TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025025924
公報種別
公開特許公報(A)
公開日
2025-02-21
出願番号
2023131178
出願日
2023-08-10
発明の名称
測定装置
出願人
株式会社小糸製作所
代理人
弁理士法人アルファ国際特許事務所
主分類
G01S
17/894 20200101AFI20250214BHJP(測定;試験)
要約
【課題】受光面での反射光の入射光量が飽和状態になる場合でも、受光タイミングや反射光の入射光量を推定する。
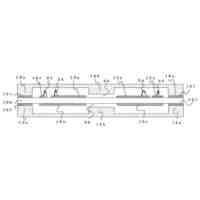
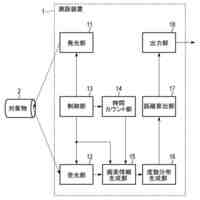
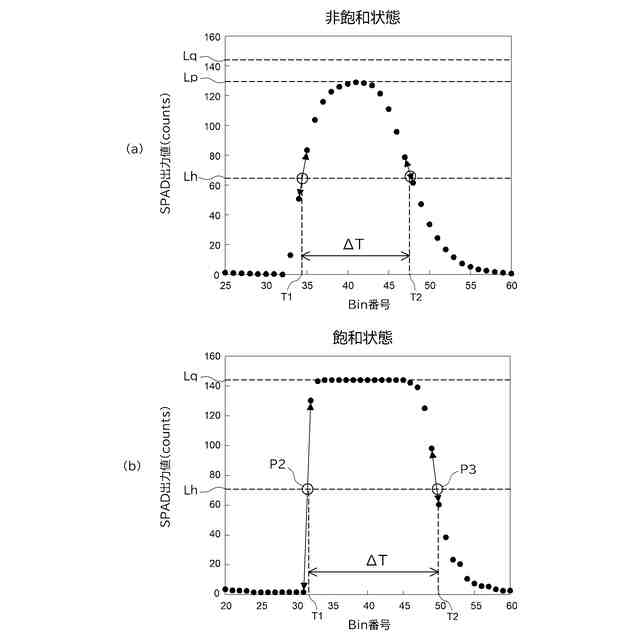
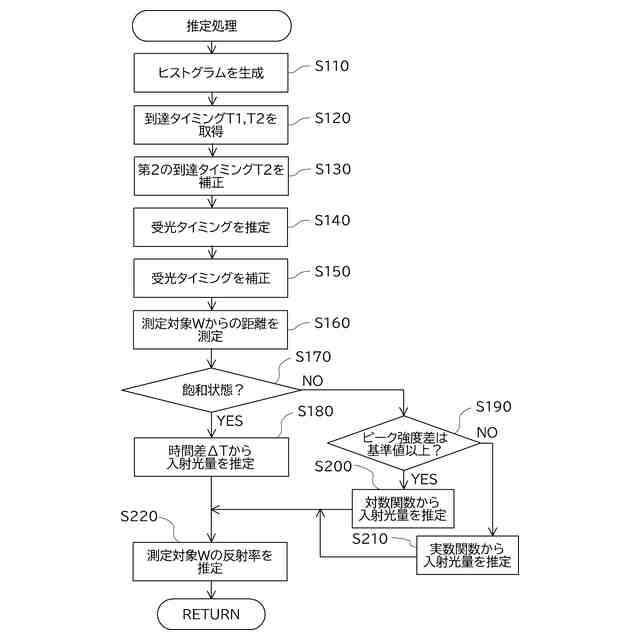
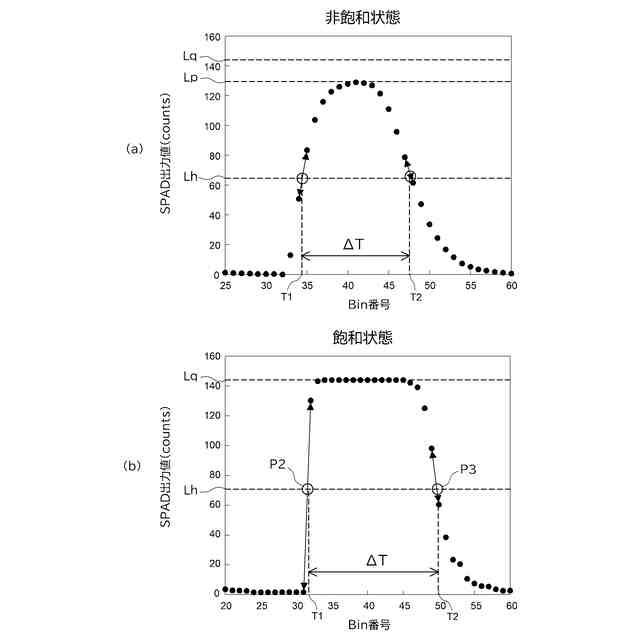
【解決手段】測定装置は、光を出射する投光器と、投光器から出射された光が測定対象に反射して戻っている反射光を受光する、複数のフォトンカウント型の受光素子がアレイ状に配置された受光面を有する受光器と、コントローラと、を備える。コントローラは、複数の受光素子からの出力値に基づきヒストグラムを生成するヒストグラム生成処理と、ヒストグラムが、ヒストグラムの波形の最高値と最低値との間の中間値に最初に達する第1の到達タイミングと、ヒストグラムが次に中間値に達する第2の到達タイミングとに基づき、反射光の受光タイミングを推定する受光タイミング推定処理と、投光器が光を出射する投光タイミングと、受光タイミングとに基づき、測定対象までの距離に応じた情報を出力する出力処理と、を実行する。
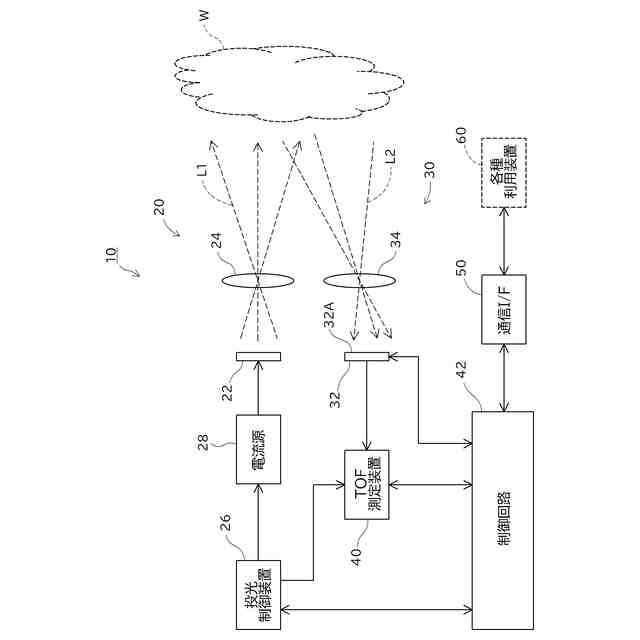
【選択図】図4
特許請求の範囲
【請求項1】
光を出射する投光器と、
前記投光器から出射された光が測定対象に反射して戻っている反射光を受光する、複数のフォトンカウント型の受光素子がアレイ状に配置された受光面を有する受光器と、
コントローラと、を備える測定装置であって、
前記コントローラは、
前記複数の受光素子からの出力値に基づきヒストグラムを生成するヒストグラム生成処理と、
前記ヒストグラムが、前記ヒストグラムの波形の最高値と最低値との間の中間値に最初に達する第1の到達タイミングと、前記ヒストグラムが次に前記中間値に達する第2の到達タイミングとに基づき、前記反射光の受光タイミングを推定する受光タイミング推定処理と、
前記投光器が光を出射する投光タイミングと、前記受光タイミングとに基づき、前記測定対象までの距離に応じた情報を出力する出力処理と、を実行する、測定装置。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の測定装置であって、
前記コントローラは、さらに、
前記ヒストグラムが飽和レベル未満である場合、前記ヒストグラムのピークが高さに応じて、前記受光タイミングを補正する受光タイミング補正処理を実行する、測定装置。
【請求項3】
請求項1または請求項2に記載の測定装置であって、
前記コントローラは、さらに、
前記ヒストグラムが飽和レベルを超える場合、前記第1の到達タイミングと前記第2の到達タイミングとの時間差が長さに応じて、前記受光タイミングを補正する受光タイミング補正処理を実行する、測定装置。
【請求項4】
請求項1または請求項2に記載の測定装置であって、
前記コントローラは、さらに、
前記反射光が前記受光面に照射されていないときに前記複数の受光素子からの出力値に基づき外乱光ヒストグラムを生成する外乱光ヒストグラム生成処理と、
前記外乱光ヒストグラムのピークが高さに応じて、前記第2の到達タイミングを補正する到達タイミング補正処理と、を実行する、測定装置。
【請求項5】
光を出射する投光器と、
前記投光器から出射された光が測定対象に反射して戻っている反射光を受光する、複数のフォトンカウント型の受光素子がアレイ状に配置された受光面を有する受光器と、
コントローラと、を備える測定装置であって、
前記コントローラは、
前記複数の受光素子からの出力値に基づきヒストグラムを生成するヒストグラム生成処理と、
前記ヒストグラムが、前記ヒストグラムの波形の最高値と最低値との間の中間値に最初に達する第1の到達タイミングと、前記ヒストグラムが次に前記中間値に達する第2の到達タイミングとの時間差に基づき、前記反射光の入射光量を推定する第1の入射光量推定処理と、を実行する、測定装置。
【請求項6】
請求項5に記載の測定装置であって、
前記コントローラは、さらに、
前記ヒストグラムのピークが飽和レベルよりも低く、かつ、前記ヒストグラムのピークと外乱光の入射光量との差が基準値以上である場合、前記複数の受光素子からの出力値と、
<式1>
反射光の入射光量=10
(a×受光素子からの出力値+b)
※a,bは係数
で示される対数関数と、に基づき、前記反射光の入射光量を推定する第2の入射光量推定処理と、を実行する、測定装置。
【請求項7】
請求項5または請求項6に記載の測定装置であって、
前記コントローラは、さらに、
前記ヒストグラムのピークが飽和レベルよりも低く、かつ、前記ヒストグラムのピークと外乱光の入射光量との差が基準値未満である場合、前記複数の受光素子からの出力値と、
<式2>
反射光の入射光量=c×受光素子からの出力値+d
※c,dは係数
で示される実数関数と、に基づき、前記反射光の入射光量を推定する第3の入射光量推定処理と、を実行する、測定装置。
【請求項8】
請求項6に記載の測定装置であって、
前記コントローラは、さらに、
前記外乱光の入射光量が高いほど、前記対数関数の係数aを小さい値に補正する第1の係数補正処理を実行する、測定装置。
【請求項9】
請求項7に記載の測定装置であって、
前記コントローラは、さらに、
前記外乱光の入射光量が高いほど、前記実数関数の係数cを小さい値に補正する第2の係数補正処理を実行する、測定装置。
発明の詳細な説明
【技術分野】
【0001】
本明細書に開示される技術は、測定装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
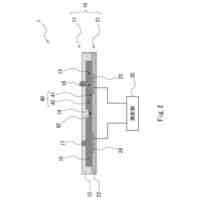
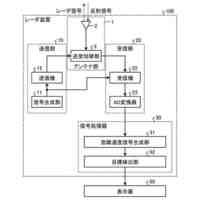
AD(Autonomous Driving:自動運転)やADAS(Advanced Driver-Assistance Systems:先進運転支援システム)の進展に伴い、車両の走行時における周囲環境の把握や自己位置推定に用いる測定装置の一つとして、LiDAR(Light Detection And Ranging)の開発研究が進められている。LiDARは、測定対象にレーザ光を投光(照射)する投光器と、レーザ光が測定対象に反射して戻ってくる反射光を受光する受光器とを備える。LiDARは、投光器がレーザ光を出射した投光タイミングと受光器が反射光を受光した受光タイミングとの差に基づき測定対象までの距離を測定することにより測定対象に関する情報を出力する。
【0003】
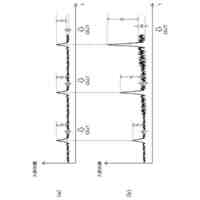
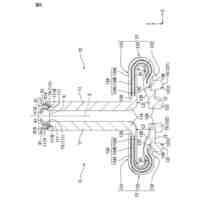
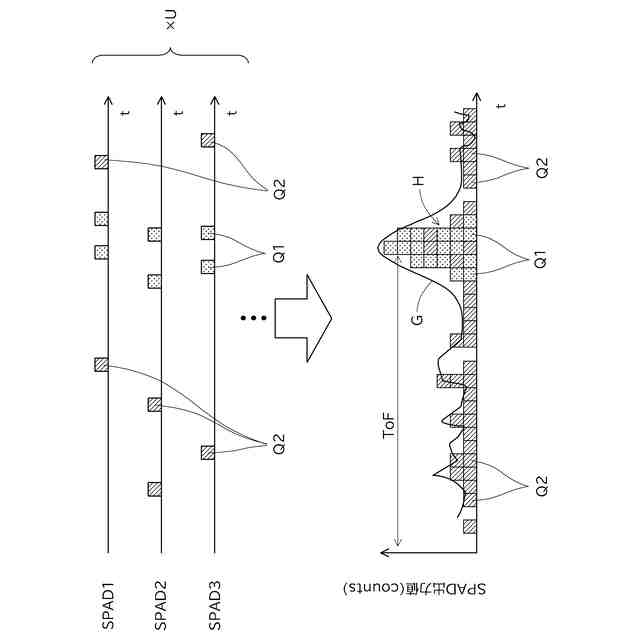
受光器は、フォトンカウント型の受光素子(SPAD:Single Photon Avalanche Diode)がアレイ状に複数配置された受光面を有している。測定装置では、所定個数ずつの受光素子からの出力値を、所定時間だけ積算した積算値が1画素として処理されてヒストグラムが生成される。生成されたヒストグラムのピークが検知されるタイミングが、反射光の受光タイミングとみなされて測定対象までの距離が測定される(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
特開2018-91760号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
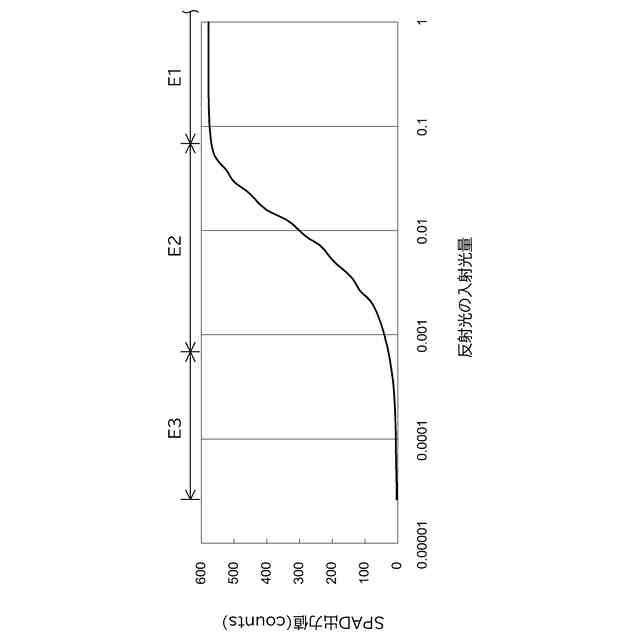
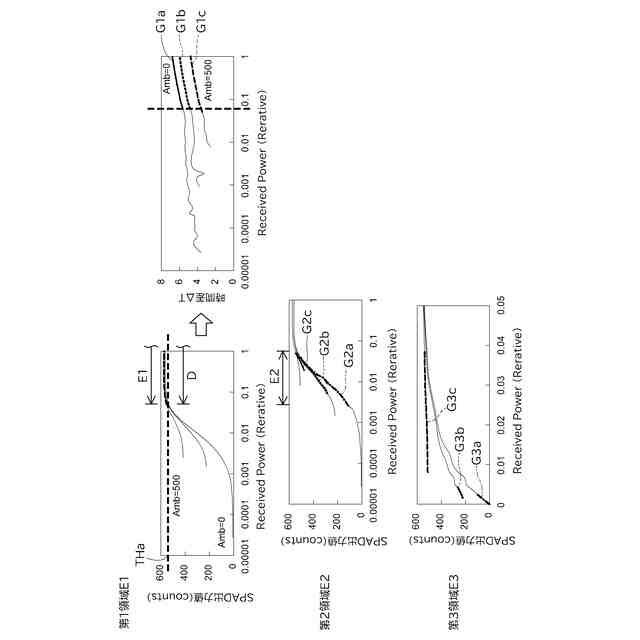
しかし、受光面での反射光の入射光量が所定の上限値を超える飽和状態になることがある。この飽和状態では、受光面での反射光の入射光量のピークタイミングが到来する前に、ヒストグラムの波形が上限値に達し、そのヒストグラムの波形が最初に上限値に達したタイミングが反射光の受光タイミングとみなされることになる。従って、飽和状態では、測定対象までの距離が実際の距離よりも短い距離に測定されることがある。また、飽和状態では、そもそも反射光の入射光量を推定することができない。
【0006】
本明細書では、上述した課題の少なくとも1つを解決することが可能な技術を開示する。
【課題を解決するための手段】
【0007】
本明細書に開示される技術は、例えば、以下の形態として実現することが可能である。
【0008】
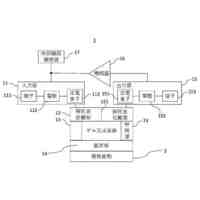
(1)本明細書に開示される測定装置は、光を出射する投光器と、前記投光器から出射された光が測定対象に反射して戻っている反射光を受光する、複数のフォトンカウント型の受光素子がアレイ状に配置された受光面を有する受光器と、コントローラと、を備える測定装置であって、前記コントローラは、前記複数の受光素子からの出力値に基づきヒストグラムを生成するヒストグラム生成処理と、前記ヒストグラムが、前記ヒストグラムの波形の最高値と最低値との間の中間値に最初に達する第1の到達タイミングと、前記ヒストグラムが次に前記中間値に達する第2の到達タイミングとに基づき、前記反射光の受光タイミングを推定する受光タイミング推定処理と、前記投光器が光を出射する投光タイミングと、前記受光タイミングとに基づき、前記測定対象までの距離に応じた情報を出力する出力処理と、を実行する。
【0009】
本発明者は、ヒストグラムが中間値に達する第1の到達タイミングと第2の到達タイミングとの相対関係は、受光面での反射光の入射光量のピークタイミングに相関することを新たに発見した。そこで、本測定装置によれば、受光面での反射光の入射光量が飽和状態になる場合でも、第1の到達タイミングと第2の到達タイミングとに基づき、受光タイミングを推定することができる。
【0010】
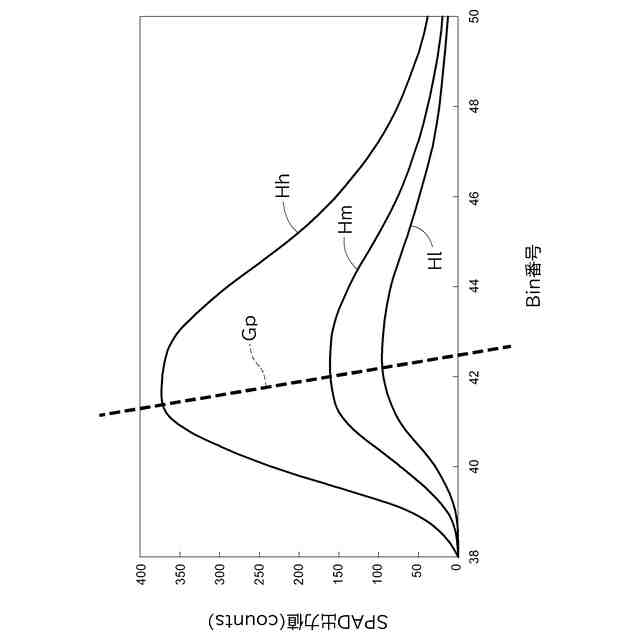
(2)上記測定装置において、前記コントローラは、さらに、前記ヒストグラムが飽和レベル未満である場合、前記ヒストグラムのピークの高さに応じて、前記受光タイミングを補正する受光タイミング補正処理を実行する構成としてもよい。本発明者は、受光面での反射光の入射光量のピークの高さに応じて、受光面での反射光の入射光量のピークタイミングが変動することを新たに発見した。そこで、本測定装置では、ヒストグラムのピークを検出可能な非飽和状態において、ヒストグラムのピークが高さに応じて、受光タイミングが補正される。このため、本測定装置によれば、ヒストグラムが飽和レベル未満である場合において、受光面での反射光の入射光量のピーク強度の高低に由来する受光タイミングの誤差を抑制することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社小糸製作所
測定装置
4日前
株式会社小糸製作所
測定装置
4日前
株式会社小糸製作所
測定装置の製造方法
4日前
株式会社小糸製作所
測定装置、および、測定装置の測定方法
4日前
株式会社小糸製作所
車両用灯具システム、電源回路
4日前
東レ株式会社
液体展開用シート
12日前
株式会社トプコン
植物センサ
8日前
アズビル株式会社
湿度センサ
5日前
株式会社クボタ
作業車両
11日前
キヤノン電子株式会社
サーボ加速度計
12日前
キヤノン電子株式会社
サーボ加速度計
12日前
株式会社東芝
センサ
4日前
キヤノン電子株式会社
サーボ加速度計
12日前
株式会社小野測器
回転計測装置
4日前
株式会社ミツトヨ
変位測定装置
4日前
トヨタ自動車株式会社
異音解析方法
4日前
トヨタ自動車株式会社
NVH解析装置
4日前
株式会社大真空
センサ及びその製造方法
19日前
キヤノン株式会社
撮像装置
4日前
三菱電機株式会社
振動センサ
8日前
矢崎総業株式会社
サーミスタ
12日前
株式会社トーキン
電流センサ
11日前
トヨタ自動車株式会社
レーダ取付構造
4日前
国立大学法人東京科学大学
サンプル測定装置
5日前
株式会社デンソー
電圧検出回路
11日前
株式会社デンソー
電圧検出回路
11日前
オムロン株式会社
プローブピン
8日前
株式会社ミツトヨ
画像測定機及びプログラム
11日前
三菱電機株式会社
信号処理器及びレーダ装置
11日前
トヨタ自動車株式会社
方法
4日前
富士電機機器制御株式会社
電流検出装置
4日前
キヤノン株式会社
測距装置
5日前
レーザーテック株式会社
検査方法及び検査装置
11日前
株式会社JVCケンウッド
ナビゲーション装置
18日前
富士電機機器制御株式会社
電流検出装置
4日前
TPR株式会社
スタイラス
8日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ