TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025029515
公報種別
公開特許公報(A)
公開日
2025-03-06
出願番号
2023134241
出願日
2023-08-21
発明の名称
作業機械の制御システム
出願人
国立大学法人広島大学
,
コベルコ建機株式会社
代理人
個人
,
個人
主分類
E02F
9/20 20060101AFI20250227BHJP(水工;基礎;土砂の移送)
要約
【課題】作業現場において複数の作業機械によって効率的に作業を行うことが可能な作業機械の制御システムを提供する。
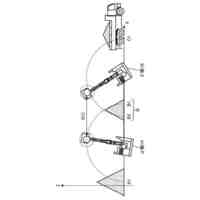
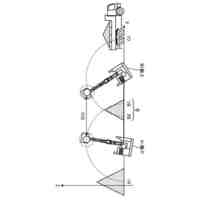
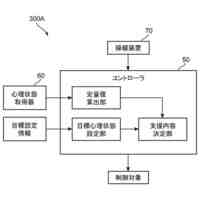
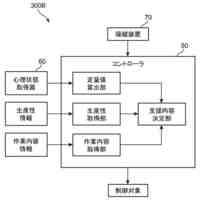
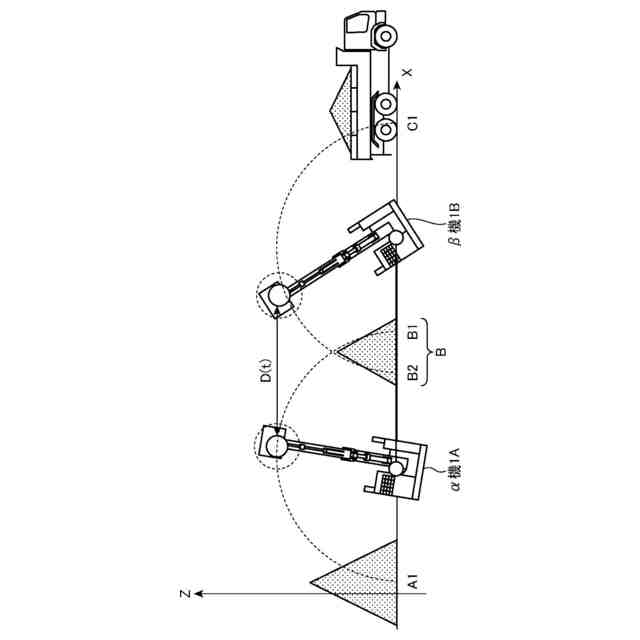
【解決手段】第1作業機械(1A)および第2作業機械(1B)の各々が作業する作業現場において、少なくとも前記第2作業機械の動作を制御する作業機械の制御システム(100)は、前記第1作業機械と前記第2作業機械とが干渉することを防止するように、前記第1作業機械の動きに応じて前記第2作業機械が協調して動作するための指令信号を生成する制御部(50)を備える。指令信号の生成には、第1特定部位と第2特定部位との間に仮想的に設定されたばねダンパの特性に関する特性情報が用いられる。
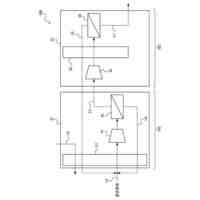
【選択図】図2
特許請求の範囲
【請求項1】
第1作業機械および第2作業機械が作業する作業現場において、少なくとも前記第2作業機械の動作を制御する作業機械の制御システムであって、
前記第1作業機械と前記第2作業機械とにおける機械同士の干渉および作業同士の干渉のうちの少なくとも一方の干渉が発生することを防止するように、前記第1作業機械の動きに応じて前記第2作業機械が協調して動作するための指令信号を生成する制御部を備え、
前記制御部は、少なくとも前記第1作業機械の動きに関する動作情報に基づいて、前記第1作業機械の第1特定部位と前記第2作業機械の第2特定部位との間の距離に応じて変位するように前記第1特定部位と前記第2特定部位との間に仮想的に設定されたばねダンパの特性に関する特性情報と、前記第2作業機械を制御するための制御パラメータとを決定し、決定された前記特性情報と前記制御パラメータとに基づいて前記指令信号を生成する、作業機械の制御システム。
続きを表示(約 490 文字)
【請求項2】
前記制御部は、前記動作情報と、予め設定された前記第2作業機械の動きを停止させるための自動停止情報とに基づいて、前記特性情報と前記制御パラメータとを決定する、請求項1に記載の作業機械の制御システム。
【請求項3】
前記第1作業機械の動きに対応する基準動作情報と、前記特性情報に対応する基準特性情報と、前記制御パラメータに対応する基準制御パラメータとを互いに関連付けて予め記憶するデータベースを更に備え、
前記制御部は、現在の前記第1作業機械の前記動作情報である入力情報を前記データベースに入力し、前記入力情報に対応する前記基準動作情報を特定し、当該特定した基準動作情報に対応する前記基準特性情報および前記基準制御パラメータを用いて前記指令信号を生成する、請求項1または2に記載の作業機械の制御システム。
【請求項4】
前記第1作業機械は搭乗した操作者によって操作され動作するもの、または、遠隔制御によって動作するものであり、前記第2作業機械は自動制御によって動作するものである、請求項1または2に記載の作業機械の制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械の制御システムに関するものである。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、機体と、前記機体に起伏可能に支持された作業アタッチメントとを備えた作業機械が知られている。例えば、前記作業アタッチメントは、ブームと、アームと、バケットとを含む。特許文献1には、このような作業機械を自動運転機として自動制御する技術が開示されている。
【0003】
このような作業機械の自動運転機を作業現場に適用することによって、生産性を向上することができる。例えば、自動運転機は、予め決められたエリアで動作するような単純作業を行うことができる。この結果、手が空いた操縦者は、自動運転機の動作に並行して他の作業を行うことができる。
【先行技術文献】
【特許文献】
【0004】
特開2021-131004号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
多くの作業現場では、土を運ぶ等の作業時に、複数の作業機械同士が互いに近接した位置関係で動作することがある。仮に、これらの作業機械がいずれも人によって操作される場合は、互いに相手の作業機械の動きを見ながら、自らの作業を止めることなく操作することができる。しかしながら、特許文献1に記載されたような自動運転機は、予め決められた作業計画に沿って動作するため、周辺の作業機械が予期せずに近づいた場合、両者が接触、干渉する可能性が生じてしまう。
【0006】
本発明の目的は、作業現場において複数の作業機械によって効率的に作業を行うことが可能な作業機械の制御システムを提供することにある。
【課題を解決するための手段】
【0007】
本発明の第1の局面によって提供されるのは、第1作業機械および第2作業機械が作業する作業現場において、少なくとも前記第2作業機械の動作を制御する作業機械の制御システムであって、前記第1作業機械と前記第2作業機械とにおける機械同士の干渉および作業同士の干渉のうちの少なくとも一方の干渉が発生することを防止するように、前記第1作業機械の動きに応じて前記第2作業機械が協調して動作するための指令信号を生成する制御部を備え、前記制御部は、少なくとも前記第1作業機械の動きに関する動作情報に基づいて、前記第1作業機械の第1特定部位と前記第2作業機械の第2特定部位との間の距離に応じて変位するように前記第1特定部位と前記第2特定部位との間に仮想的に設定されたばねダンパの特性に関する特性情報と、前記第2作業機械を制御するための制御パラメータとを決定し、決定された前記特性情報と前記制御パラメータとに基づいて前記指令信号を生成する。
【0008】
本構成によれば、協調側の第2作業機械の動作を最適化することで、機械同士が接触すること、又は、作業同士が干渉することを防止しながら効率的な作業を行うことができる。
【0009】
本発明の第2の局面に係る制御システムは、上記の第1の局面に係る制御システムにおいて、前記制御部は、前記動作情報と、予め設定された前記第2作業機械の動きを停止させるための自動停止情報とに基づいて、前記特性情報と前記制御パラメータとを決定するものでもよい。
【0010】
本構成によれば、予め第2作業機械の動きを停止させるための停止情報を考慮して、特性情報および制御パラメータが決定されるため、第1作業機械と第2作業機械との干渉を高い精度で防止することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人広島大学
舌保持装置
7か月前
国立大学法人広島大学
直腸生検補助具
1か月前
国立大学法人広島大学
腸内菌叢改善剤
3か月前
国立大学法人広島大学
水素の製造方法
3か月前
国立大学法人広島大学
ゴム組成物の製造方法
2か月前
国立大学法人広島大学
モデル誤差抑制補償器
6か月前
国立大学法人広島大学
作業機械の制御システム
6か月前
国立大学法人広島大学
作業機械の制御システム
6か月前
国立大学法人広島大学
多胎動物の人工授精方法
7か月前
国立大学法人広島大学
肺高血圧症の治療用組成物
1か月前
株式会社明治
分析システム
3か月前
株式会社大林組
土壌改良方法
1か月前
国立大学法人広島大学
メタン発酵菌叢の馴化培養方法
6か月前
国立大学法人広島大学
嚥下能力評価装置及びプログラム
5か月前
国立大学法人広島大学
作業支援システムおよび作業支援方法
4か月前
国立大学法人広島大学
作業支援システムおよび作業支援方法
4か月前
国立大学法人広島大学
作業支援システムおよび作業支援方法
4か月前
国立大学法人広島大学
難水溶性化合物の細胞外小胞搭載方法
3か月前
国立大学法人広島大学
作業支援システムおよび作業支援方法
4か月前
株式会社大林組
CO2固定量測定方法
1日前
国立大学法人広島大学
生体情報測定器及び生体情報の測定方法
4か月前
国立大学法人広島大学
枯草菌並びにそれを含む食品および発酵物
2か月前
三菱ケミカル株式会社
アミンの検出方法
4か月前
アース製薬株式会社
口内炎発症抑制組成物
5か月前
国立大学法人広島大学
流体解析方法、流体解析装置及びプログラム
3か月前
国立大学法人広島大学
画像解析装置、画像解析方法及びプログラム
5か月前
株式会社大林組
セメント組成物の製造方法
14日前
株式会社大林組
セメント組成物の製造方法
3か月前
国立大学法人広島大学
植物生育環境評価装置及び植物生育環境評価方法
3か月前
国立大学法人広島大学
入出力予測方法、制御器の設計方法及び制御方法
1か月前
三建産業株式会社
工業炉
1か月前
大陽日酸株式会社
膜分離装置および膜分離方法
4か月前
国立大学法人広島大学
尿管ステント抜去器具及び尿管ステント抜去方法
3か月前
フジクリーン工業株式会社
発泡ガラス複合材料
4か月前
国立大学法人広島大学
二酸化炭素分離膜の製造方法及び二酸化炭素分離膜
1か月前
国立大学法人広島大学
有彩色フリッカの不快感評価方法及び不快感評価装置
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ