TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025016008
公報種別
公開特許公報(A)
公開日
2025-01-31
出願番号
2023118988
出願日
2023-07-21
発明の名称
作業車両、作業車両のコントローラ、及び、作業車両の速度制御方法
出願人
株式会社クボタ
代理人
個人
,
個人
,
個人
主分類
E02F
9/22 20060101AFI20250124BHJP(水工;基礎;土砂の移送)
要約
【課題】作業車両の走り出しにおいて、走行抵抗が大きい場合であっても、速やかに走行を開始することができる。
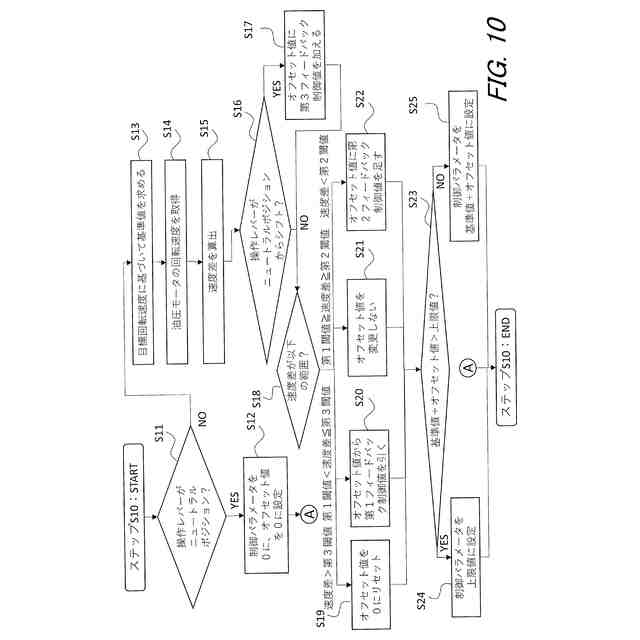
【解決手段】作業車両の速度制御方法は、走行装置を駆動するように構成される油圧モータの目標回転速度を、操作部材を介して入力し、操作部材の操作に応じて油圧モータに作動油を供給するように構成される油圧ポンプの押しのけ容積を決定するための制御パラメータを決定し、制御パラメータに応じて油圧ポンプを回転させることによって、油圧モータを回転させ、油圧モータの回転速度をサンプリング周期で検出し、目標回転速度から回転速度を引いた速度差をサンプリング周期で算出し、目標回転速度に基づいて制御パラメータの基準値を求め、サンプリング周期で速度差に応じたオフセット値を算出し、制御パラメータを基準値にオフセット値を加えた値とすることにより、サンプリング周期で制御パラメータを更新することを含む。
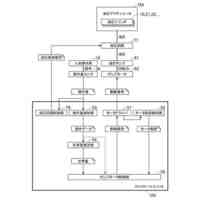
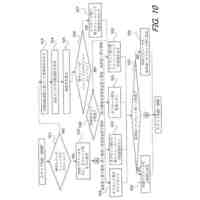
【選択図】図10
特許請求の範囲
【請求項1】
走行装置を駆動するように構成される油圧モータの目標回転速度を、操作部材を介して取得し、
前記操作部材の操作に応じて前記油圧モータに作動油を供給するように構成される油圧ポンプの押しのけ容積を設定するための制御パラメータを決定し、
前記制御パラメータに応じて前記油圧ポンプの前記押しのけ容積を制御し、前記油圧ポンプを回転させることによって、前記油圧モータを回転させ、
前記油圧モータの回転速度をサンプリング周期で検出し、
前記回転速度から前記目標回転速度を引いた速度差を前記サンプリング周期で算出し、
前記目標回転速度に基づいて前記制御パラメータの基準値を求め、
前記サンプリング周期で前記速度差に応じたオフセット値を算出し、
前記制御パラメータを前記基準値に前記オフセット値を加えた値とすることにより、前記サンプリング周期で前記制御パラメータを更新する、
ことを含む、
作業車両の速度制御方法。
続きを表示(約 1,600 文字)
【請求項2】
前記サンプリング周期で前記オフセット値を算出することは、
前記速度差が所定の正の第1閾値よりも大きいときに、前記押しのけ容積を減らすために前記オフセット値から第1フィードバック制御値を引き、
前記速度差が所定の負の第2閾値よりも小さいときに、前記押しのけ容積を減らすために前記オフセット値に第2フィードバック制御値を足し、
前記速度差が前記第2閾値と前記第1閾値との間にあるとき、前記オフセット値を変更しない、
ことを含む、請求項1に記載の速度制御方法。
【請求項3】
追加操作部材が操作されていないときに位置する戻り位置から前記追加操作部材がシフトされると、前記オフセット値に前記第2フィードバック制御値よりも大きい第3フィードバック制御値を加える、
請求項2に記載の速度制御方法。
【請求項4】
前記追加操作部材は、操作レバーを含み、
前記戻り位置は、ニュートラルポジションである、
請求項3に記載の速度制御方法。
【請求項5】
前記速度差が前記第1閾値よりも大きい第3閾値よりも大きいときに、前記オフセット値を0とする、
請求項1に記載の速度制御方法。
【請求項6】
前記基準値に前記オフセット値を加えた値が予め定めた上限値を超えたときは、前記制御パラメータを前記上限値とする、請求項1に記載の速度制御方法。
【請求項7】
前記第1フィードバック制御値の絶対値は、前記第2フィードバック制御値の絶対値よりも大きい、請求項2に記載の速度制御方法。
【請求項8】
前記制御パラメータは、前記第1油圧ポンプの押しのけ容積を変化させるパイロット油の油圧を制御するように構成される制御機構を制御する電流値である、
請求項1から6のいずれか1項に記載の速度制御方法。
【請求項9】
走行装置と、
前記走行装置を駆動するように構成される油圧モータと、
前記油圧モータに作動油を供給するように構成される油圧ポンプと、
前記油圧ポンプを回転させるように構成される原動機と、
前記油圧モータの目標回転速度に対応する入力を受け取る操作部材と、
前記油圧モータの回転速度をサンプリング周期で検出するように構成される回転速度センサと、
前記油圧ポンプの押しのけ容積を変化させるパイロット油の油圧を制御するように構成される制御機構と、
前記原動機と前記制御機構とを制御するように構成されるハードウェアプロセッサと、
を備え、
前記ハードウェアプロセッサは、
前記制御機構を制御するための制御パラメータの基準値を前記目標回転速度に基づいて求め、
前記回転速度から前記目標回転速度を引いた速度差を前記サンプリング周期で算出し、
前記サンプリング周期で前記速度差に応じたオフセット値を算出し、
前記制御パラメータを前記基準値に前記オフセット値を加えた値とすることにより、前記サンプリング周期で前記制御パラメータを更新する
ように構成される、
作業車両。
【請求項10】
前記ハードウェアプロセッサは、
前記速度差が所定の正の第1閾値よりも大きいときに、前記押しのけ容積を減らすために前記オフセット値から第1フィードバック制御値を引き、
前記速度差が所定の負の第2閾値よりも小さいときに、前記押しのけ容積を増やすために前記オフセット値に第2フィードバック制御値を足し、
前記速度差が前記第2閾値と前記第1閾値との間にあるとき、前記オフセット値を変更しないようにすることによって、
前記サンプリング周期で前記オフセット値を更新するように構成される、
請求項9に記載の作業車両。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
参照による引用
本出願は、2022年8月22日に出願された、日本国特許出願2022-131895号の利益を主張し、それぞれ、その全体を参照により本明細書に組み込む。
続きを表示(約 2,900 文字)
【0002】
本発明は、作業車両、作業車両のコントローラ、及び、作業車両の速度制御方法に関する。
【背景技術】
【0003】
特許文献1は、走行レバーの入力と走行モータの回転速度とを計測し、走行モータの回転速度が走行レバーの入力に基づく指令に合うように走行ポンプのパイロット圧を調整する技術を開示している。特許文献2は、リモコンバルブに供給されるパイロット油の一次圧と、走行モータの回転速度を検出し、検出された一次圧と回転速度に基づいて、目標となる車速となるように一次圧を制御する方法を開示している。
【先行技術文献】
【特許文献】
【0004】
特開2017-053413号公報
特開2020-038002号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1及び特許文献2のいずれの方法でも、走行モータの回転速度を利用したフィードバックしている。特許文献2のように一次圧を下げている場合、一般的なフィードバック手法では、作業車両の走り出しにおいて、走行抵抗が大きい場合、走行可能な一次圧とするために時間を要する場合がある。
【課題を解決するための手段】
【0006】
本開示の第1態様に係る作業車両の速度制御方法は、走行装置を駆動するように構成される油圧モータの目標回転速度を、操作部材を介して取得することを含む。当該方法は、操作部材の操作に応じて油圧モータに作動油を供給するように構成される油圧ポンプの押しのけ容積を設定するための制御パラメータを決定することを含む。当該方法は、制御パラメータに応じて油圧ポンプの押しのけ容積を制御し、油圧ポンプを回転させることによって、油圧モータを回転させることを含む。当該方法は、油圧モータの回転速度をサンプリング周期で検出することを含む。当該方法は、回転速度から目標回転速度を引いた速度差をサンプリング周期で算出することを含む。当該方法は、目標回転速度に基づいて制御パラメータの基準値を求めることを含む。当該方法は、サンプリング周期で速度差に応じたオフセット値を算出することを含む。当該方法は、制御パラメータを基準値にオフセット値を加えた値とすることにより、サンプリング周期で制御パラメータを更新することを含む。
【0007】
本開示の第2態様に係る作業車両は、走行装置と、油圧モータと、油圧ポンプと、原動機と、操作部材と、回転速度センサと、制御機構と、ハードウェアプロセッサとを備える。油圧モータは、走行装置を駆動するように構成される。油圧ポンプは、油圧モータに作動油を供給するように構成される。原動機は、油圧ポンプを回転させるように構成される。操作部材は、油圧モータの目標回転速度に対応する入力を受け取るように構成される。回転速度センサは、油圧モータの回転速度をサンプリング周期で検出するように構成される。制御機構は、油圧ポンプの押しのけ容積を変化させるパイロット油の油圧を制御するように構成される。ハードウェアプロセッサは、原動機と制御機構とを制御するように構成される。ハードウェアプロセッサは、制御機構を制御するための制御パラメータの基準値を目標回転速度に基づいて求め、回転速度から目標回転速度を引いた速度差をサンプリング周期で算出し、サンプリング周期で速度差に応じたオフセット値を算出し、制御パラメータを基準値にオフセット値を加えた値とすることにより、サンプリング周期で制御パラメータを更新するように構成される。
【0008】
本開示の第3態様に係る作業車両のコントローラは、ハードウェアプロセッサを含む。当該ハードウェアプロセッサは、走行装置を駆動するように構成される油圧モータの目標回転速度に対応する入力を、操作部材から受け取るように構成される。当該ハードウェアプロセッサは、操作部材の操作に応じて油圧モータに作動油を供給するように構成される油圧ポンプの押しのけ容積を決定するための制御パラメータを決定するように構成される。当該ハードウェアプロセッサは、油圧ポンプを回転させるように構成された原動機を制御パラメータに応じて駆動する指令を原動機に送ることによって、油圧ポンプを介して油圧モータを回転させるように構成される。当該ハードウェアプロセッサは、サンプリング周期で検出された油圧モータの回転速度を、回転速度センサから受け取るように構成される。当該ハードウェアプロセッサは、目標回転速度から回転速度を引いた速度差をサンプリング周期で算出するように構成される。当該ハードウェアプロセッサは、目標回転速度に基づいて制御パラメータの基準値を求めるように構成される。当該ハードウェアプロセッサは、サンプリング周期で速度差に応じたオフセット値を算出し、制御パラメータを基準値にオフセット値を加えた値とすることにより、サンプリング周期で制御パラメータを更新するように構成される。
【発明の効果】
【0009】
本願の第1態様から第3態様に開示される技術によれば、例えば作業車両の走り出しにおいて、走行抵抗が大きい場合であっても、速やかに走行を開始することができる。
【図面の簡単な説明】
【0010】
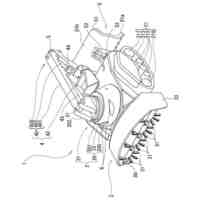
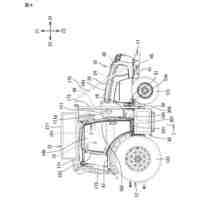
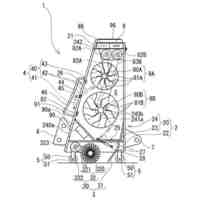
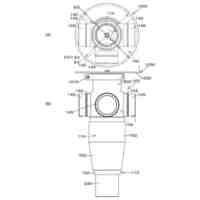
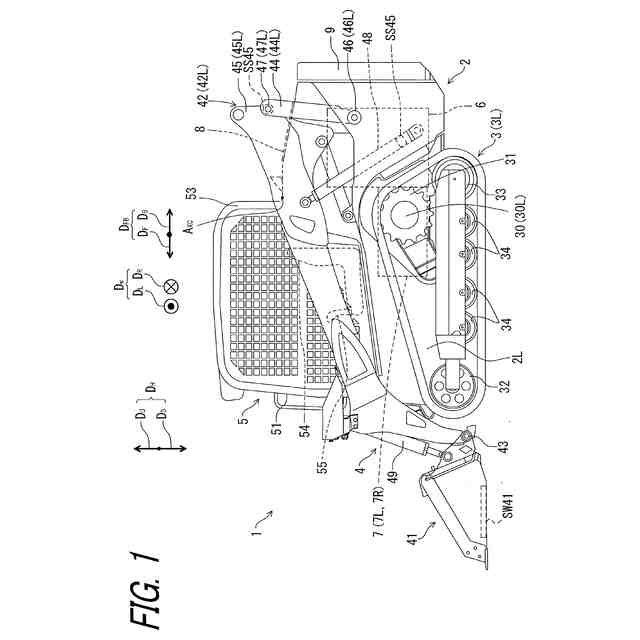
図1は、作業車両の側面図である。
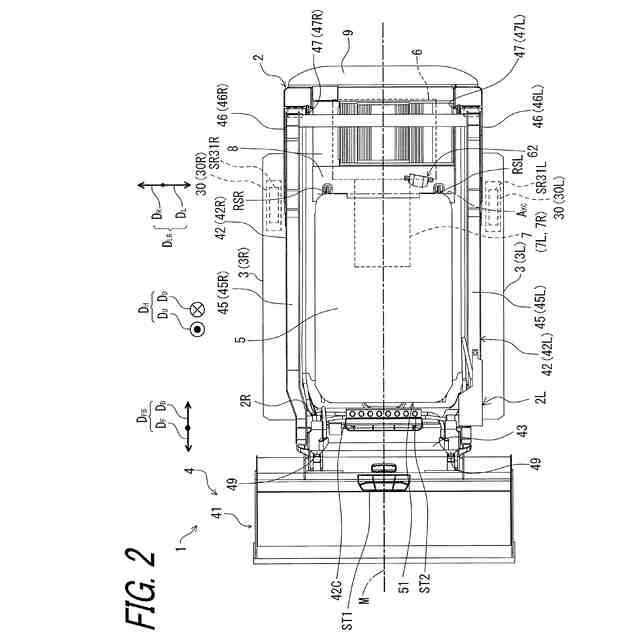
図2は、作業車両の上面図である。
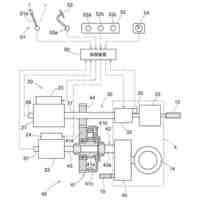
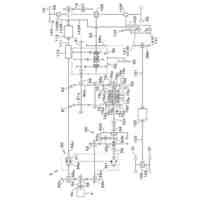
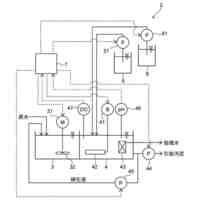
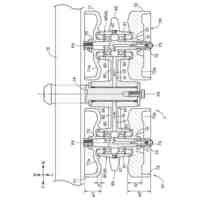
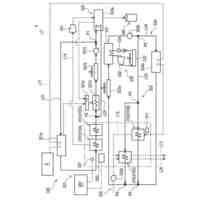
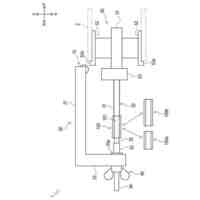
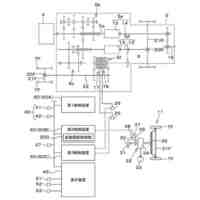
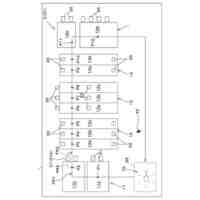
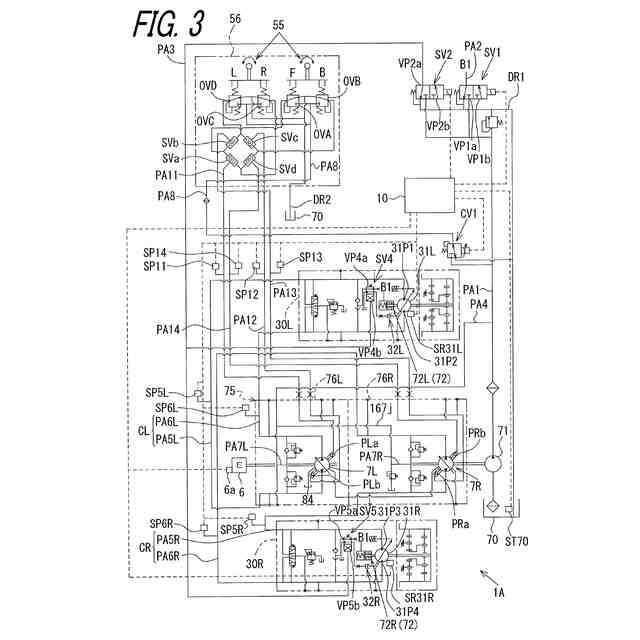
図3は、第1実施形態における作業車両の走行系の油圧回路図である。
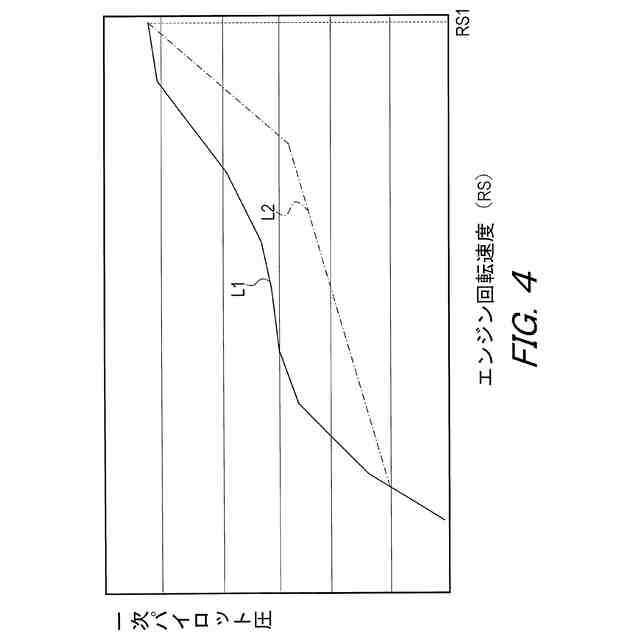
図4は、エンジン回転速度と一次パイロット圧と、設定線との関係を示す図である。
図5は、操作レバーの操作位置と、二次パイロット圧との関係を示す図である。
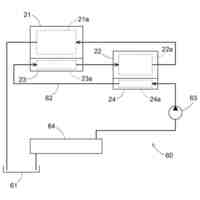
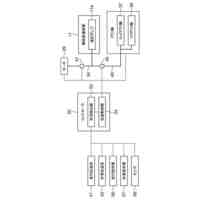
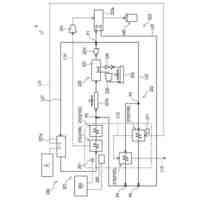
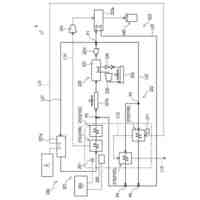
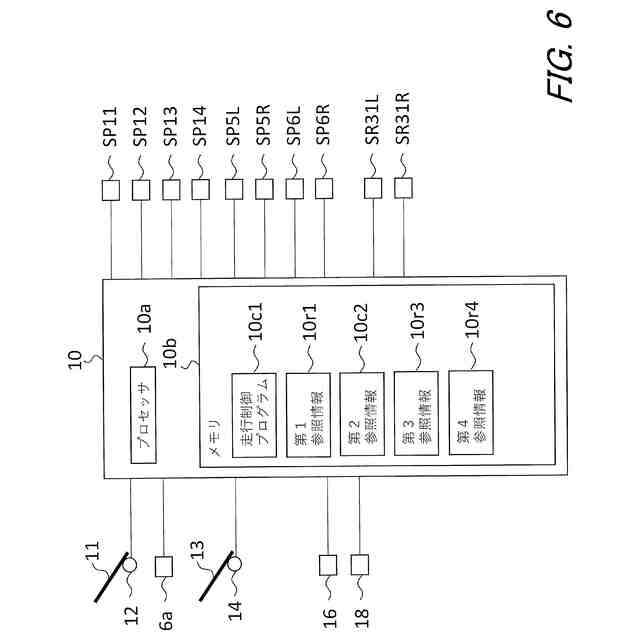
図6は、作業車両のブロック図である。
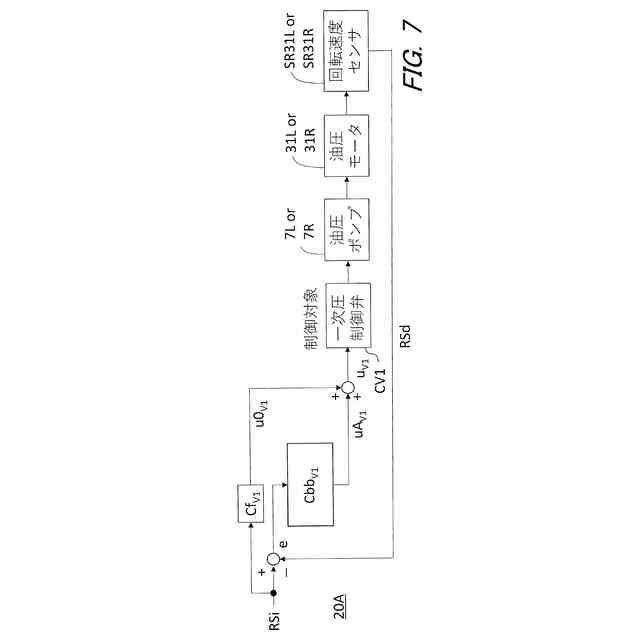
図7は、第1実施形態における制御ブロック図を示す。
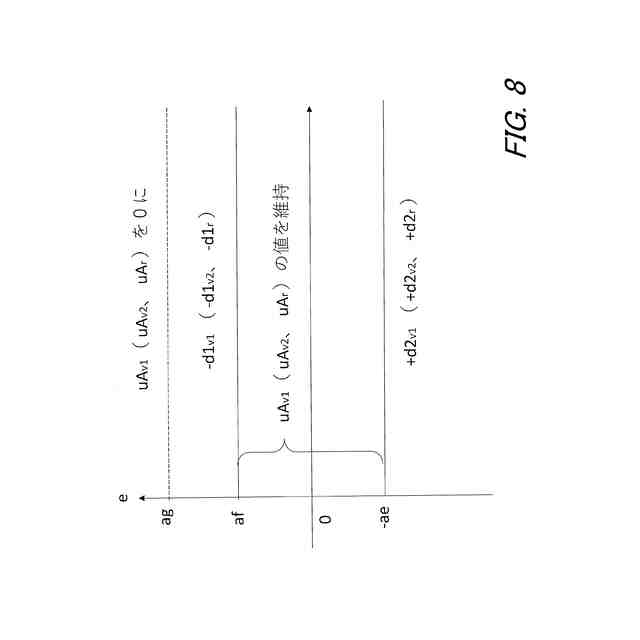
図8は、実施形態における速度差と、オフセット値の更新方法との関係を示す図である。
図9は、第1実施形態に係る作業車両の動作を示すフローチャートである。
図10は、制御パラメータの決定方法を示すフローチャートである。
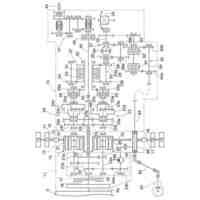
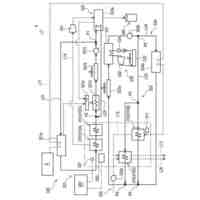
図11は、第2実施形態における作業車両の走行系の油圧回路図である。
図12は、第2実施形態における制御ブロック図を示す。
図13は、第2実施形態に係る作業車両の動作を示すフローチャートである。
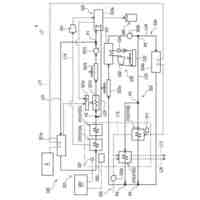
図14は、第2実施形態の変形例における作業車両の走行系の油圧回路図である。
図15は、第2実施形態の変形例における制御ブロック図を示す。
図16は、第3実施形態における作業車両の走行系の油圧回路図である。
図17は、第3実施形態における制御ブロック図を示す。
図18は、第3実施形態に係る作業車両の動作を示すフローチャートである。<参照による引用>
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
15日前
株式会社クボタ
作業車
15日前
株式会社クボタ
作業車
16日前
株式会社クボタ
作業機
2日前
株式会社クボタケミックス
弁装置
16日前
株式会社クボタ
作業車
15日前
株式会社クボタ
作業機
15日前
株式会社クボタケミックス
管継手
8日前
株式会社クボタ
作業車両
19日前
株式会社クボタ
作業車両
8日前
株式会社クボタ
電動作業車
16日前
株式会社クボタ
水処理設備
3日前
株式会社クボタ
電動作業車
22日前
株式会社クボタ
竪型の反応炉
9日前
株式会社クボタケミックス
電気融着継手
3日前
株式会社クボタ
竪型の反応炉
9日前
株式会社クボタ
クローラ走行装置
19日前
株式会社クボタ
有機物堆肥化装置
2日前
株式会社クボタ
排気ガス浄化システム
15日前
株式会社クボタ
排気ガス浄化システム
15日前
株式会社クボタ
排気ガス浄化システム
15日前
株式会社クボタ
排気ガス浄化システム
15日前
株式会社クボタ
排気ガス浄化システム
15日前
株式会社クボタケミックス
多層管及びその製造方法
19日前
株式会社クボタ
水処理設備および水処理方法
15日前
株式会社クボタケミックス
切削工具、切削方法及び施工方法
15日前
丸栄工業株式会社
排水集合管の保護カバー
19日前
株式会社クボタ
情報処理方法、プログラム、及び情報処理装置
22日前
株式会社クボタ
インジェクタクリップおよびインジェクタ取付構造
1日前
株式会社クボタ
作業車
2日前
株式会社クボタ
作業車両
9日前
株式会社クボタ
制御システム、作業車両、制御方法およびコンピュータプログラム
22日前
株式会社クボタ
作業車両、作業車両のコントローラ、及び、作業車両の速度制御方法
8日前
株式会社クボタ
作業車両、作業車両のコントローラ、及び、作業車両の速度制御方法
8日前
株式会社クボタ
処理設備の監視システム
17日前
株式会社クボタケミックス
排水配管継手の更新方法および排水配管構造
9日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ