TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025003185
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023103716
出願日
2023-06-23
発明の名称
流量監視方法、流量監視装置及び流量監視システム
出願人
川崎重工業株式会社
,
国立大学法人埼玉大学
代理人
弁理士法人有古特許事務所
主分類
G05B
23/02 20060101AFI20241226BHJP(制御;調整)
要約
【課題】配管内の粉粒体の流量変化の検出精度を向上する流量監視方法等を提供する。
【解決手段】流量監視方法は、粉粒体が流れる配管で第1期間に発生する振動のデータである第1データを取得することと、前記第1データの前記第1期間を、複数の時間区間である複数のフレームにより区分することと、前記複数のフレームそれぞれに対応する前記第1データの対応部分における周波数特性を検出すること、前記複数のフレームでの周波数特性に基づき、前記第1データの第1特徴量を検出することと、前記第1特徴量と第1閾値とを比較することによって、前記粉粒体の流量を監視することとを含む。
【選択図】図1
特許請求の範囲
【請求項1】
粉粒体が流れる配管で第1期間に発生する振動のデータである第1データを取得することと、
前記第1データの前記第1期間を、複数の時間区間である複数のフレームにより区分することと、
前記複数のフレームそれぞれに対応する前記第1データの対応部分における周波数特性を検出すること、
前記複数のフレームでの周波数特性に基づき、前記第1データの第1特徴量を検出することと、
前記第1特徴量と第1閾値とを比較することによって、前記粉粒体の流量を監視することとを含む
流量監視方法。
続きを表示(約 2,000 文字)
【請求項2】
前記対応部分を周波数解析することで前記対応部分の周波数成分を、前記周波数特性として検出することと、
隣り合う前記フレーム間における周波数成分の変動量を検出することと、
隣り合う前記フレーム間における周波数成分の変動量に基づき、前記第1特徴量を検出することとを含む
請求項1に記載の流量監視方法。
【請求項3】
前記周波数成分の変動量の検出では、
前記周波数成分それぞれに対応する複数の周波数帯域の全てについて、隣り合う前記フレーム間で同じ周波数帯域の周波数成分の差異を検出し、
前記複数の周波数帯域での前記差異の和を、前記周波数成分の変動量として検出する
請求項2に記載の流量監視方法。
【請求項4】
前記第1期間よりも前の第2期間で前記配管で発生した振動データである第2データについて過去に検出した第2特徴量を取得することと、
前記第1特徴量と前記第2特徴量との平均値と、前記第1閾値とを比較することによって、前記粉粒体の流量を監視することとを含む
請求項1に記載の流量監視方法。
【請求項5】
前記第1期間よりも前のN個(Nは、2以上の自然数)の第(i+1)期間(i=1,2,・・・,N)でのN個の第(i+1)データについてのN個の第(i+1)特徴量を取得することと、
前記第1特徴量とN個の前記第(i+1)特徴量とを用いて移動平均値を算出することと、
前記移動平均値と前記第1閾値とを比較することによって、前記粉粒体の流量を監視することとを含む
請求項1に記載の流量監視方法。
【請求項6】
前記第1特徴量とN個の前記第(i+1)特徴量とを用いて複数の移動平均値を算出することと、
前記複数の移動平均値のいずれかが前記第1閾値以下である場合、前記粉粒体の流量が正常ではないと決定することとを含む
請求項5に記載の流量監視方法。
【請求項7】
前記第1特徴量が第2閾値を超える場合、前記第1期間よりも前の第2期間で前記配管で発生した振動データである第2データについて過去に検出した第2特徴量を取得することと、
前記第1特徴量と前記第2特徴量との平均値を、前記第1特徴量に決定することとを含む
請求項1から6のいずれか一項に記載の流量監視方法。
【請求項8】
前記第1特徴量が第2閾値を超える場合、前記第1期間よりも前のM個(Mは、2以上の自然数)の第(j+1)期間(i=1,2,・・・,N)でのM個の第(j+1)データについてのM個の第(j+1)特徴量を取得することと、
前記第1特徴量とM個の前記第(j+1)特徴量との平均値を、前記第1特徴量に決定することとを含む
請求項1から6のいずれか一項に記載の流量監視方法。
【請求項9】
第1粉粒体と第2粉粒体との混合体が流れる配管で発生した振動データを、前記第1データとして取得することと、
前記第1データの前記対応部分を周波数解析することで前記対応部分の周波数成分を、前記周波数特性として検出することと、
前記対応部分において、前記周波数成分が形成する第1ピーク部分及び第2ピーク部分を検出することと、
前記対応部分の周波数成分を、前記第1ピーク部分に対応する部分を含む前記第1粉粒体の第1周波数成分と、前記第2ピーク部分に対応する部分を含む前記第2粉粒体の第2周波数成分とに分割することと、
隣り合う前記フレーム間における前記第1周波数成分の変動量を検出することと、
隣り合う前記フレーム間における前記第1周波数成分の変動量に基づき、前記第1粉粒体の前記第1特徴量を検出することと、
隣り合う前記フレーム間における前記第2周波数成分の変動量を検出することと、
隣り合う前記フレーム間における前記第2周波数成分の変動量に基づき、前記第2粉粒体の前記第1特徴量を検出することと、
前記第1粉粒体の前記第1特徴量と前記第1粉粒体の前記第1特徴量とを比較し且つ前記第2粉粒体の前記第1特徴量と前記第2粉粒体の前記第1閾値とを比較することによって、前記第1粉粒体及び前記第2粉粒体の流量を監視することとを含む
請求項1に記載の流量監視方法。
【請求項10】
前記配管に取り付けられ且つ前記配管での振動を検出するセンサから検出信号を受け取ることと、
前記検出信号から前記第1期間毎の検出信号を、前記第1データとして切り出すことと、
前記粉粒体の流量を監視する処理を前記第1期間毎に繰り返し行うこととを含む
請求項1に記載の流量監視方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、粉粒体の流量監視方法、流量監視装置及び流量監視システムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
例えば、特許文献1は、粒状化された廃棄物プラスチックを輸送する輸送配管の詰まりを検知する方法を開示する。音響センサが、輸送管に取り付けられる。音響センサによって検知される粉粒体の衝突音が周波数解析され、周波数スペクトルが規定値を下回った場合に、配管詰まりが発生したと判断される。上記判断では、配管内の廃棄物プラスチックの衝突音の特徴的な周波数帯域3kHz(キロヘルツ)-6kHZに含まれる複数のピークのスペクトル値の合計が規定値と比較される。
【先行技術文献】
【特許文献】
【0003】
特開2001-206546号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の検知方法は、配管詰まりの発生のように廃棄物プラスチックの流量の大きい変化の発生を検知するが、大きくない流量の変化を検知できない可能性がある。本開示は、配管内の粉粒体の流量変化の検出精度を向上する流量監視方法、流量監視装置及び流量監視システムを提供する。
【課題を解決するための手段】
【0005】
本開示の一態様に係る流量監視方法は、粉粒体が流れる配管で第1期間に発生する振動のデータである第1データを取得することと、前記第1データの前記第1期間を、複数の時間区間である複数のフレームにより区分することと、前記複数のフレームそれぞれに対応する前記第1データの対応部分における周波数特性を検出すること、前記複数のフレームでの周波数特性に基づき、前記第1データの第1特徴量を検出することと、前記第1特徴量と第1閾値とを比較することによって、前記粉粒体の流量を監視することとを含む。
【図面の簡単な説明】
【0006】
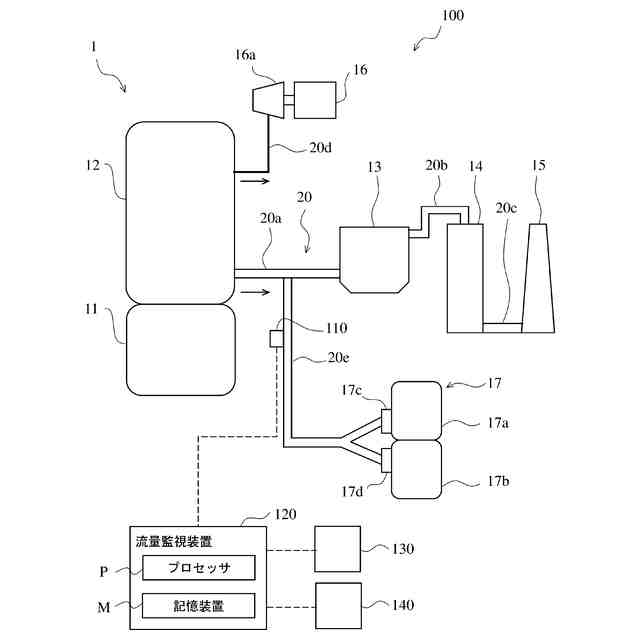
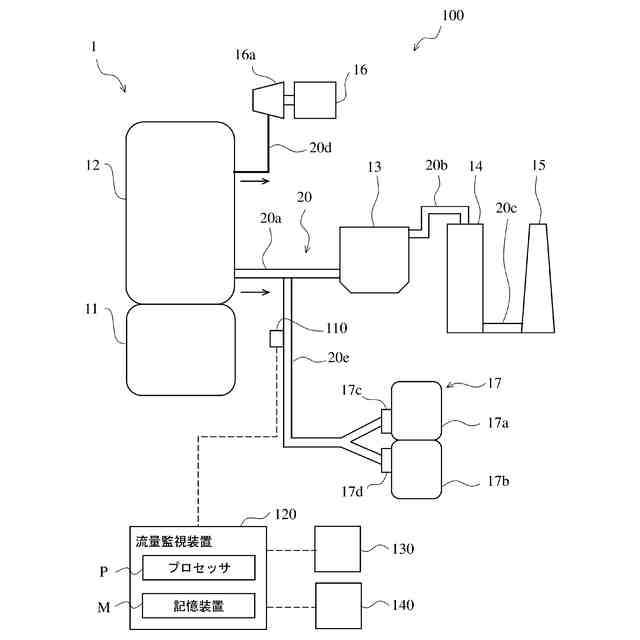
図1は、例示的な実施の形態に係る流量監視システムの構成の一例を示す図である。
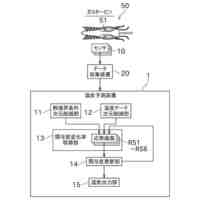
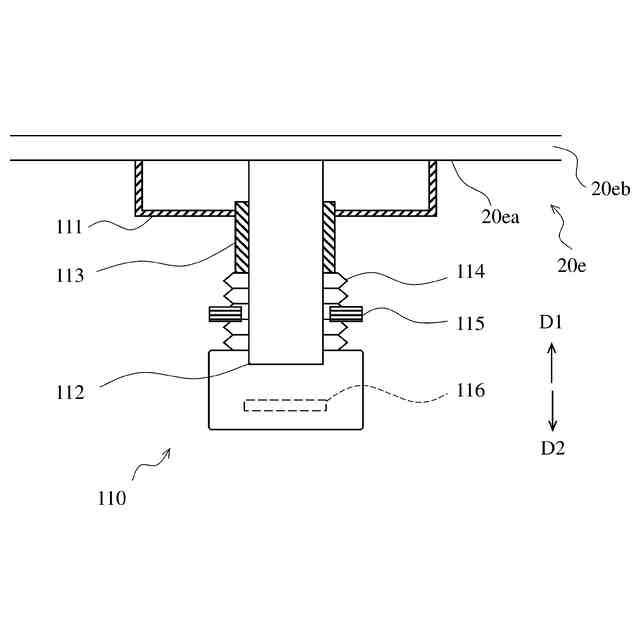
図2は、実施の形態に係るセンサの構成の一例を示す断面側面図である。
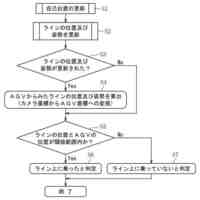
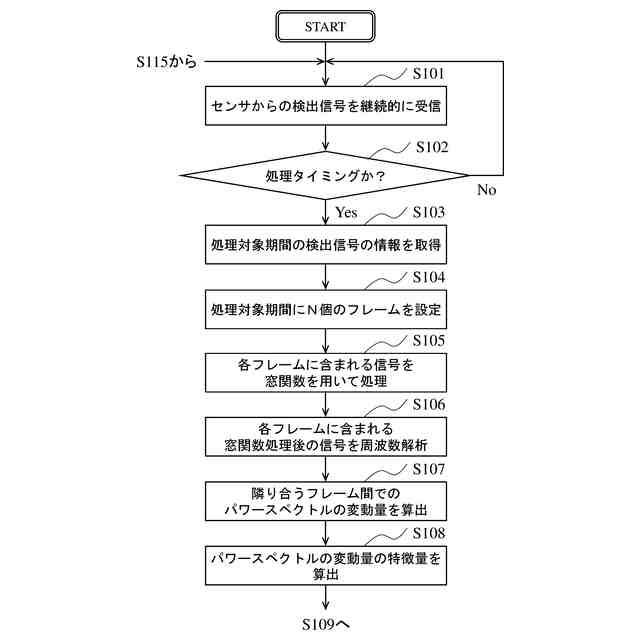
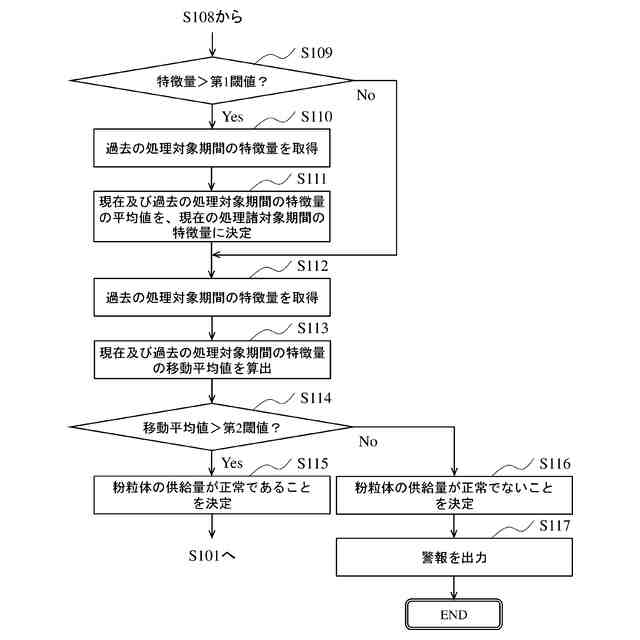
図3は、実施の形態に係る流量監視装置の単体モードでの動作の一例を示すフローチャートである。
図4は、実施の形態に係る流量監視装置の単体モードでの動作の一例を示すフローチャートである。
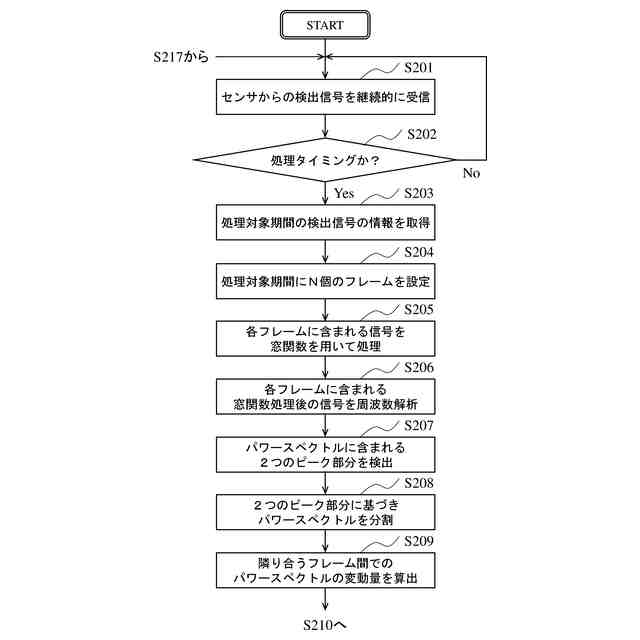
図5は、処理対象期間の検出信号に対してN個のフレームFを設定する例を示す図である。
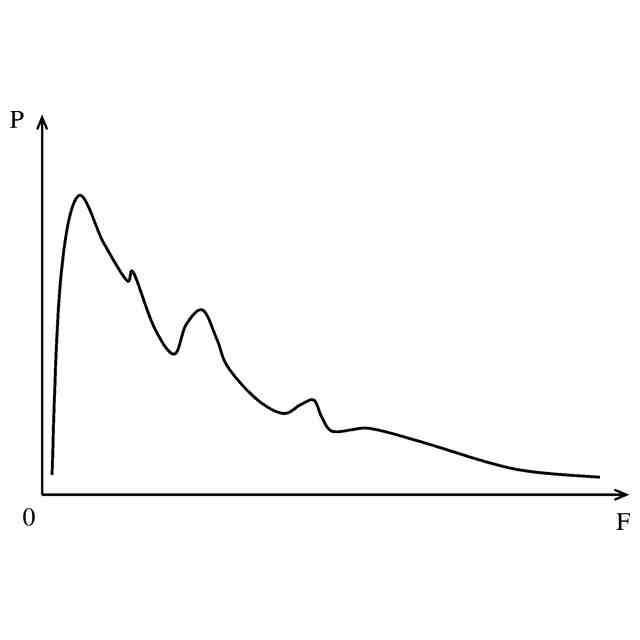
図6は、1つのフレームの周波数解析処理結果の一例を示す図である。
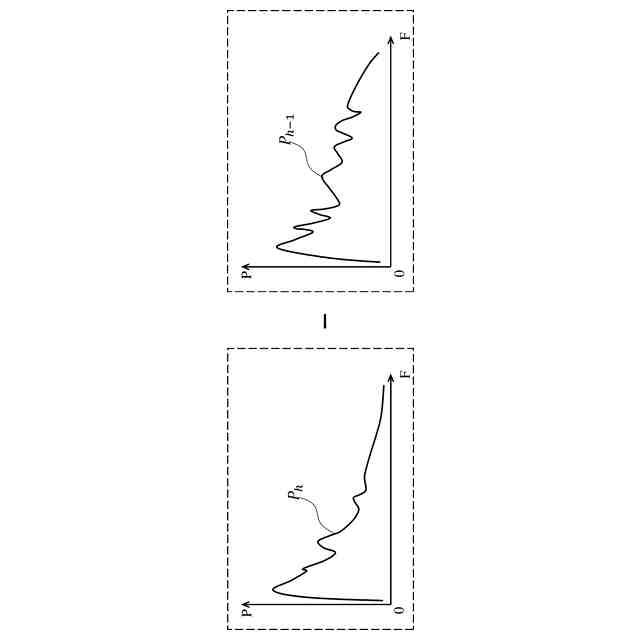
図7は、2つのフレーム間のパワースペクトルの変動量の算出方法のイメージ図である。
図8は、実施の形態に係る流量監視装置の混合モードでの動作の一例を示すフローチャートである。
図9は、実施の形態に係る流量監視装置の混合モードでの動作の一例を示すフローチャートである。
図10は、混合モードにおける1つのフレームの周波数解析処理結果の一例を示す図である。
【発明を実施するための形態】
【0007】
以下において、本開示の例示的な実施の形態を、図面を参照しつつ説明する。以下で説明する実施の形態は、いずれも包括的又は具体的な例を示すものである。以下の実施の形態における構成要素のうち、最上位概念を示す独立請求項に記載されていない構成要素については、任意の構成要素として説明される。添付の図面における各図は、模式的な図であり、必ずしも厳密に図示されたものでない。各図において、実質的に同一の構成要素に対しては同一の符号を付しており、重複する説明は省略又は簡略化される場合がある。本明細書及び請求項では、「装置」とは、1つの装置を意味し得るだけでなく、複数の装置を含むシステムも意味し得る。「装置」は、「設備」も含み得る。
【0008】
図1を参照しつつ、例示的な実施の形態に係る流量監視システム100の構成を説明する。図1は、例示的な実施の形態に係る流量監視システム100の構成の一例を示す図である。流量監視システム100は、配管内を流れる粉粒体の流量の変化を監視する。限定されないが、本実施の形態では、流量監視システム100は、プラント1に含まれる配管20内を流れる粉粒体の流量を監視する。
【0009】
粉粒体は、固体粒子の集合体であり、固体的ではあるが外力に応じて流動するという流体的な性質を有する。本明細書及び請求項において、「粉粒体」は、「粉体」、「粒体」、並びに、「粉体及び粒体の混合物」を含む。粉体は、粒子径が1mm未満の粒子の集合体であってもよい。粉体は、粉体、微粉体及び超微粉体に分類される場合の粉体、微粉体及び超微粉体のいずれをも含み得る。例えば、上記のように分類される粉体は、粒子径が3μm(マイクロメートル)以上1mm(ミリメートル)未満の粒子の集合体であってもよく、微粉体は、粒子径が0.01μm以上10μm以下の粒子の集合体であってもよく、超微粉体は、粒子径が0.0001μm以上0.3μm以下の粒子の集合体であってもよい。粒体は、粒子径が1mm以上の粒子の集合体であってもよい。粒体は、例えば、粒子径が数mm以上の粒子を含んでもよく、粒子径が数十mm以上の粒子を含んでもよい。
【0010】
流量監視システム100は、センサ110と、流量監視装置120と、入力装置130と、出力装置140とを構成要素として含む。流量監視システム100は、上述した構成要素の全てを含む必要はない。流量監視システム100は、プラント1を構成要素として含んでもよい。プラント1は、流量監視システム100の監視対象である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
温度推移解析装置及び温度推移解析方法
10日前
川崎重工業株式会社
作業管理システムおよびそれに用いられる情報処理装置
18日前
川崎重工業株式会社
水素のトレーサビリティデータ管理システムおよび管理方法
11日前
エイブリック株式会社
基準電圧回路
17日前
和研工業株式会社
多連レバー機構
1か月前
株式会社クボタ
作業車
20日前
株式会社ダイフク
搬送車
20日前
ローム株式会社
半導体集積回路
25日前
エイブリック株式会社
ボルテージレギュレータ
17日前
トヨタ自動車株式会社
工作機械の制御装置
18日前
トヨタ自動車株式会社
工作機械の制御装置
19日前
株式会社ダイフク
物品搬送設備
18日前
株式会社やまびこ
走行制御装置
5日前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御装置および制御方法
1か月前
株式会社ダイヘン
搬送車
17日前
株式会社ダイヘン
搬送車
17日前
株式会社ダイヘン
搬送車
17日前
株式会社ダイヘン
搬送車
17日前
井関農機株式会社
作業車両
13日前
トヨタ自動車株式会社
群制御システム及び群制御方法
1か月前
株式会社デンソー
診断装置
3日前
ミツミ電機株式会社
多方向入力装置
23日前
ミツミ電機株式会社
多方向入力装置
23日前
ミツミ電機株式会社
多方向入力装置
23日前
オルガノ株式会社
運転管理方法及び運転管理装置
20日前
ミツミ電機株式会社
多方向入力装置
23日前
ローム株式会社
バイアス回路
19日前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
23日前
ダイハツ工業株式会社
無人搬送車の制御方法
18日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ