材料及びその製造方法、並びに熱電変換素子
21日前
国立大学法人広島大学
地震危険度評価装置、地震危険度評価方法及びプログラム
21日前
国立大学法人広島大学
ライトフィールド三次元トラッキング制御装置、方法およびプログラムならびにライトフィールド顕微鏡システム
2か月前
学校法人東海大学
トランスフェリンレセプターを認識する物質を含む治療剤の用法用量
1か月前
マツダ株式会社
発泡樹脂成形品の気泡成長予測方法、気泡成長予測装置、気泡成長予測プログラム、及び記録媒体
2か月前
マツダ株式会社
発泡樹脂成形品の気泡成長予測方法、気泡成長予測装置、気泡成長予測プログラム、及び記録媒体
2か月前
マツダ株式会社
発泡樹脂成形品の気泡成長予測方法、気泡成長予測装置、気泡成長予測プログラム、及び記録媒体
2か月前
マツダ株式会社
発泡樹脂成形品の気泡成長予測方法、気泡成長予測装置、気泡成長予測プログラム、及び記録媒体
2か月前
国立大学法人広島大学
フルエンスマップの推定方法および推定モデルの生成方法、学習済モデル、フルエンスマップの推定システム、制御プログラムおよび記録媒体
3か月前
住友化学株式会社
逆転写酵素、DNA編集システム、並びに、これらを用いて標的DNAを編集する方法及び標的DNAが編集された細胞を製造する方法
今日
個人
バケット
29日前
個人
建物の不同沈下の修正方法
1か月前
鹿島建設株式会社
接続方法
9日前
株式会社大林組
操縦装置
1か月前
千代田工営株式会社
回転貫入杭
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ