TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025011055
公報種別
公開特許公報(A)
公開日
2025-01-23
出願番号
2024109326
出願日
2024-07-08
発明の名称
決定変数の計算方法
出願人
三顧股ふん有限公司
代理人
個人
,
個人
主分類
G06N
99/00 20190101AFI20250116BHJP(計算;計数)
要約
【課題】確認待ち決定変数を計算するための決定変数の計算方法を提供する。
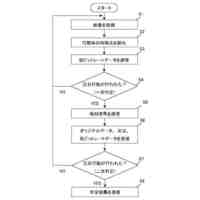
【解決手段】決定変数の計算方法では、まず、機械学習方法によりデータセットを訓練することで生成される訓練済み予測モデルを提供する。次に、訓練済み予測モデルの目的関数を制約付き目的関数から制約なし目的関数に変換して、制約なし目的関数につき最適化問題の解を求める。且つ、解を求める過程で、訓練済み予測モデルを訓練した際のオプティマイザにより、解を求めやすいよう勾配を計算する。また、訓練済み予測モデルを訓練した際のデータセット内のサンプルを用いて、最適化問題の解を求める際の初期サンプルを決定可能である。本発明における決定変数の計算方法では、訓練済み予測モデルの手前にダミー層を増設し、オプティマイザによって、初期サンプルからダミー層と入力層との間のアーク重み値を確認待ち決定変数として取得し始める。
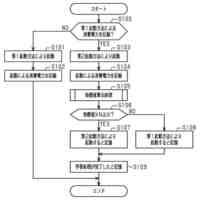
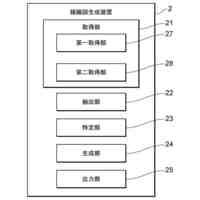
【選択図】図1
特許請求の範囲
【請求項1】
複数の確認待ち決定変数を計算するための決定変数の計算方法であって、
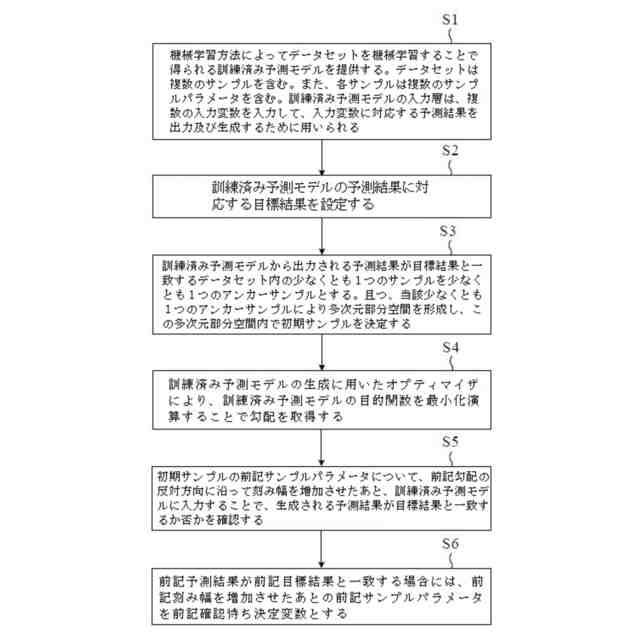
訓練済み予測モデルを提供し、前記訓練済み予測モデルは、機械学習方法によってデータセットを機械学習することで得られ、前記訓練済み予測モデルは入力層及び出力層を含み、前記データセットは複数のサンプルを含み、且つ、各前記サンプルは複数のサンプルパラメータを含み、前記訓練済み予測モデルは、前記入力層を通じて複数の入力変数を入力し、前記出力層により前記入力変数に対応する予測結果を生成するために用いられるステップと、
前記訓練済み予測モデルの前記予測結果に対応する目標結果を設定するステップと、
前記サンプルのうち、前記訓練済み予測モデルの前記予測結果が前記目標結果と一致する少なくとも1つのサンプルを少なくとも1つのアンカーサンプルとし、且つ、前記少なくとも1つのアンカーサンプルにより多次元部分空間を形成し、前記多次元部分空間内で初期サンプルを決定するステップと、
前記訓練済み予測モデルの生成に用いたオプティマイザにより、前記訓練済み予測モデルの目的関数を最小化演算することで勾配を取得するステップと、
前記初期サンプルの前記サンプルパラメータについて、前記勾配の反対方向に沿って刻み幅を増加させたあと、前記訓練済み予測モデルに入力することで、生成される前記予測結果が前記目標結果と一致するか否かを確認するステップと、
前記予測結果が前記目標結果と一致する場合には、前記刻み幅を増加させたあとの前記サンプルパラメータを前記確認待ち決定変数とするステップ、を含む決定変数の計算方法。
続きを表示(約 2,700 文字)
【請求項2】
複数の確認済み決定変数を提供し、前記確認済み決定変数の第1ベクトルを計算するステップと、
前記確認済み決定変数に基づいて、前記サンプルの前記サンプルパラメータから対応する複数の対応サンプルパラメータをそれぞれ取得し、前記対応サンプルパラメータの第2ベクトルを計算するステップと、
前記第1ベクトルと各前記サンプルの前記第2ベクトルを比較するとともに、各前記サンプルが前記訓練済み予測モデルにおいて生成する前記予測結果と前記目標結果を比較することで、前記サンプルから参照サンプルを取得し、前記参照サンプルの前記第2ベクトルは前記第1ベクトルと近似又は一致しており、前記参照サンプルの前記予測結果は前記目標結果と近似又は一致しているステップと、
前記参照サンプルを前記初期サンプルとするステップ、を含む請求項1に記載の決定変数の計算方法。
【請求項3】
決定変数の計算方法であって、
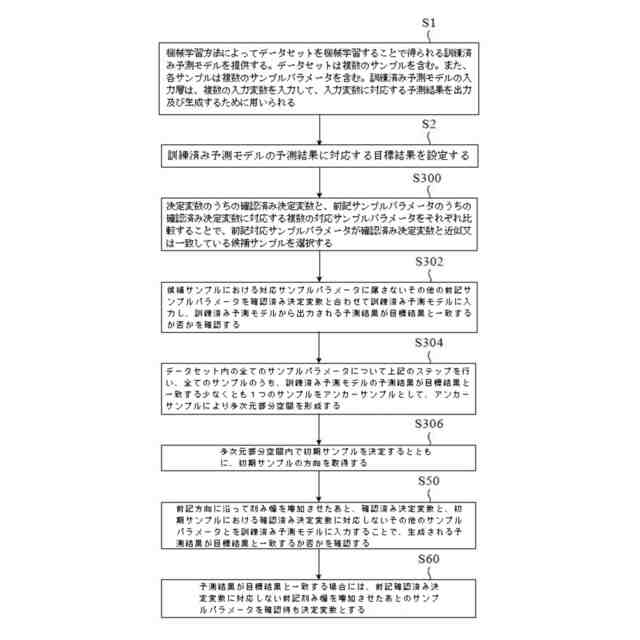
訓練済み予測モデルを提供し、前記訓練済み予測モデルは、機械学習方法によってデータセットを機械学習することで得られ、前記データセットは複数のサンプルを含み、且つ、各前記サンプルは複数のサンプルパラメータを含み、前記訓練済み予測モデルは、複数の決定変数を入力して、前記決定変数に対応する予測結果を生成するために用いられ、前記決定変数は、複数の確認済み決定変数及び複数の確認待ち決定変数を含むステップと、
前記訓練済み予測モデルの前記予測結果に対応する目標結果を設定するステップと、
前記確認済み決定変数と、前記サンプルパラメータのうちの前記確認済み決定変数に対応する複数の対応サンプルパラメータをそれぞれ比較することで、前記対応サンプルパラメータが前記確認済み決定変数と近似又は一致している候補サンプルを選択するステップと、
前記候補サンプルにおける前記対応サンプルパラメータに属さないその他の前記サンプルパラメータを前記確認済み決定変数と合わせて前記訓練済み予測モデルに入力し、前記訓練済み予測モデルから出力される前記予測結果が前記目標結果と一致するか否かを確認するステップと、
前記データセット内の全てのサンプルパラメータについて、前記候補サンプルを選択するとともに、前記予測結果が前記目標結果と一致するか否かを確認する前記ステップを行い、前記候補サンプルのうち、前記訓練済み予測モデルの前記予測結果が前記目標結果と一致する少なくとも1つのサンプルを少なくとも1つのアンカーサンプルとし、且つ、前記少なくとも1つのアンカーサンプルにより多次元部分空間を形成するステップと、
前記多次元部分空間内で初期サンプルを決定するとともに、前記多次元部分空間内で前記初期サンプルの方向を取得するステップと、
前記方向に沿って刻み幅を増加させたあと、前記確認済み決定変数と、前記初期サンプルにおける前記確認済み決定変数に対応しないその他の前記サンプルパラメータとを前記訓練済み予測モデルに入力することで、生成される前記予測結果が前記目標結果と一致するか否かを確認するステップと、
前記予測結果が前記目標結果と一致する場合には、前記確認済み決定変数に対応しない前記刻み幅を増加させたあとの前記サンプルパラメータを前記確認待ち決定変数とするステップ、を含む方法。
【請求項4】
前記確認済み決定変数と、前記サンプルパラメータのうちの前記確認済み決定変数に対応する前記対応サンプルパラメータをそれぞれ比較することで、前記対応サンプルパラメータが前記確認済み決定変数と近似又は一致している前記候補サンプルを選択するステップは、更に、
前記確認済み決定変数の第1ベクトルを計算するステップと、
前記確認済み決定変数に基づいて、前記サンプルの前記サンプルパラメータから対応する前記対応サンプルパラメータをそれぞれ取得するステップと、
前記対応サンプルパラメータの第2ベクトルを計算するステップと、
前記第1ベクトルと各前記サンプルの前記第2ベクトルを比較し、前記サンプルのうちの第1サンプルの前記第2ベクトルが前記第1ベクトルと近似又は一致している場合、前記第1サンプルを前記候補サンプルとして選択するステップ、を含む請求項3に記載の決定変数の計算方法。
【請求項5】
更に、
前記第1ベクトルと各前記サンプルの前記第2ベクトルとの間の夾角を計算し、前記第1ベクトルとの間に最も小さな前記夾角を有する前記第2ベクトルに対応する前記サンプルを前記第1サンプルとするステップ、を含む請求項4に記載の決定変数の計算方法。
【請求項6】
更に、
距離関数により、前記第1ベクトルの先端点の座標と各前記サンプルの前記第2ベクトルの先端点の座標との距離を計算し、前記第1ベクトルとの間に最も小さな前記距離を有する前記第2ベクトルに対応する前記サンプルを前記第1サンプルとするステップ、を含む請求項4に記載の決定変数の計算方法。
【請求項7】
前記多次元部分空間内で前記初期サンプルを決定するステップは、更に、
前記多次元部分空間内の少なくとも2つの前記アンカーサンプルの間の距離の中点を前記初期サンプルとするステップ、を含む請求項3に記載の決定変数の計算方法。
【請求項8】
前記多次元部分空間内で前記初期サンプルを決定するステップは、更に、
前記多次元部分空間内の少なくとも2つの前記アンカーサンプルの線形結合を前記初期サンプルとするステップ、を含む請求項3に記載の決定変数の計算方法。
【請求項9】
前記多次元部分空間内で前記初期サンプルの前記方向を取得するステップは、更に、
数値解析法により、各前記アンカーサンプルに沿う前記初期サンプルの第1方向導関数を前記初期サンプルの前記方向として計算するステップ、を含む請求項3に記載の決定変数の計算方法。
【請求項10】
前記多次元部分空間内で前記初期サンプルの前記方向を取得するステップは、更に、
前記初期サンプルを原点に設定し、数値解析法により、各前記アンカーサンプルに向かう前記原点の第2方向導関数を前記初期サンプルの前記方向として計算するステップ、を含む請求項3に記載の決定変数の計算方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、決定変数の計算方法に関し、特に、最適化技術をベースとするアルゴリズム、人工知能モデルに内蔵されるオプティマイザ、及び、訓練済み予測モデルを応用して決定変数を逆推定する方法に関する。
続きを表示(約 3,900 文字)
【背景技術】
【0002】
医用工学技術の進歩に伴って、現在、疾病の臨床治療における再生医療の応用はますます多様化している。再生医療とは、主として、損傷した組織や器官を細胞の再生能力を利用して修復する医療技術であり、応用範囲が非常に広い。また、組織工学や分子生物学等の医療技術を組み合わせることで、例えば、糖尿病、神経疾患、心血管疾患及び癌等のかつては治療困難とされていた疾病の改善及び治療が可能になることが期待されている。現在、再生医療は、主に、器官の修復、免疫細胞治療及び幹細胞療法に応用されている。また、再生医療における細胞治療の研究及び応用は各界からますます注目を浴びている。細胞治療とは、人体の細胞を体外で培養又は加工する手順を経たあと、それらの細胞を個々の体内に移植して使用するものである。
【0003】
近年、多くの国の政府が細胞治療の応用を徐々に解禁していることから、国内外の多くの学者が相次いで細胞治療の研究に参入している。その結果、例えば、自家線維芽細胞による皮膚欠損の治療、自家軟骨細胞による膝関節軟骨欠損の治療、自家骨髄間葉系幹細胞による脊髄損傷の治療など、多くの疾病の治療において、細胞治療は著しい研究の進歩を遂げている。また、細胞治療の製品の品質は、治療の安全性及び有効性に直接的な影響を及ぼす。そのため、細胞培養プロセスでは、細胞の成長状態を厳格にコントロールするとともに、細胞成長の培養パラメータ及び環境パラメータを即時にモニタリングして、培養過程における細胞の汚染又は品質の悪化を回避する必要がある。また、従来の研究より、異なる事案間で細胞の多様性(variability)は極めて高くなるため、異なる事案に適用される細胞製剤の最適な培養パラメータ及び環境パラメータは完全には同じとならないことが分かっている。これより、細胞製剤ごとに、プロセス内で各プロセスパラメータを設計及び調整して所期の結果を達成する必要があるため、固定のプロセスパラメータで各細胞製剤の生産を行うことはできない。そのほか、プロセスの複雑性及び相関性に起因して、従来技術では、通常、単一のパラメータのみを最適化可能であり、プロセス全体における各パラメータ間の相互の総合的な影響については軽視されている。
【0004】
従来技術では、機械学習によって大量のサンプルのデータセットについて訓練を行い、予測モデルを取得する。この予測モデルは、各種プロセスパラメータを入力して細胞培養の予測結果を生成することが可能なため、ユーザは、設計する細胞培養プロセスの効果を事前にシミュレーションできる。しかしながら、機械学習で訓練される上記の予測モデルでは、ユーザの所期の結果から細胞培養プロセスのプロセスパラメータを逆推定することはできない。換言すると、細胞培養プロセスを設計する際に、ユーザは、異なるプロセスパラメータを大量に試す必要があるため、細胞培養プロセスの設計及び改良に大量の労力と資源が費やされる。また、細胞プロセスのほか、その他の分野で機械学習により得られる予測モデルについても、決定変数を逆推定できないとの問題が存在する。
【0005】
よって、従来技術の課題を解決するために、訓練済み予測モデルを用いて、目標結果に合致する決定変数を正確に逆推定可能とする方法を開発する必要がある。
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記に鑑みて、本発明は、以上で述べた従来の課題を解決するために、決定変数の計算方法を提供することを範疇とする。
【課題を解決するための手段】
【0007】
本発明における複数の確認待ち決定変数を計算するための決定変数の計算方法は、訓練済み予測モデルを提供し、前記訓練済み予測モデルは、機械学習方法によってデータセットを機械学習することで得られ、前記訓練済み予測モデルは入力層及び出力層を含み、前記データセットは複数のサンプルを含み、且つ、各前記サンプルは複数のサンプルパラメータを含み、前記訓練済み予測モデルは、前記入力層を通じて複数の入力変数を入力し、前記出力層により前記入力変数に対応する予測結果を生成するために用いられるステップと、前記訓練済み予測モデルの前記予測結果に対応する目標結果を設定するステップと、前記サンプルのうち、前記訓練済み予測モデルの前記予測結果が前記目標結果と一致する少なくとも1つのサンプルを少なくとも1つのアンカーサンプルとし、且つ、前記少なくとも1つのアンカーサンプルにより多次元部分空間を形成し、前記多次元部分空間内で初期サンプルを決定するステップと、前記訓練済み予測モデルの生成に用いたオプティマイザにより、前記訓練済み予測モデルの目的関数を最小化演算することで勾配を取得するステップと、前記初期サンプルの前記サンプルパラメータについて、前記勾配の反対方向に沿って刻み幅を増加させたあと、前記訓練済み予測モデルに入力することで、生成される前記予測結果が前記目標結果と一致するか否かを確認するステップと、前記予測結果が前記目標結果と一致する場合には、前記刻み幅を増加させたあとの前記サンプルパラメータを前記確認待ち決定変数とするステップ、を含む。
【0008】
決定変数の計算方法は、更に、複数の確認済み決定変数を提供し、前記確認済み決定変数の第1ベクトルを計算するステップと、前記確認済み決定変数に基づいて、前記サンプルの前記サンプルパラメータから対応する複数の対応サンプルパラメータをそれぞれ取得し、前記対応サンプルパラメータの第2ベクトルを計算するステップと、前記第1ベクトルと各前記サンプルの前記第2ベクトルを比較するとともに、各前記サンプルが前記訓練済み予測モデルにおいて生成する前記予測結果と前記目標結果を比較することで、前記サンプルから参照サンプルを取得し、前記参照サンプルの前記第2ベクトルは前記第1ベクトルと近似又は一致しており、前記参照サンプルの前記予測結果は前記目標結果と近似又は一致しているステップと、前記参照サンプルを前記初期サンプルとするステップ、を含む。
【0009】
本発明は、更に、訓練済み予測モデルを提供し、前記訓練済み予測モデルは、機械学習方法によってデータセットを機械学習することで得られ、前記データセットは複数のサンプルを含み、且つ、各前記サンプルは複数のサンプルパラメータを含み、前記訓練済み予測モデルは、複数の決定変数を入力して、前記決定変数に対応する予測結果を生成するために用いられ、前記決定変数は、複数の確認済み決定変数及び複数の確認待ち決定変数を含むステップと、前記訓練済み予測モデルの前記予測結果に対応する目標結果を設定するステップと、前記確認済み決定変数と、前記サンプルパラメータのうちの前記確認済み決定変数に対応する複数の対応サンプルパラメータをそれぞれ比較することで、前記対応サンプルパラメータが前記確認済み決定変数と近似又は一致している候補サンプルを選択するステップと、前記候補サンプルにおける前記対応サンプルパラメータに属さないその他の前記サンプルパラメータを前記確認済み決定変数と合わせて前記訓練済み予測モデルに入力し、前記訓練済み予測モデルから出力される前記予測結果が前記目標結果と一致するか否かを確認するステップと、前記データセット内の全てのサンプルパラメータについて上記のステップを行い、前記サンプルのうち、前記訓練済み予測モデルの前記予測結果が前記目標結果と一致する少なくとも1つのサンプルを少なくとも1つのアンカーサンプルとし、且つ、前記少なくとも1つのアンカーサンプルにより多次元部分空間を形成するステップと、前記多次元部分空間内で初期サンプルを決定するとともに、前記多次元部分空間内で前記初期サンプルの方向を取得するステップと、前記方向に沿って刻み幅を増加させたあと、前記確認済み決定変数と、前記初期サンプルにおける前記確認済み決定変数に対応しないその他の前記サンプルパラメータとを前記訓練済み予測モデルに入力することで、生成される前記予測結果が前記目標結果と一致するか否かを確認するステップと、前記予測結果が前記目標結果と一致する場合には、前記確認済み決定変数に対応しない前記刻み幅を増加させたあとの前記サンプルパラメータを前記確認待ち決定変数とするステップ、を含む決定変数の計算方法を提供する。
【0010】
前記確認済み決定変数と、前記サンプルパラメータのうちの前記確認済み決定変数に対応する前記対応サンプルパラメータをそれぞれ比較することで、前記対応サンプルパラメータが前記確認済み決定変数と近似又は一致している前記候補サンプルを選択するステップは、更に、前記確認済み決定変数の第1ベクトルを計算するステップと、前記確認済み決定変数に基づいて、前記サンプルの前記サンプルパラメータから対応する前記対応サンプルパラメータをそれぞれ取得するステップと、前記対応サンプルパラメータの第2ベクトルを計算するステップと、前記第1ベクトルと各前記サンプルの前記第2ベクトルを比較し、前記サンプルのうちの第1サンプルの前記第2ベクトルが前記第1ベクトルと近似又は一致している場合、前記第1サンプルを前記候補サンプルとして選択するステップ、を含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
物品給付年金
25日前
個人
政治のAI化
20日前
個人
RFタグ読取装置
1か月前
個人
在宅介護システム
1か月前
個人
プラグインホームページ
11日前
個人
AI飲食最適化プラグイン
1か月前
キヤノン株式会社
通信装置
26日前
個人
電話管理システム及び管理方法
1か月前
個人
全アルゴリズム対応型プログラム
21日前
キヤノン株式会社
画像処理装置
18日前
株式会社CROSLAN
支援装置
1か月前
大同特殊鋼株式会社
輝線検出方法
20日前
シャープ株式会社
電子機器
20日前
個人
決済手数料0%のクレジットカード
今日
村田機械株式会社
割当補助システム
3日前
株式会社アジラ
データ転送システム
20日前
トヨタ自動車株式会社
欠け検査装置
20日前
ひびきの電子株式会社
認証システム
1か月前
ミサワホーム株式会社
情報処理装置
25日前
長屋印刷株式会社
画像形成システム
1か月前
トヨタ自動車株式会社
情報処理装置
3日前
パテントフレア株式会社
交差型バーコード
13日前
ミサワホーム株式会社
宅配ロッカー
17日前
オベック実業株式会社
端末用スタンド
21日前
応研株式会社
業務支援システム
11日前
オムロン株式会社
回転装置及びマウス
1か月前
株式会社ユピテル
電子機器及びプログラム等
28日前
トヨタ自動車株式会社
管理装置
17日前
Sansan株式会社
組織図生成装置
6日前
株式会社大林組
施工管理システム
13日前
株式会社カプコン
データおよびシステム
19日前
西日本電信電話株式会社
分析装置
12日前
ミサワホーム株式会社
荷物搬送システム
17日前
シャープ株式会社
通信装置
10日前
西日本電信電話株式会社
評価装置
12日前
個人
株管理システム
14日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ