TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025011510
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023113675
出願日
2023-07-11
発明の名称
測位装置、移動体、及び測位方法
出願人
パナソニックIPマネジメント株式会社
代理人
弁理士法人鷲田国際特許事務所
主分類
G01C
21/28 20060101AFI20250117BHJP(測定;試験)
要約
【課題】マーカの設置が適切であるか否かを判定できる測位装置を提供すること。
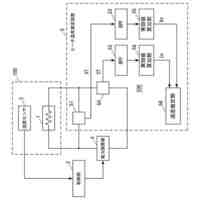
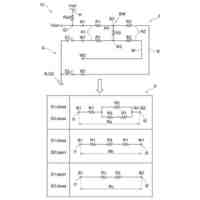
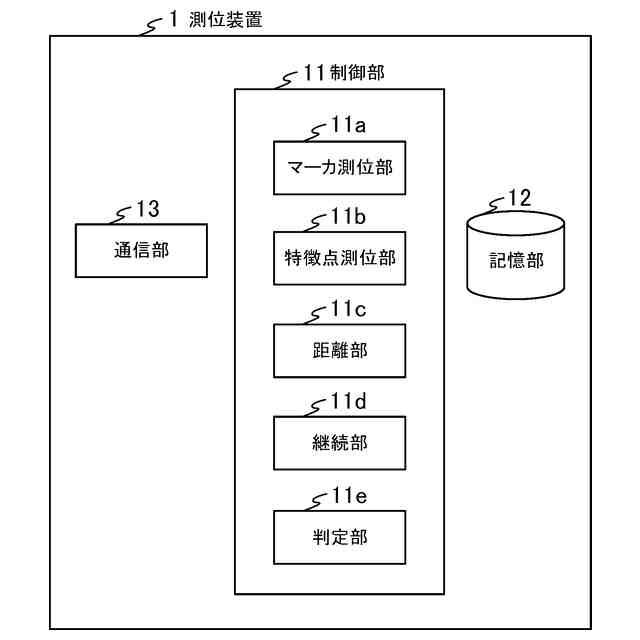
【解決手段】測定装置は、移動体に搭載されたカメラから画像データを受信する受信部と、前記画像データに含まれるマーカ画像に基づいて前記移動体の位置を計算するマーカ測位部と、前記移動体の過去の位置と前記画像データの特徴点とを用いて前記移動体の位置を計算する特徴点測位部と、前記マーカ測位部が第3マーカのマーカ測位によって前記移動体の位置を計算した場合に、前記特徴点測位部が第1マーカのマーカ測位の結果を前記移動体の前記過去の位置として用いて計算した前記移動体の位置と、前記特徴点測位部が第2マーカのマーカ測位の結果を前記移動体の前記過去の位置として用いて計算した前記移動体の位置との夫々と、前記第3マーカのマーカ測位によって計算された前記移動体の位置との差に応じて、前記第1マーカ及び前記第2マーカの設置状態を判定する判定部と、を有する。
【選択図】図6
特許請求の範囲
【請求項1】
移動体に搭載されたカメラから画像データを受信する受信部と、
前記画像データに含まれるマーカ画像に基づいて、前記移動体の位置を計算するマーカ測位部と、
前記移動体の過去の位置と前記画像データの特徴点とを用いて前記移動体の位置を計算する特徴点測位部と、
前記マーカ測位部が第3マーカのマーカ測位によって前記移動体の位置を計算した場合に、前記特徴点測位部が第1マーカのマーカ測位の結果を前記移動体の前記過去の位置として用いて計算した前記移動体の位置と、前記特徴点測位部が第2マーカのマーカ測位の結果を前記移動体の前記過去の位置として用いて計算した前記移動体の位置とのそれぞれと、前記第3マーカのマーカ測位によって計算された前記移動体の位置との差に応じて、前記第1マーカおよび前記第2マーカの設置状態を判定する判定部と、
を有する測位装置。
続きを表示(約 1,500 文字)
【請求項2】
前記判定部は、更に、
前記第3マーカのマーカ測位によって計算された前記移動体の位置と前記第1マーカのマーカ測位の結果を前記移動体の前記過去の位置として用いて計算した移動体の位置との間の距離である第1距離と、前記第3マーカのマーカ測位によって計算された前記移動体の位置と前記第1マーカのマーカ測位の結果を前記移動体の前記過去の位置として用いて計算した移動体の位置との間の距離である第2距離とを計算する距離部を備え、
前記判定部は、前記第1距離および前記第2距離の少なくとも一方に基づいて、記第1マーカ及び前記第2マーカの設置状態を判定する、
請求項1に記載の測位装置。
【請求項3】
前記判定部は、
前記第1距離と前記第2距離とを比較して、前記第1マーカ及び前記第2マーカの設置状態を判定する、
請求項2に記載の測位装置。
【請求項4】
前記判定部は、
前記第2距離が前記第1距離より大きい場合、前記第2マーカの設置状態が不適切と判定し、
前記第2距離が前記第1距離より大きくない場合、前記第1マーカの設置状態が不適切と判定する、
請求項3に記載の測位装置。
【請求項5】
前記測位装置は、更に、
前記第1距離が所定の閾値以上の場合、前記第1マーカのマーカ測位を開始してから第2マーカのマーカ測位を開始するまでの第1期間の特徴点測位を、前記第2マーカのマーカ測位を開始してから第3マーカのマーカ測位を開始するまでの第2期間において継続する継続部を有する、
請求項2に記載の測位装置。
【請求項6】
前記判定部は、
前記第2マーカの設置状態が不適切と判定した場合、前記継続部が継続した特徴点測位の測位結果を、前記第2期間における測位結果として出力し、
前記第1マーカの設置状態が不適切と判定した場合、前記第2マーカのマーカ測位の測位結果と、前記特徴点測位部が前記第2マーカのマーカ測位の結果を前記移動体の前記過去の位置として用いて計算した測位結果とを、前記第2期間における測位結果として出力する、
請求項5に記載の測位装置。
【請求項7】
前記判定部は、前記第1マーカの設置状態が不適切と判定した場合、前記継続部が継続した特徴点測位の測位結果のうち、前記第2マーカのマーカ測位を開始した時点に対応する特徴点測位の測位結果と、前記第2マーカのマーカ測位の測位結果とに基づいて、前記第1期間における測位結果を補正し出力する、
請求項6に記載の測位装置。
【請求項8】
前記判定部は、前記第2マーカのマーカ測位を開始した時点に対応する特徴点測位の測位結果が、前記第2マーカのマーカ測位の測位結果に一致するための移動量を計算し、前記移動量、前記第1期間の測位結果を移動し出力する、
請求項7に記載の測位装置。
【請求項9】
前記判定部は、前記第2マーカに対して所定回数、設置状態が不適切と判定した場合、前記継続部が継続する特徴点測位の測位結果に基づいて前記第2マーカの位置を計算し、マップ情報に含まれる前記第2マーカの位置を更新する、
請求項5に記載の測位装置。
【請求項10】
前記判定部の判定結果を他の測位装置に通知する通知部、をさらに有する、
請求項1に記載の測位装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、測位装置、移動体、及び測位方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
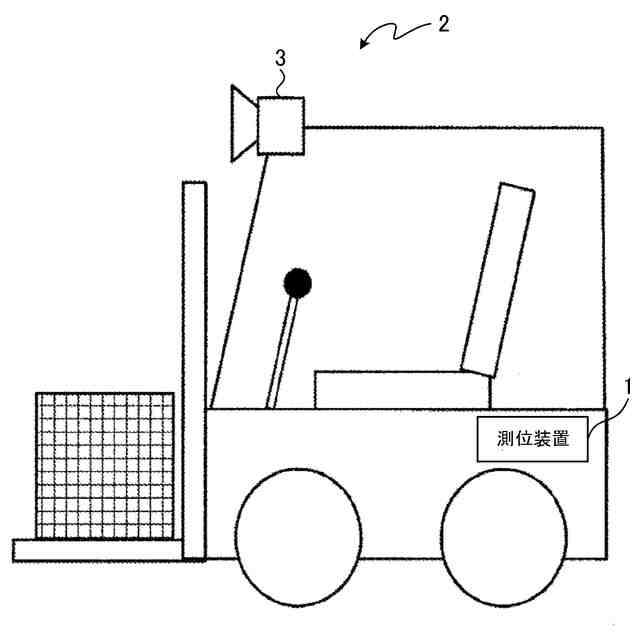
物流倉庫といった屋内において、測位しながら荷物を運搬する移動体がある。特許文献1では、GPS(Global Positioning System)、無線LAN(Local Area Network)測位、及び赤外線測位といった測位技術を用いて、車両の位置を測定する荷物所在管理装置が開示されている。
【0003】
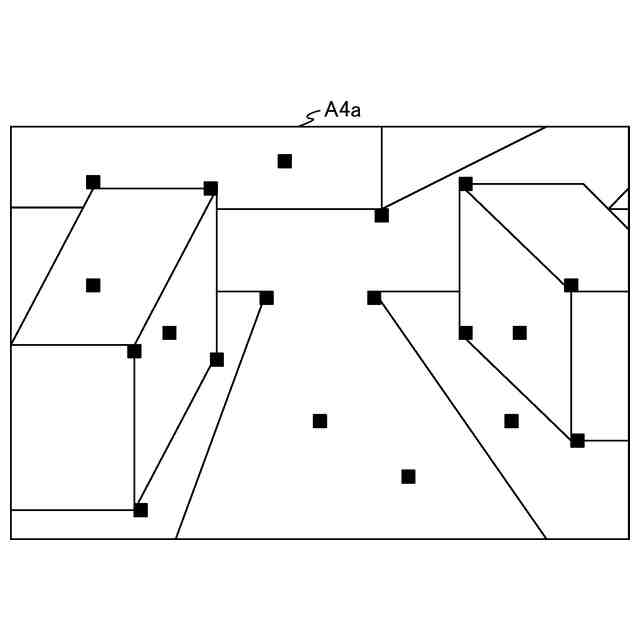
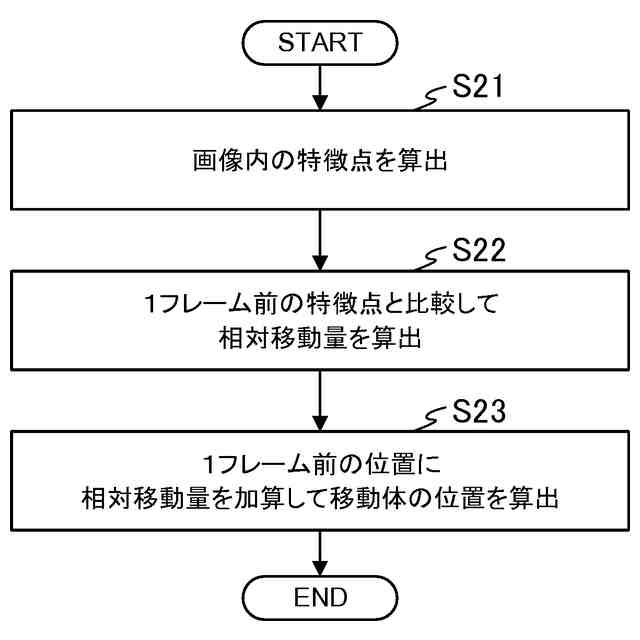
非特許文献1では、Visual-SLAM(Visual Simultaneous Localization and Mapping)と呼ばれる測位方法が開示されている。Visual-SLAMでは、カメラを備えた移動体がその周囲を撮影しながら移動し、撮影した複数の画像における特徴点の移動量に基づいて、移動体の移動量を算出する。これにより、Visual-SLAMでは、移動体の現在の位置を推定したり、移動体の軌跡に基づいて地図を生成したりすることができる。なお、撮影された複数の画像に基づいて、移動体の位置や方向等を算出することは、ビジュアルオドメトリと称される。このビジュアルオドメトリの機能として、撮影された複数の画像における特徴点の移動量に基づいて移動体の移動量を算出してもよい。
【0004】
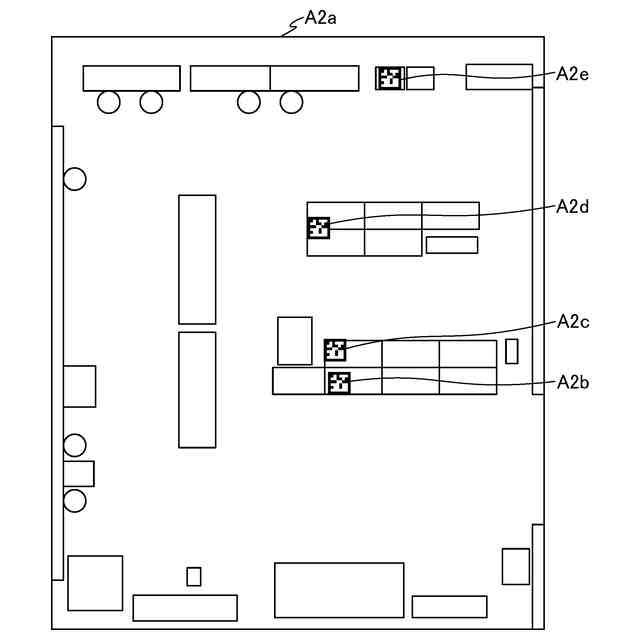
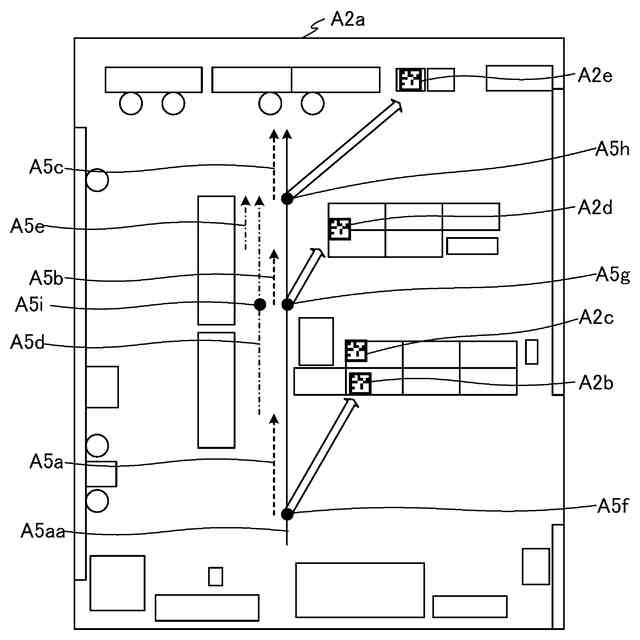
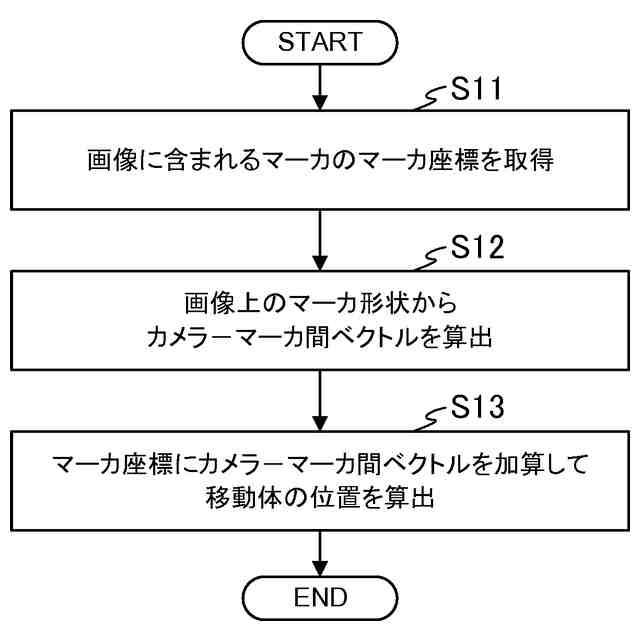
また、測位方法には、マーカを用いた測位方法も知られている。例えば、測位装置は、建築物の柱や壁といった物体に設置(貼付)されるマーカの画像データと、マーカの設置位置とを含むマップ情報を記憶する。マーカ情報と設置位置とは関連付けられる。
【0005】
測位装置は、カメラが撮影するマーカ画像に基づいて、マーカに対する移動体の相対位置を算出する。測位装置は、マップ情報を参照して、カメラが撮影したマーカの設置位置を取得し、取得した設置位置と、算出したマーカに対する移動体の相対位置とに基づいて、移動体のマップ情報のマップ上における位置を算出する。
【先行技術文献】
【特許文献】
【0006】
特開2011-219229号公報
国際公開第2020/137315号
【非特許文献】
【0007】
R. Mur-Artal, et al., "ORB-SLAM2: an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras", IEEE Transactions on Robotics, Volume: 33, Issue: 5, Oct. 2017
【発明の概要】
【発明が解決しようとする課題】
【0008】
マーカを用いた測位方法では、マーカが物体に適切に設置されていなくては正確な測位が行えない。しかし、マーカが物体に適切に設置されていない場合がある。例えば、物体に設置されたマーカが落下して、物体に設置し直される場合、マーカがマップ情報に記憶された設置位置と異なる位置に設置されることがある。また、マーカが上下反転して設置されることがある。このように、マーカが誤った状態(不適切な状態)で物体に設置されると、測位装置の測位結果が誤るという問題がある。
【0009】
本開示の非限定的な実施例は、マーカの設置状態が適切であるか否かを判定する測位装置、移動体、及び測位方法の提供に資する。
【課題を解決するための手段】
【0010】
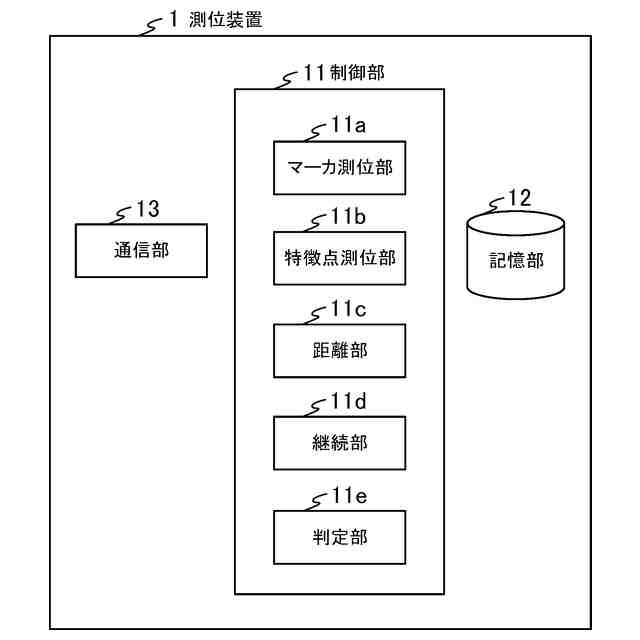
本開示の一実施例に係る測位装置は、移動体に搭載されたカメラから画像データを受信する受信部と、前記画像データに含まれるマーカ画像に基づいて、前記移動体の位置を計算するマーカ測位部と、前記移動体の過去の位置と前記画像データの特徴点とを用いて前記移動体の位置を計算する特徴点測位部と、前記マーカ測位部が第3マーカのマーカ測位によって前記移動体の位置を計算した場合に、前記特徴点測位部が第1マーカのマーカ測位の結果を前記移動体の前記過去の位置として用いて計算した前記移動体の位置と、前記特徴点測位部が第2マーカのマーカ測位の結果を前記移動体の前記過去の位置として用いて計算した前記移動体の位置とのそれぞれと、前記第3マーカのマーカ測位によって計算された前記移動体の位置との差に応じて、前記第1マーカおよび前記第2マーカの設置状態を判定する判定部と、を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
集束超音波の測定機
11日前
個人
センサ制御回路
11日前
甲神電機株式会社
電流センサ
4日前
甲神電機株式会社
電流検出器
4日前
甲神電機株式会社
漏電検出器
4日前
株式会社高橋型精
採尿具
5日前
株式会社トプコン
測量装置
4日前
ダイトロン株式会社
外観検査装置
11日前
アズビル株式会社
熱式流量計
5日前
学校法人東京電機大学
干渉計
12日前
豊田合成株式会社
表示装置
4日前
日本特殊陶業株式会社
ガスセンサ
5日前
株式会社ミトミ技研
圧力測定装置
11日前
シャープ株式会社
収納装置
5日前
TDK株式会社
磁気センサ
11日前
エスペック株式会社
試験装置
12日前
株式会社JVCケンウッド
撮像装置
12日前
株式会社東京久栄
水中移動体用採水器
5日前
アズビル株式会社
ヒータ温度推定装置
12日前
TDK株式会社
温度センサ
5日前
株式会社島津製作所
ガスクロマトグラフ
11日前
横河電機株式会社
光源装置
5日前
ローム株式会社
MEMSデバイス
5日前
ローム株式会社
MEMS装置
11日前
タカハタプレシジョン株式会社
水道メータ
11日前
株式会社テクノメデイカ
採血分注システム
4日前
東ソー株式会社
D-サイロキシン特異的測定方法
11日前
ミネベアミツミ株式会社
位置判定装置
11日前
アズビル株式会社
封止方法および封止部構造
11日前
アズビル株式会社
熱式流量計および補正方法
11日前
トヨタ自動車株式会社
推薦方法
5日前
株式会社ダイフク
発熱検出装置
12日前
三菱重工冷熱株式会社
薄氷雪片による飛雪方法
11日前
旭精機工業株式会社
計測装置及び成形機
12日前
コニカミノルタ株式会社
測光装置及び測光方法
12日前
株式会社ミツトヨ
画像測定機およびプログラム
5日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ