TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025032423
公報種別
公開特許公報(A)
公開日
2025-03-12
出願番号
2023137677
出願日
2023-08-28
発明の名称
画像解析装置、画像解析方法及びプログラム
出願人
国立大学法人広島大学
代理人
個人
主分類
G06V
10/62 20220101AFI20250305BHJP(計算;計数)
要約
【課題】広範囲で飛翔する飛翔体の種類を精度よく判別することができる画像解析装置、画像解析方法及びプログラムを提供する。
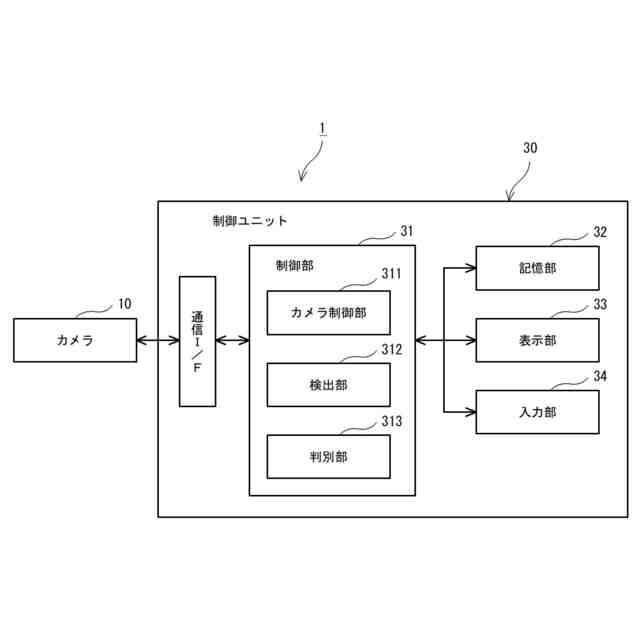
【解決手段】画像解析装置1は、時系列の画像から飛翔体を検出し、飛翔体の変位の時間変化である第1変位信号を生成する検出部312と、第1変位信号に基づいて飛翔体の種類を判別する判別部313と、を備える。検出部312は、飛翔体の幾何中心の変位を、飛翔体の変位として第1変位信号を生成する。判別部313は、第1変位信号を経験的モード分解で分解し、予め定められた閾値以下の数の固有モード関数を統合することにより、飛翔体の羽ばたきに係る変位を表す第2変位信号を生成し、第2変位信号を周波数解析することにより、飛翔体の種類を判別する。
【選択図】図1
特許請求の範囲
【請求項1】
時系列の画像から飛翔体を検出し、前記飛翔体の変位の時間変化である第1変位信号を生成する検出部と、
前記第1変位信号に基づいて前記飛翔体の種類を判別する判別部と、を備え、
前記検出部は、
前記飛翔体の幾何中心の変位を、前記飛翔体の変位として前記第1変位信号を生成し、
前記判別部は、
前記第1変位信号を経験的モード分解で分解し、予め定められた閾値以下の数の固有モード関数を統合することにより、前記飛翔体の羽ばたきに係る変位を表す第2変位信号を生成し、
前記第2変位信号を周波数解析することにより、前記飛翔体の種類を判別する、
ことを特徴とする画像解析装置。
続きを表示(約 1,300 文字)
【請求項2】
前記検出部は、
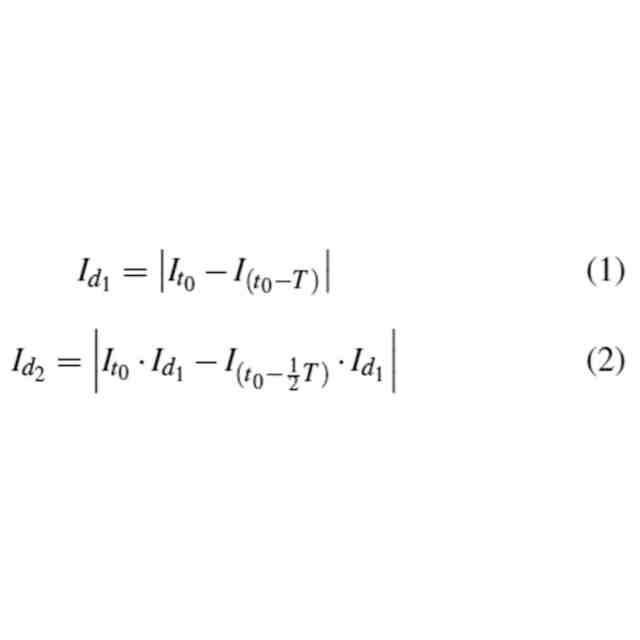
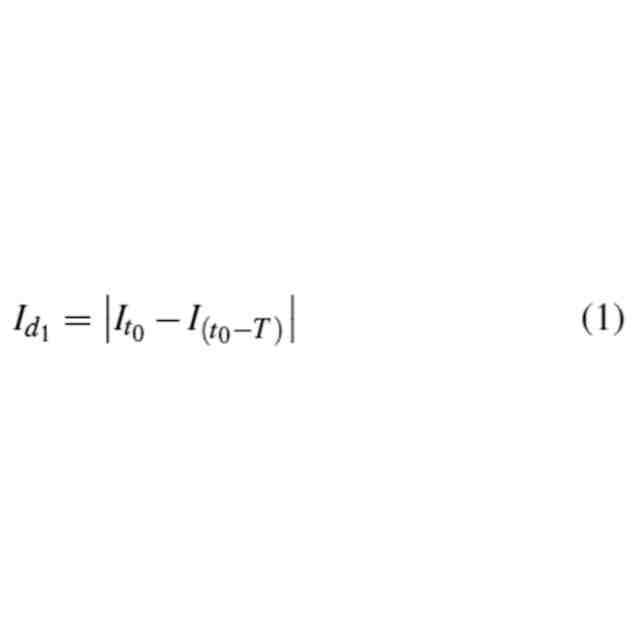
前記時系列の画像において、所定の時間間隔の第1フレーム画像及び第2フレーム画像と、前記第1フレーム画像と前記第2フレーム画像との中間フレーム画像とを用いて以下の式で表わされる第1前景画像及び第2前景画像を演算し、
JPEG
2025032423000026.jpg
33
170
ただし、t
0
は現在時刻、Tは調整可能な遅延時間、I
t0
は第1フレーム画像、I
(t0-T)
は第2フレーム画像、I
(t0-1/2・T)
は中間フレーム画像、I
d1
は第1前景画像、I
d2
は第2前景画像を表す。
前記第1前景画像と前記第2前景画像との積によって前記飛翔体を表す領域を抽出して、前記飛翔体を検出する、
ことを特徴とする請求項1に記載の画像解析装置。
【請求項3】
前記検出部は、
前記飛翔体を表す領域を膨張演算した後、前記膨張演算より小さなカーネルで収縮演算して、前記飛翔体を検出する、
ことを特徴とする請求項2に記載の画像解析装置。
【請求項4】
前記判別部は、
前記第2変位信号をフーリエ変換して周波数スペクトルを算出し、算出された周波数スペクトルに基づくパターンマッチングによって前記飛翔体の種類を判別する、
ことを特徴とする請求項1から3のいずれか一項に記載の画像解析装置。
【請求項5】
前記判別部は、
前記第2変位信号を連続ウェーブレット変換して、ピーク周波数におけるパワーの時間変化を演算し、前記ピーク周波数におけるパワーの時間変化を表す信号を所定の閾値で二値化して生成された二値信号のデューティ比を算出し、
算出された前記デューティ比と前記ピーク周波数とに基づく分類によって前記飛翔体の種類を判別する、
ことを特徴とする請求項1から3のいずれか一項に記載の画像解析装置。
【請求項6】
時系列の画像から飛翔体を検出し、前記飛翔体の幾何中心の変位の時間変化である第1変位信号を生成し、
前記第1変位信号を経験的モード分解で分解し、予め定められた閾値以下の数の固有モード関数を統合することにより、前記飛翔体の羽ばたきに係る変位を表す第2変位信号を生成し、
前記第2変位信号を周波数解析することにより、前記飛翔体の種類を判別する、
ことを特徴とする画像解析方法。
【請求項7】
コンピュータを、
時系列の画像から飛翔体を検出し、前記飛翔体の幾何中心の変位の時間変化である第1変位信号を生成する検出部、
前記第1変位信号を経験的モード分解で分解し、予め定められた閾値以下の数の固有モード関数を統合することにより、前記飛翔体の羽ばたきに係る変位を表す第2変位信号を生成し、
前記第2変位信号を周波数解析することにより、前記飛翔体の種類を判別する判別部、
として機能させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、画像解析装置、画像解析方法及びプログラムに関し、より詳細には鳥、昆虫等の飛翔体の種類を判別する画像解析装置、画像解析方法及びプログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
鳥獣被害は、多くの経済的損失につながるため、農業従事者にとって重要な課題とされている。例えば、野菜や果実を生産する農家においては、鳥の被害によって、収穫高の減少による損失が生じている。こうした鳥獣被害への対応を行う場合、鳥の数量、種類によって有効な対応が異なるので、飛来する鳥の数量の把握、種類の判別が重要となる。また、害虫対策のための昆虫の飛来状況、養蜂における蜜蜂の飛来状況等を把握したいという、ニーズもある。
【0003】
例えば、特許文献1では、撮影された連続画像から鳥類の翼の軌跡を得て、軌跡に基づいた羽ばたきの深さ、ピッチ、単位時間あたりの羽ばたきの回数等に基づいて、撮影された鳥が大型猛禽類であるか否か判定することとしている。
【0004】
また、特許文献2では、ドローンを用いて収集した画像及び音データから得られた鳥獣類の大きさ、体形、色、鳴き声、動作等に基づいて鳥獣類を推定することとしている。
【先行技術文献】
【特許文献】
【0005】
特開2021-60694号公報
特開2021-40519号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1のように、撮影された画像に基づいて飛翔する鳥を判別する場合、飛翔する鳥の動きを常に捉える高解像度画像を取得することは難しい。したがって、大型猛禽類であるか否かといった特定の種類の飛翔体の判定のみならず、飛翔体の種類を精度よく識別することは難しい。
【0007】
また、特許文献2のようにドローンを用いて画像及び音データを収集する場合、長時間、連続してデータを収集することは難しい。また、マイクの空間指向性は低いので、離れた場所から広範囲について鳥獣類の正確な位置を特定することは難しい。したがって、音声ノイズが大きい場合、対象となる範囲に複数の鳥獣類が存在する場合等においては、鳥獣類の推定を行うことは難しい。
【0008】
本発明は、上述の事情に鑑みてなされたものであり、広範囲で飛翔する飛翔体の種類を精度よく判別することができる画像解析装置、画像解析方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために、この発明の第1の観点に係る画像解析装置は、
時系列の画像から飛翔体を検出し、前記飛翔体の変位の時間変化である第1変位信号を生成する検出部と、
前記第1変位信号に基づいて前記飛翔体の種類を判別する判別部と、を備え、
前記検出部は、
前記飛翔体の幾何中心の変位を、前記飛翔体の変位として前記第1変位信号を生成し、
前記判別部は、
前記第1変位信号を経験的モード分解で分解し、予め定められた閾値以下の数の固有モード関数を統合することにより、前記飛翔体の羽ばたきに係る変位を表す第2変位信号を生成し、
前記第2変位信号を周波数解析することにより、前記飛翔体の種類を判別する。
【0010】
また、前記検出部は、
前記時系列の画像において、所定の時間間隔の第1フレーム画像及び第2フレーム画像と、前記第1フレーム画像と前記第2フレーム画像との中間フレーム画像とを用いて以下の式で表わされる第1前景画像及び第2前景画像を演算し、
JPEG
2025032423000002.jpg
33
170
ただし、t
0
は現在時刻、Tは調整可能な遅延時間、I
t0
は第1フレーム画像、I
(t0-T)
は第2フレーム画像、I
(t0-1/2・T)
は中間フレーム画像、I
d1
は第1前景画像、I
d2
は第2前景画像を表す。
前記第1前景画像と前記第2前景画像との積によって前記飛翔体を表す領域を抽出して、前記飛翔体を検出する、
こととしてもよい。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人広島大学
腸内菌叢改善剤
3か月前
国立大学法人広島大学
直腸生検補助具
1か月前
国立大学法人広島大学
水素の製造方法
3か月前
国立大学法人広島大学
ゴム組成物の製造方法
2か月前
国立大学法人広島大学
肺高血圧症の治療用組成物
1か月前
株式会社明治
分析システム
3か月前
株式会社大林組
土壌改良方法
1か月前
国立大学法人広島大学
嚥下能力評価装置及びプログラム
5か月前
国立大学法人広島大学
作業支援システムおよび作業支援方法
4か月前
国立大学法人広島大学
難水溶性化合物の細胞外小胞搭載方法
3か月前
国立大学法人広島大学
作業支援システムおよび作業支援方法
4か月前
国立大学法人広島大学
作業支援システムおよび作業支援方法
4か月前
国立大学法人広島大学
作業支援システムおよび作業支援方法
4か月前
国立大学法人広島大学
生体情報測定器及び生体情報の測定方法
4か月前
株式会社大林組
CO2固定量測定方法
1日前
三菱ケミカル株式会社
アミンの検出方法
4か月前
国立大学法人広島大学
枯草菌並びにそれを含む食品および発酵物
2か月前
株式会社大林組
セメント組成物の製造方法
3か月前
国立大学法人広島大学
流体解析方法、流体解析装置及びプログラム
3か月前
株式会社大林組
セメント組成物の製造方法
14日前
フジクリーン工業株式会社
発泡ガラス複合材料
4か月前
大陽日酸株式会社
膜分離装置および膜分離方法
4か月前
三建産業株式会社
工業炉
1か月前
国立大学法人広島大学
入出力予測方法、制御器の設計方法及び制御方法
1か月前
国立大学法人広島大学
植物生育環境評価装置及び植物生育環境評価方法
3か月前
国立大学法人広島大学
尿管ステント抜去器具及び尿管ステント抜去方法
3か月前
国立大学法人広島大学
二酸化炭素分離膜の製造方法及び二酸化炭素分離膜
1か月前
国立大学法人広島大学
有彩色フリッカの不快感評価方法及び不快感評価装置
2か月前
トヨタ自動車株式会社
油膜付燃料及び非混和性油脂
3か月前
キユーピー株式会社
オボムコイドを含まない殻付き鶏卵の選別方法
3か月前
国立大学法人広島大学
水溶性タンパク質内包用のホウ素ナノキャリア及びホウ素ナノキャリア複合体
5か月前
大阪瓦斯株式会社
シスプラチンに起因する腎障害の予防のための経口投与用の組成物
5か月前
国立大学法人広島大学
多柱コンプトンカメラおよびガンマ線イベントデータ解析装置、方法およびプログラム
4か月前
国立大学法人広島大学
分散型データアグリゲーション方法および分散型データアグリゲーションフレームワーク
4か月前
国立大学法人広島大学
AIによる事象クラスの判別方法及び判別システム
2か月前
国立大学法人広島大学
薬効推定方法、薬効推定モデルの生成方法、薬効推定システム、制御プログラム、記録媒体および学習済モデル
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ