TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025028137
公報種別
公開特許公報(A)
公開日
2025-02-28
出願番号
2024216470,2023064308
出願日
2024-12-11,2015-10-27
発明の名称
ロボット、駆動装置、物品の製造方法、制御方法、制御プログラム、記録媒体
出願人
キヤノン株式会社
代理人
弁理士法人近島国際特許事務所
主分類
B25J
19/02 20060101AFI20250220BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットアームの関節で他軸干渉により生じたセンサの検出誤差を補正し、当該の関節の駆動軸周りに働く力を正確に検出する。
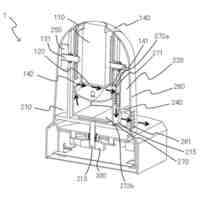
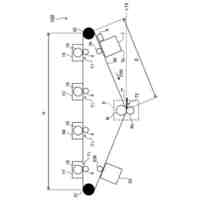
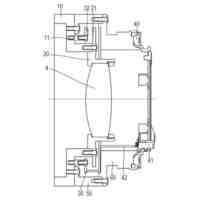
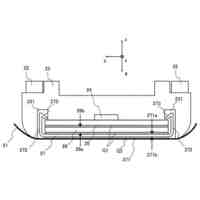
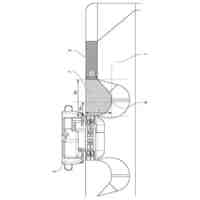
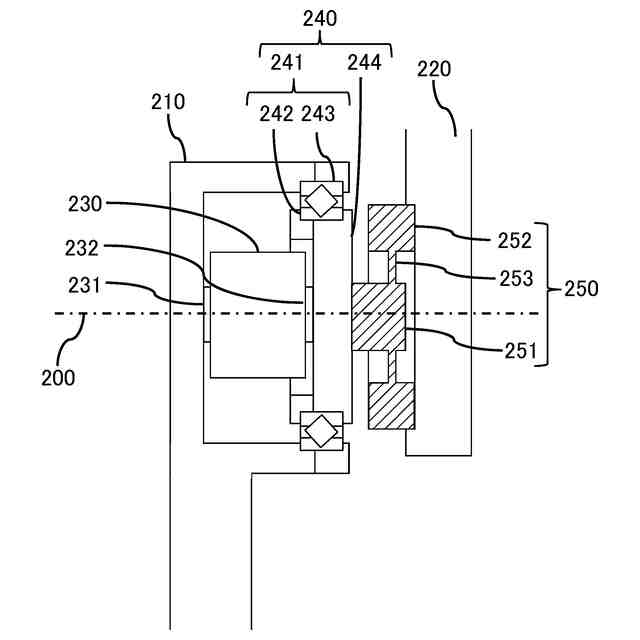
【解決手段】ロボットアームのリンク210、220を連結する関節構造において、リンク間に作用する力を求めるためのセンサ250を備える。関節の駆動力を発生する駆動装置230は、第1および第2の駆動部231、232を有する。関節の駆動方向には運動可能に、かつ他方向には運動不可能に拘束する拘束部241は、関節の駆動方向に対して相対変位可能な第1および第2の支持部242、243を有する。駆動装置230の駆動部231はリンク210に固定され、拘束部241の支持部243はリンク210に固定される。また、拘束部241の支持部242は駆動装置の駆動部232に固定される。センサ250は、支持部242およびリンク220の間を結合するよう固定される。
【選択図】図2
特許請求の範囲
【請求項1】
第1リンクを変位させる第1関節と、
前記第1関節が駆動する第1駆動方向において発生する負荷を取得する第1センサと、
制御部と、を備えたロボットであって、
前記制御部が、
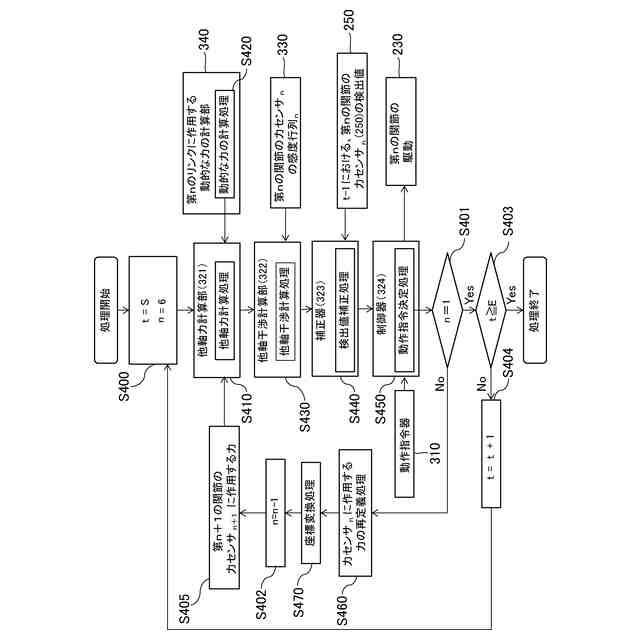
前記第1リンクに関する静的な情報と、前記第1リンクに関する動的な情報と、に基づき、前記第1センサで取得される負荷に影響を与える、前記第1駆動方向以外の方向において発生する負荷を計算し、
前記第1駆動方向以外の方向において発生する負荷に基づき、前記第1センサによって取得された負荷を補正する、
ことを特徴とするロボット。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載のロボットにおいて、
前記第1リンクに関する静的な情報は、前記第1リンクの形状に関する情報を含む、
ことを特徴とするロボット。
【請求項3】
請求項1または2に記載のロボットにおいて、
前記第1リンクに関する静的な情報は、前記第1リンクの慣性、前記第1リンクの弾性、前記第1リンクの姿勢、を含む、
ことを特徴とするロボット。
【請求項4】
請求項1から3のいずれか1項に記載のロボットにおいて、
前記第1リンクに関する動的な情報は、前記第1リンクの速度、前記第1リンクの加速度、を含む、
ことを特徴とするロボット。
【請求項5】
請求項1から4のいずれか1項に記載のロボットにおいて、
前記第1駆動方向以外の方向において発生する負荷は、モーメント成分または並進力成分を含む、
ことを特徴とするロボット。
【請求項6】
請求項1から5のいずれか1項に記載のロボットにおいて、
前記制御部は、
前記第1センサで取得された負荷を補正することで、前記第1センサで取得された負荷の精度を向上させる、
ことを特徴とするロボット。
【請求項7】
請求項1から6のいずれか1項に記載のロボットにおいて、
前記制御部は、
前記第1センサの感度行列と、前記第1駆動方向以外の方向において発生する負荷に基づき、前記第1センサによって取得された負荷に含まれる誤差を取得する、
ことを特徴とするロボット。
【請求項8】
請求項7に記載のロボットにおいて、
前記制御部は、
前記第1センサによって取得された負荷から、前記誤差を差し引くことで、前記第1センサによって取得された負荷を補正する、
ことを特徴とするロボット。
【請求項9】
請求項1から8のいずれか1項に記載のロボットにおいて、
前記第1リンクに接続され、前記第1関節により前記第1リンクを変位させることで、前記第1リンクと共に変位する第2関節と、
前記第2関節が駆動する第2駆動方向において発生する負荷を取得する第2センサと、を備え、
前記制御部は、
前記第2センサで取得された負荷に基づき、前記第1駆動方向以外の方向において発生する負荷によって前記第1駆動方向に発生する負荷を取得する、
ことを特徴とするロボット。
【請求項10】
請求項9に記載のロボットにおいて、
前記第1センサで取得される負荷は、前記第1関節の回転により発生するトルクであり、
前記第2センサで取得される負荷は、前記第2関節の回転により発生するトルクである、
ことを特徴とするロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、連結するリンクに作用する力を測定する力センサを備えたロボットアームの関節構造、ロボット装置の測定方法、およびロボット装置の制御方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
近年、様々な工業製品の生産ラインで、多関節ロボットが利用されるようになってきた。しかしながら、多関節ロボットでは実現が困難な工程も数多く存在する。例えば、自動車部品などを組み立てる生産ラインにおいて、特に数百グラムから数キログラムの荷重が部品に加わるような工程には、多関節ロボットが広く用いられている。これに対して、柔軟物、軽量物、あるいは低強度部材などから成るワークの組付けなど、部品に与える荷重が数グラム程度であることを要求されるような工程や、精密嵌合を行う工程を多関節ロボットで実現するには種々の困難がある。
【0003】
このように多関節ロボットで実現が困難な工程では、今のところ、多関節ロボットの代りにその工程に特有の専用装置や専用治具が用られている。しかし、このような専用装置や専用治具は、特定の工程、あるいは取り扱うワークのために専用に設計、製造されるものであり、実際にこの種の装置や治具が用意され、例えば生産ラインが稼働するまでに、多大な時間とコストがかかる問題がある。
【0004】
そこで、専用装置や専用治具を用いることなく、汎用的な多関節ロボットを用いて、上述のような柔軟物、軽量物、あるいは低強度部材などから成るデリケートなワークを取り扱う工程を実現することが望まれている。
【0005】
上述のような柔軟物、軽量物、あるいは低強度部材といったワークを取り扱う場合、例えば、ワークの破損や変形を防ぐため、これらのワークには大きな力を作用させることができない。そこで、もしこの種のワークを多関節ロボットで操作する場合には、高精度に関節やリンクを介してワークに作用する力を制御する必要がある。
【0006】
例えば、従来から多関節ロボットの先端に搭載するハンドやグリッパのようなエンドエフェクタとともに力覚センサを配置する構成が知られている。この力覚センサの出力値をエンドエフェクタの駆動制御にフィードバックすることにより、ワークに作用する力を制御することができる。また、手先のエンドエフェクタのみならず、例えば、多関節ロボットのアームを構成する各リンクに作用する力を測定して、多関節ロボットの駆動制御にフィードバックすることが考えられる。特に、ロボットアームのリンクに作用する力のうち、多関節ロボットの高精度な駆動制御のために測定する必要がある力は、駆動軸周りに作用するトルクである。
【0007】
このようなアームのリンクに作用するトルクを検出する手段としては、ロボットアームの関節にトルクセンサを搭載する構成が提案されている(例えば下記の特許文献1)。
【先行技術文献】
【特許文献】
【0008】
特開2011-72186号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
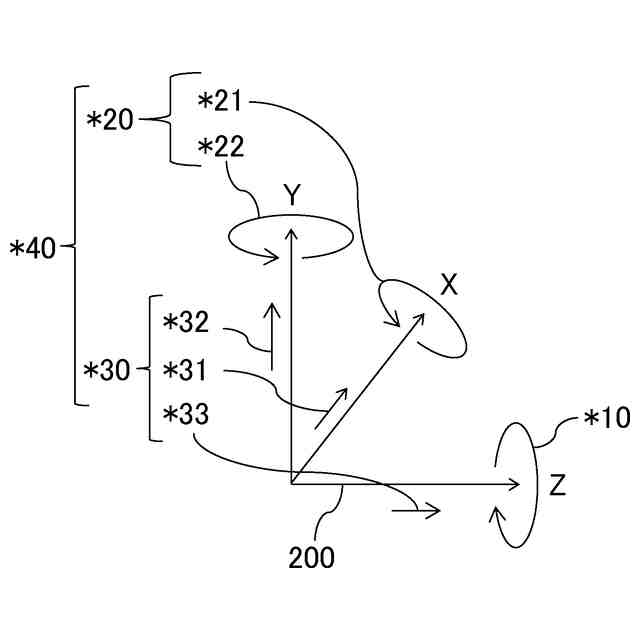
多関節ロボットアームの関節には、当該アームの動作に応じて、リンク自身に作用する重力、慣性力、コリオリ力や、隣接するリンクからの力が作用する。例えば、この関節に作用する力は、その関節の駆動軸をz軸としたときの直交座標系において、3方向の座標軸方向並進力、3方向の座標軸周りの回転力の合計で6方向の力、の各成分を含む。そして、この6方向の力のうち、関節の駆動軸周りを除く5方向に作用する力を、以下では他軸力という。
【0010】
一方、多関節ロボットアームの駆動制御では、例えばリンクに作用する関節の駆動軸周りの力を検出し、それを当該関節の駆動にフィードバックさせる。このため、関節に搭載された力センサは連結しているリンクに作用する関節の駆動軸周りに作用している力を正確に検出できるのが望ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
測距装置
12日前
キヤノン株式会社
撮像装置
12日前
キヤノン株式会社
撮像装置
11日前
キヤノン株式会社
撮像装置
11日前
キヤノン株式会社
撮像装置
5日前
キヤノン株式会社
画像形成装置
11日前
キヤノン株式会社
画像形成装置
11日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
情報処理装置
5日前
キヤノン株式会社
画像形成装置
11日前
キヤノン株式会社
画像形成装置
11日前
キヤノン株式会社
画像形成装置
11日前
キヤノン株式会社
画像形成装置
11日前
キヤノン株式会社
有機発光素子
11日前
キヤノン株式会社
画像表示装置
11日前
キヤノン株式会社
画像形成装置
15日前
キヤノン株式会社
画像形成装置
15日前
キヤノン株式会社
画像形成装置
15日前
キヤノン株式会社
液体収容ボトル
15日前
キヤノン株式会社
液体収容ボトル
15日前
キヤノン株式会社
情報処理装置の筐体
4日前
キヤノン株式会社
トナーカートリッジ
12日前
キヤノン株式会社
光学装置及び撮像装置
11日前
キヤノン株式会社
電源及び電源システム
5日前
キヤノン株式会社
管理システム及び方法
1日前
キヤノン株式会社
管理システム及び方法
4日前
キヤノン株式会社
定着装置及び画像形成装置
15日前
キヤノン株式会社
定着装置及び画像形成装置
11日前
キヤノン株式会社
露光装置及び画像形成装置
15日前
キヤノン株式会社
定着装置及び画像形成装置
11日前
キヤノン株式会社
インク収容容器及び記録装置
12日前
キヤノン株式会社
露光装置及び物品の製造方法
11日前
キヤノン株式会社
光学機器およびその制御方法
11日前
キヤノン株式会社
除電装置、及び画像形成装置
11日前
キヤノン株式会社
インク収容容器及び記録装置
12日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ