TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025018551
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2023122347
出願日
2023-07-27
発明の名称
遠隔医療支援システム、遠隔医療支援方法、及びプログラム
出願人
地方独立行政法人神奈川県立産業技術総合研究所
,
個人
,
モーションリブ株式会社
,
医療法人社団日米会
,
国立大学法人横浜国立大学
代理人
個人
,
個人
主分類
A61B
5/00 20060101AFI20250130BHJP(医学または獣医学;衛生学)
要約
【課題】遠隔から医療行為を伴う診断を行う場合に、より適切に診断を支援する。
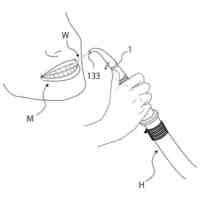
【解決手段】遠隔医療支援システム1は、作業機構25と、操作機構15と、動作制御部313と、提示部314と、を備える。作業機構25は、被検者への触診を含む医療行為を行うための機構である。操作機構15は、作業機構25に対する遠隔操作を操作者から受け付ける機構である。動作制御部313は、操作機構15が受け付けた遠隔操作に応じて、作業機構25の動作を制御すると共に、作業機構25が被検者へ接触したことに応じて作業機構25に与えられた反力を、操作機構15を介して操作者に力触覚として伝達する。提示部314は、作業機構側で取得された、医療行為に基づく診断を支援する支援情報を、操作者に提示する。
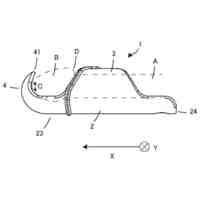
【選択図】図5
特許請求の範囲
【請求項1】
被検者への触診を含む医療行為を行うための作業機構と、
前記作業機構に対する遠隔操作を操作者から受け付ける操作機構と、
前記操作機構が受け付けた遠隔操作に応じて、前記作業機構の動作を制御すると共に、前記作業機構が前記被検者へ接触したことに応じて前記作業機構に与えられた反力を、前記操作機構を介して前記操作者に力触覚として伝達する動作制御手段と、
前記作業機構側で取得された、前記医療行為に基づく診断を支援する支援情報を、前記操作者に提示する支援情報提示手段と、
を備えることを特徴とする遠隔医療支援システム。
続きを表示(約 1,600 文字)
【請求項2】
前記動作制御手段及び前記支援情報提示手段がデータを送受信するために用いる通信経路の通信品質を監視する監視手段と、
前記監視手段が監視した通信品質に応じて、前記データを送受信する態様を異ならせる通信制御手段と、
をさらに備えることを特徴とする請求項1に記載の遠隔医療支援システム。
【請求項3】
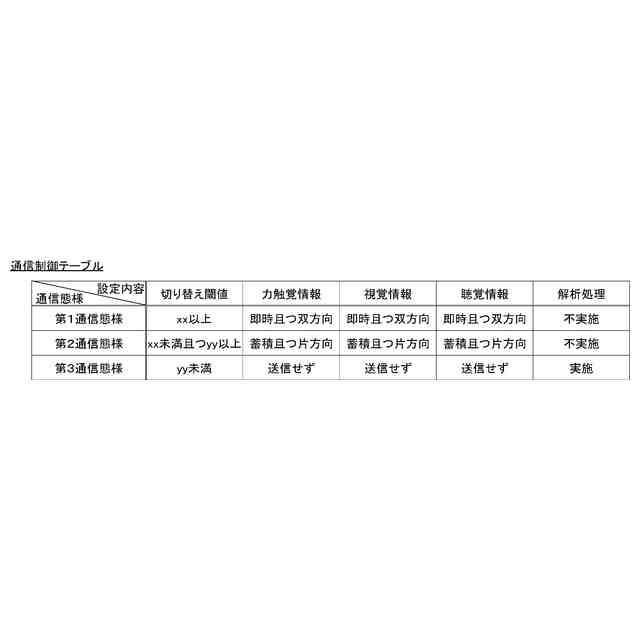
前記通信制御手段は、
前記監視手段が監視した通信品質が、予め定められた通信品質を満たしている場合には、前記データを時系列で即時に送受信する態様とし、
前記監視手段が監視した通信品質が、予め定められた通信品質を満たしていない場合には、前記データを時系列で蓄積してから、該蓄積したデータをまとめて送受信する態様とする、
ことを特徴とする請求項2に記載の遠隔医療支援システム。
【請求項4】
前記監視手段が監視した通信品質が、通信の実行が困難な通信品質の場合に、前記作業機構に与えられた反力及び前記支援情報の何れか又は双方に基づいて、前記医療行為に基づく診断に関する解析を行い、該解析結果を、前記作業機構側に提示する解析結果提示手段、
をさらに備えることを特徴とする請求項2又は3に記載の遠隔医療支援システム。
【請求項5】
前記動作制御手段は、
前記監視手段が監視した通信品質が、予め定められた通信品質を満たしていない場合には、前記操作機構が受け付けた遠隔操作に応じた前記作業機構の動作を抑制する、
ことを特徴とする請求項2又は3に記載の遠隔医療支援システム。
【請求項6】
前記作業機構には、前記被検者の状態を測定するための測定機器が装着され、
前記支援情報には、前記測定機器による測定結果を示す情報が少なくとも含まれる、
ことを特徴とする請求項1乃至3の何れか1項に記載の遠隔医療支援システム。
【請求項7】
前記動作制御手段は、
前記操作機構が前記操作者から受け付けた遠隔操作に代えて、前記作業機構が他の操作者から直接受け付けた操作に応じて、前記作業機構の動作を制御すると共に、前記作業機構が前記被検者へ接触したことに応じて前記作業機構に与えられた反力を、前記操作機構を介して前記操作者に力触覚として伝達する、
ことを特徴とする請求項1乃至3の何れか1項に記載の遠隔医療支援システム。
【請求項8】
被検者への触診を含む医療行為を行うための作業機構と、前記作業機構に対する遠隔操作を操作者から受け付ける操作機構と、を備えたシステムが行う遠隔医療支援方法であって、
前記操作機構が受け付けた遠隔操作に応じて、前記作業機構の動作を制御すると共に、前記作業機構が前記被検者へ接触したことに応じて前記作業機構に与えられた反力を、前記操作機構を介して前記操作者に力触覚として伝達する動作制御ステップと、
前記作業機構側で取得された、前記医療行為に基づく診断を支援する支援情報を、前記操作者に提示する支援情報提示ステップと、
を含むことを特徴とする遠隔医療支援方法。
【請求項9】
被検者への触診を含む医療行為を行うための作業機構と、前記作業機構に対する遠隔操作を操作者から受け付ける操作機構と、を備えたシステムを制御するコンピュータに、
前記操作機構が受け付けた遠隔操作に応じて、前記作業機構の動作を制御すると共に、前記作業機構が前記被検者へ接触したことに応じて前記作業機構に与えられた反力を、前記操作機構を介して前記操作者に力触覚として伝達する動作制御機能と、
前記作業機構側で取得された、前記医療行為に基づく診断を支援する支援情報を、前記操作者に提示する支援情報提示機能と、
を実現させることを特徴とするプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、遠隔医療支援システム、遠隔医療支援方法、及びプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
医療の現場において、罹患の疑いのある被検者は、自ら医療施設に赴いて、医師等の医療従事者の診断を受けることが通常である。この場合、医師等の医療従事者は、触診、打診、視診、及び聴診といった多様な観点から被検者を診断する。
しかしながら、医療施設の混雑状況等の事情によっては即時に診断を受けられない場合もある。また、緊急搬送中に診断を受ける場合や、在宅医療で診断を受ける場合、あるいは緊急時のトリアージを行う場合等において、経験を積んだ医療従事者の診断をその場で受けるのは、困難なことが実情である。
例えば、超音波(US:Ultrasonography)を用いた医療機器による診断を適切に行うには、医療従事者の経験等に依るところもあり、このような経験者が常時現場に配置され、いつでも診断できるということは医療従事者の人的リソース等を考慮すると現実的ではない。
【0003】
このような状況を考慮して、遠隔操作により医療行為を支援するという技術の一例が特許文献1に開示されている。特許文献1に開示の技術では、操作者によって過剰な速度での操作が行われた場合であっても、遠隔操作対象のロボットアームの挙動は過剰な速度にはならないよう制御することで、医療従事者の作業を支援するとされている。
【先行技術文献】
【特許文献】
【0004】
特開2023-034696号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、医療行為は、高い作業精度が要求される作業である。そのため、特許文献1に開示の技術のように、単にロボットアームの挙動が過剰な速度とならないように制御するのみでは、要求される作業精度を満たすことは困難と考えられる。
すなわち、医療従事者が、遠隔から、例えば、触診、打診、視診、及び聴診といった様々な観点での診断を行うためには、未だ改善の余地があると言える。
【0006】
本発明は、このような状況に鑑みてなされたものである。そして、本発明の課題は、遠隔から医療行為を伴う診断を行う場合に、より適切に診断を支援することである。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明の一実施形態に係る遠隔医療支援システムは、
被検者への触診を含む医療行為を行うための作業機構と、
前記作業機構に対する遠隔操作を操作者から受け付ける操作機構と、
前記操作機構が受け付けた遠隔操作に応じて、前記作業機構の動作を制御すると共に、前記作業機構が前記被検者へ接触したことに応じて前記作業機構に与えられた反力を、前記操作機構を介して前記操作者に力触覚として伝達する動作制御手段と、
前記作業機構側で取得された、前記医療行為に基づく診断を支援する支援情報を、前記操作者に提示する支援情報提示手段と、
を備えることを特徴とする。
【発明の効果】
【0008】
本発明によれば、遠隔から医療行為を伴う診断を行う場合に、より適切に診断を支援することができる。
【図面の簡単な説明】
【0009】
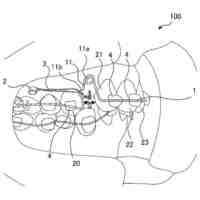
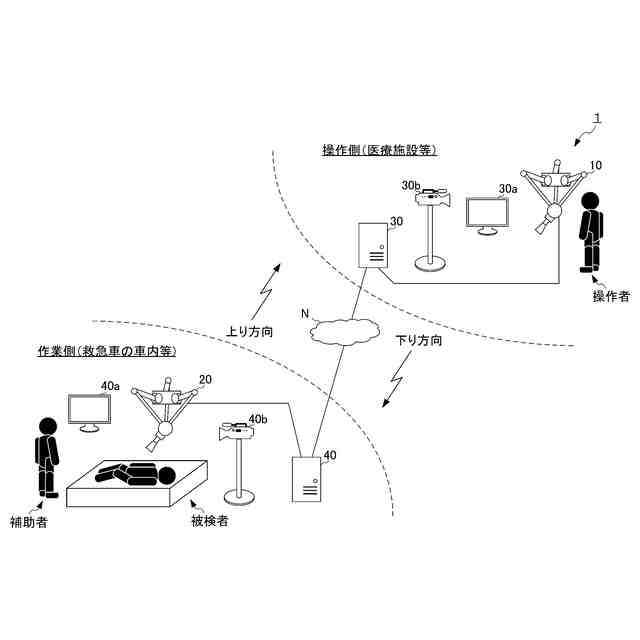
本実施形態に係る遠隔医療支援システム1の全体構成を示す模式図である。
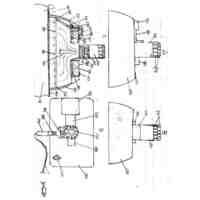
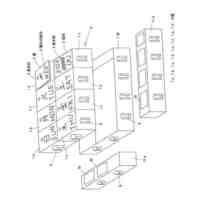
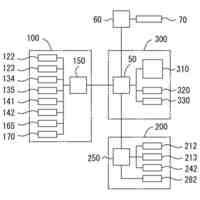
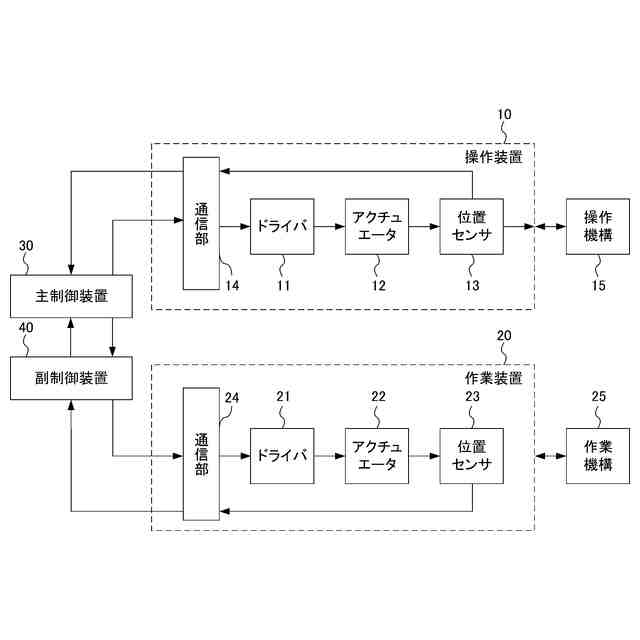
操作装置10と、作業装置20のハードウェア構成を示すブロック図である。
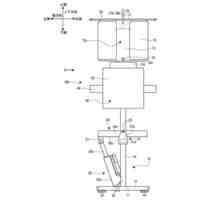
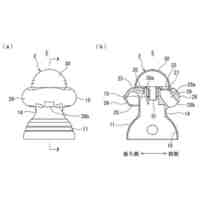
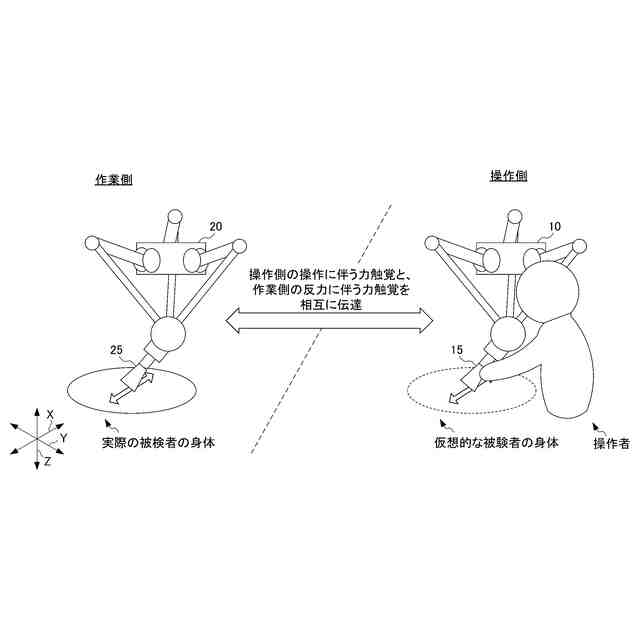
操作装置10と、作業装置20の構成例について示す斜視図である。
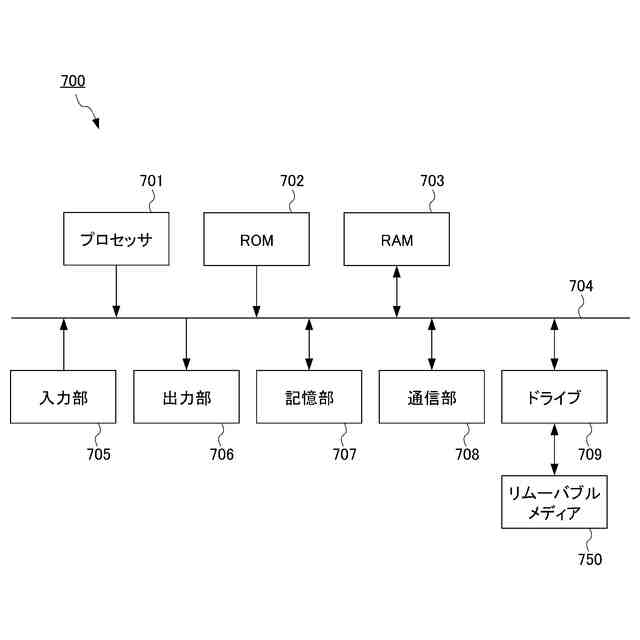
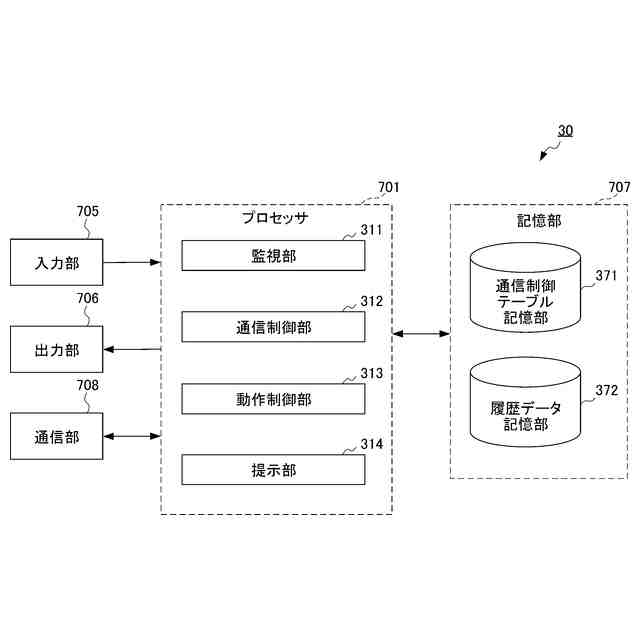
主制御装置30や副制御装置40のハードウェア構成の一例である、ハードウェア構成700を示すブロック図である。
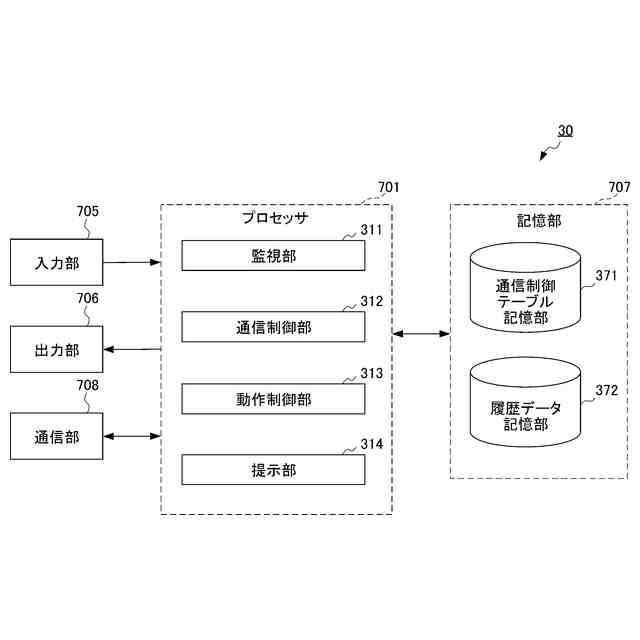
主制御装置30の機能的構成を示すブロック図である。
通信制御テーブルのデータ構造の一例を示すテーブルである。
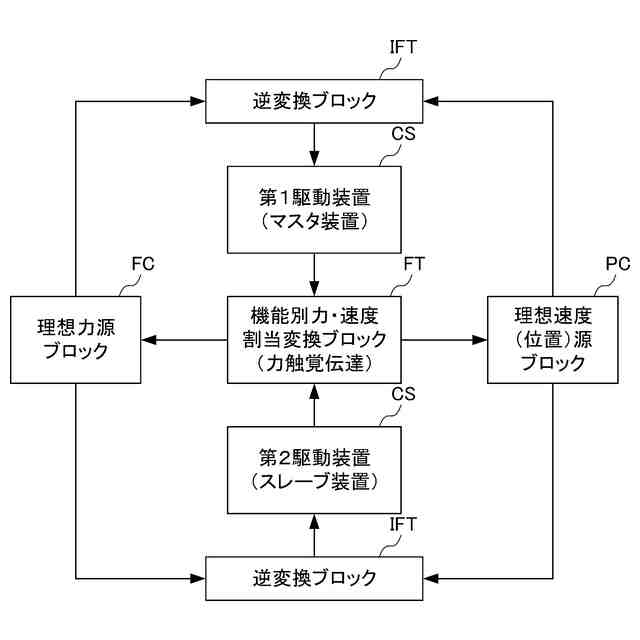
動作制御部313の制御アルゴリズムを示すブロック図である。
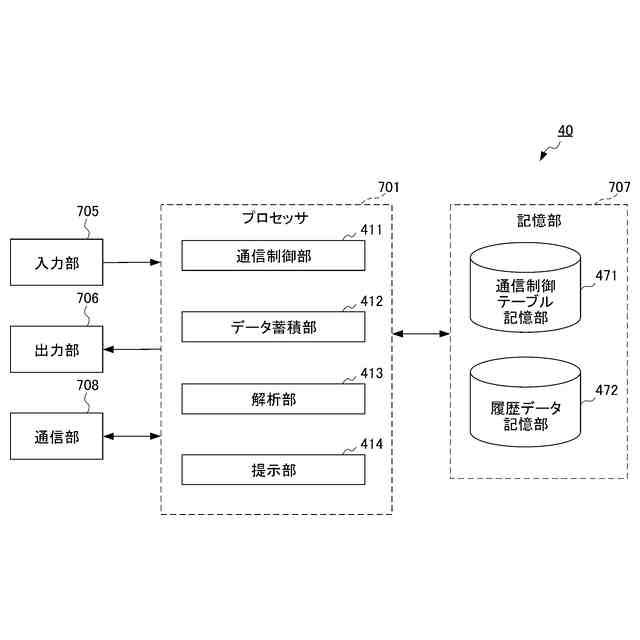
副制御装置40の機能的構成を示すブロック図である。
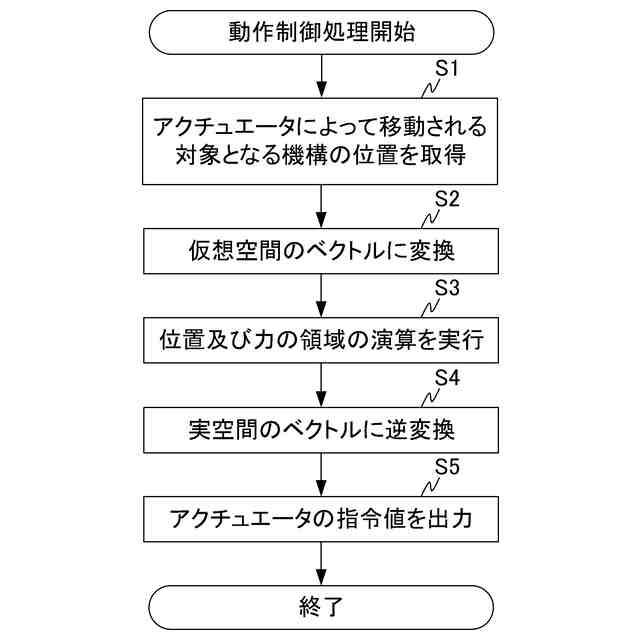
遠隔医療支援システム1が実行する動作制御処理の流れを説明するフローチャートである。
遠隔医療支援システム1が実行する遠隔医療支援処理の流れを説明するフローチャートである。
【発明を実施するための形態】
【0010】
以下、添付の図面を参照して本発明の実施形態の一例について説明する。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
健康器具
5か月前
個人
短下肢装具
10日前
個人
歯茎みが品
6か月前
個人
鼾防止用具
5か月前
個人
洗井間専家。
4か月前
個人
脈波測定方法
5か月前
個人
導電香
6か月前
個人
嚥下鍛錬装置
25日前
個人
白内障治療法
4か月前
個人
前腕誘導装置
14日前
個人
脈波測定方法
5か月前
個人
マッサージ機
5か月前
個人
矯正椅子
2か月前
個人
片足歩行支援具
6か月前
個人
歯の修復用材料
1か月前
個人
クリップ
6か月前
個人
ホバーアイロン
3か月前
個人
バッグ式オムツ
1か月前
個人
口内洗浄具
5か月前
個人
陣痛緩和具
25日前
個人
シャンプー
3か月前
三生医薬株式会社
錠剤
4か月前
個人
歯の保護用シール
2か月前
個人
車椅子持ち上げ器
4か月前
個人
哺乳瓶冷まし容器
8日前
株式会社コーセー
化粧料
6か月前
株式会社コーセー
美爪料
6か月前
株式会社大野
骨壷
29日前
株式会社結心
手袋
4か月前
株式会社八光
剥離吸引管
1か月前
個人
除菌システム
6か月前
株式会社 MTG
浴用剤
6か月前
個人
性行為補助具
今日
個人
服薬支援装置
4か月前
株式会社ニデック
検眼装置
22日前
個人
歯列矯正用器具
5か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ