TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025002453
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023102641
出願日
2023-06-22
発明の名称
位置検出装置
出願人
株式会社デンソー
,
株式会社SOKEN
代理人
弁理士法人ゆうあい特許事務所
主分類
G01D
5/12 20060101AFI20241226BHJP(測定;試験)
要約
【課題】2つの回転部材の相対位置を精度良く検出可能な位置検出装置を提供すること。
【解決手段】
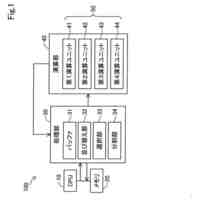
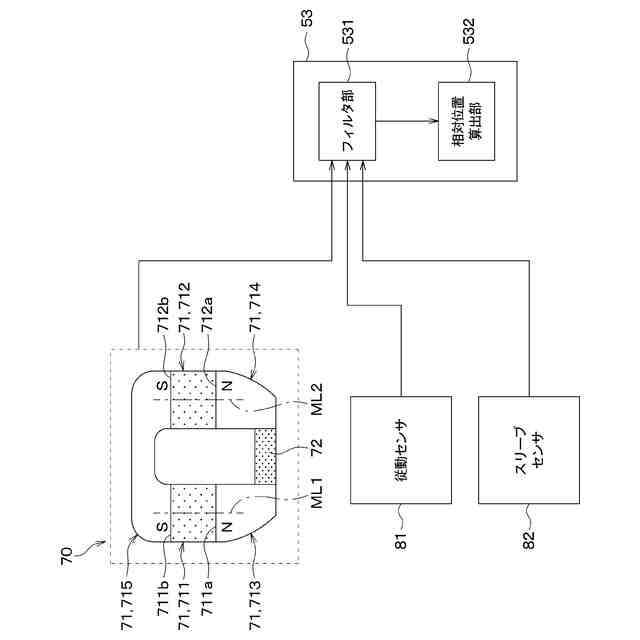
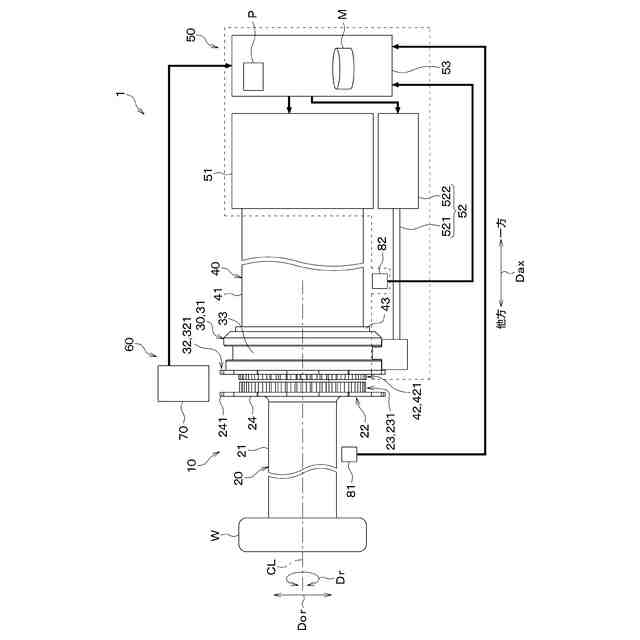
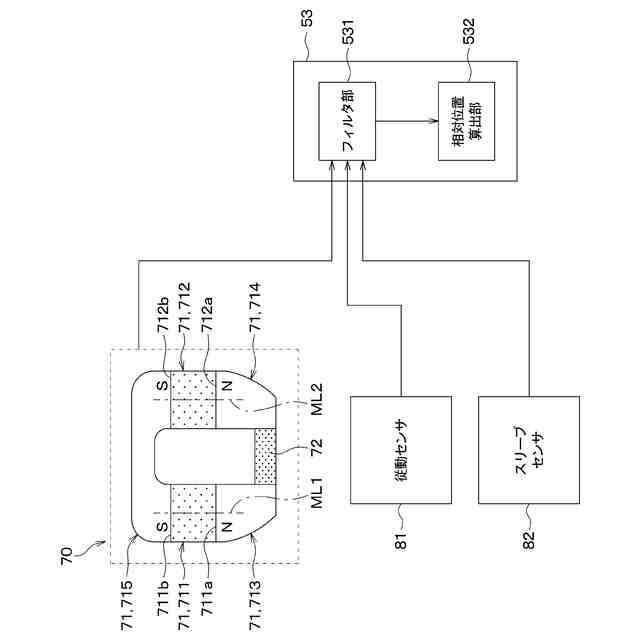
複数の第1ギア歯を有する第1回転部材と複数の第2ギア歯を有する第2回転部材とを備える動力伝達装置に適用される位置検出装置は、第1ギア歯と第2ギア歯との相対的な位置関係に応じた信号を、周波数成分を含む位置信号として出力する位置センサ70と、第1回転部材の回転数に応じた第1回転信号を出力する第1回転センサ81と、第2回転部材の回転数に応じた第2回転信号を出力する第2回転センサ82と、位置センサが出力する位置信号から上側周波数以上の周波数成分および下側周波数以下の周波数成分を除去したフィルタ信号を出力するフィルタ部531と、を備える。フィルタ部は、第1回転センサが出力する第1回転信号に基づいて上側周波数を変化させるとともに、第2回転センサが出力する第2回転信号に基づいて下側周波数を変化させる。
【選択図】図8
特許請求の範囲
【請求項1】
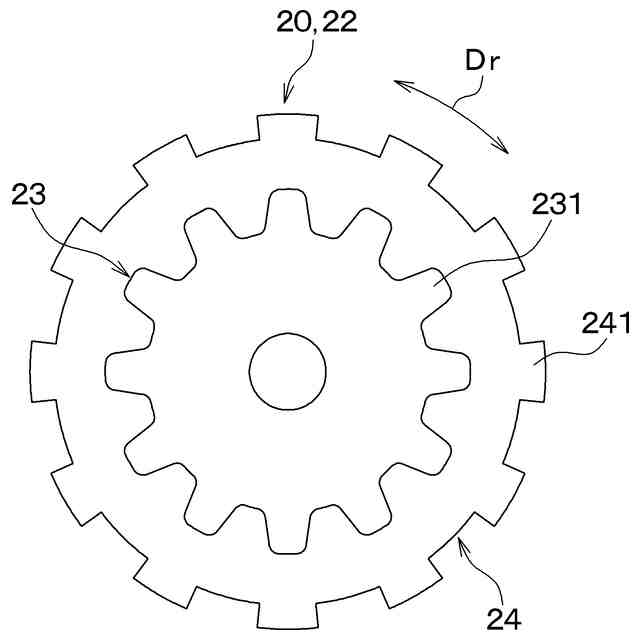
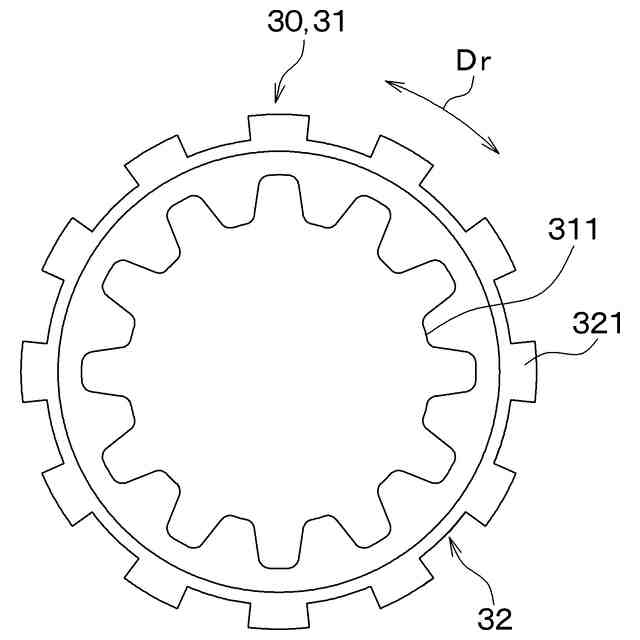
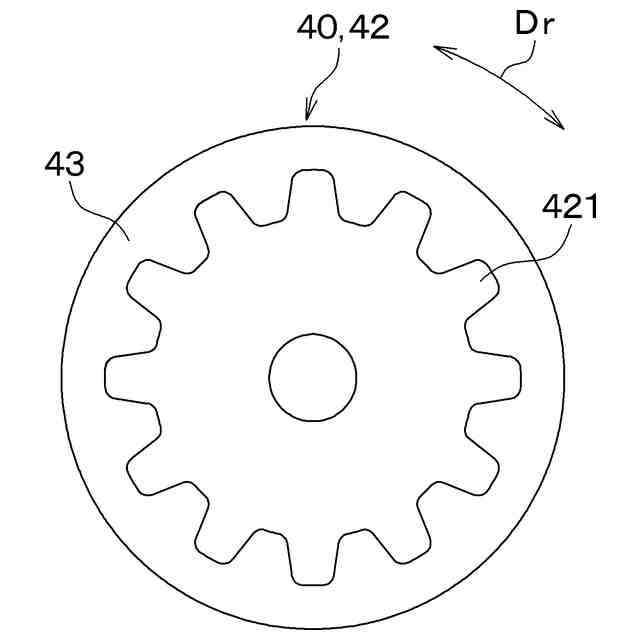
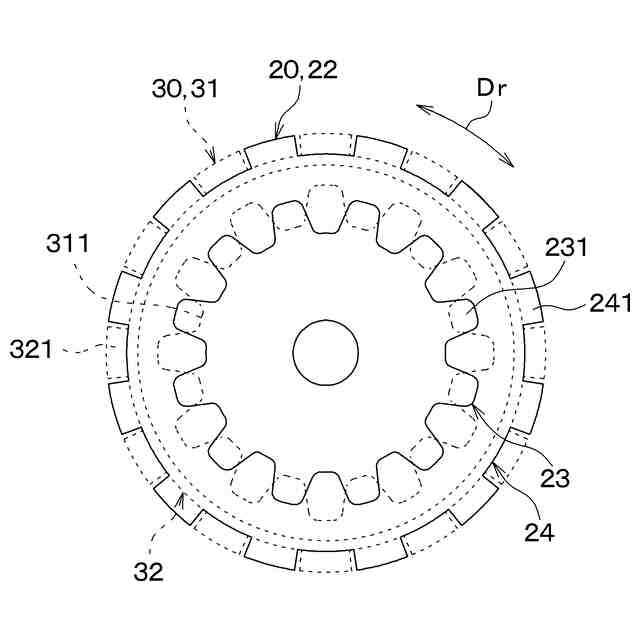
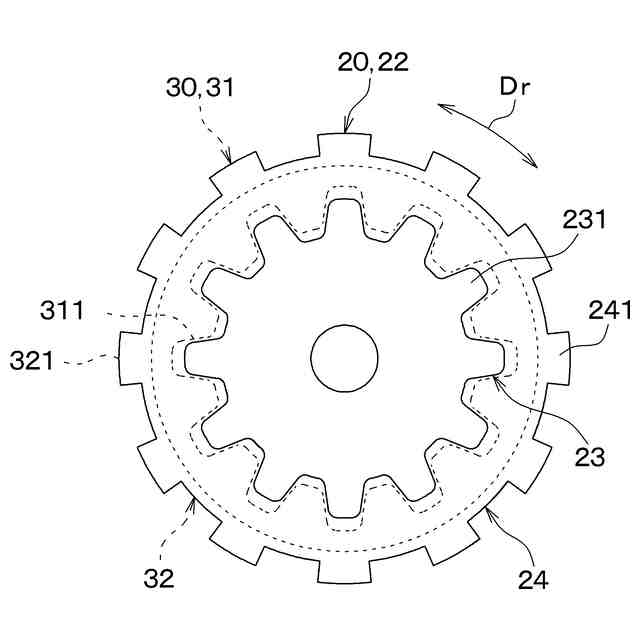
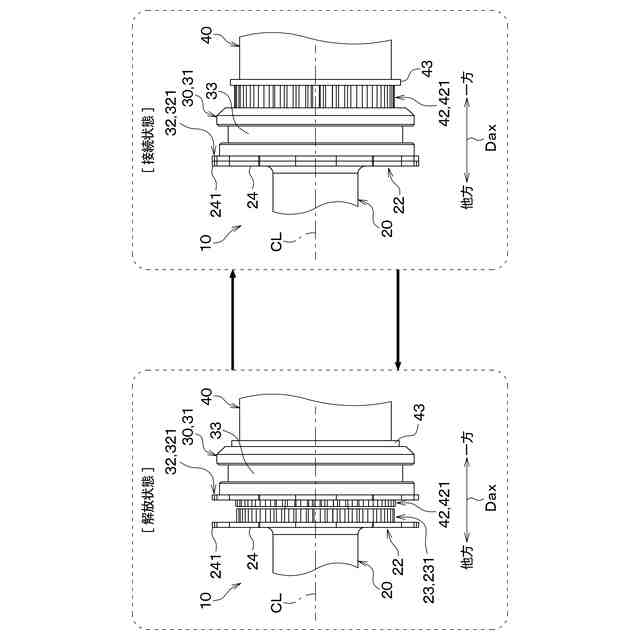
所定方向を軸方向としたとき、前記軸方向に延びる軸心を中心として回転可能に構成され、複数の第1ギア歯(231)を有する第1回転部材(20)と、前記軸心を中心として回転可能に構成され、前記複数の第1ギア歯と噛み合わせることが可能な複数の第2ギア歯(311)を有する第2回転部材(30、40)と、を備える動力伝達装置(1)に適用される位置検出装置であって、
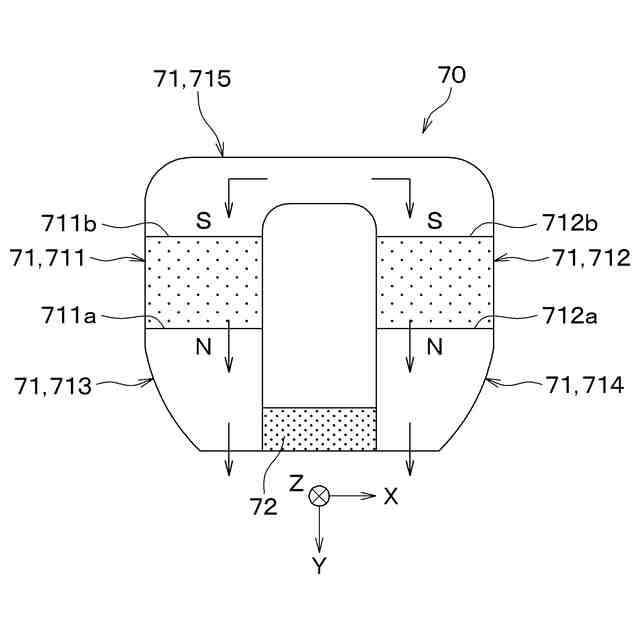
回転する前記第1ギア歯と回転する前記第2ギア歯との相対的な位置関係に応じた信号を、周波数成分を含む位置信号として出力する位置センサ(70、75、76)と、
前記第1回転部材の回転数を検出し、検出した前記第1回転部材の回転数に応じた第1回転信号を出力する第1回転センサ(81、83)と、
前記第2回転部材の回転数を検出し、検出した前記第2回転部材の回転数に応じた第2回転信号を出力する第2回転センサ(82、84)と、
前記位置センサが出力する前記位置信号から所定の周波数である上側周波数以上の周波数成分および前記上側周波数より低い周波数である下側周波数以下の周波数成分を除去したフィルタ信号を出力するフィルタ部(531)と、を備え、
前記フィルタ部は、前記第1回転センサが出力する前記第1回転信号に基づいて前記上側周波数を変化させるとともに、前記第2回転センサが出力する前記第2回転信号に基づいて前記下側周波数を変化させる位置検出装置。
続きを表示(約 1,400 文字)
【請求項2】
前記フィルタ部は、前記上側周波数以上の周波数成分および前記下側周波数以下の周波数成分をデジタル処理によって除去するデジタルバンドパスフィルタを有する請求項1に記載の位置検出装置。
【請求項3】
前記フィルタ部は、前記上側周波数以上の周波数成分および前記下側周波数以下の周波数成分をアナログ処理によって除去する複数のバンドパス回路(531a、531b、531c、531d)を有する請求項1に記載の位置検出装置。
【請求項4】
前記フィルタ部は、前記上側周波数以上の周波数成分をアナログ処理によって除去するローパス回路(531e、531f)および前記下側周波数以下の周波数成分をアナログ処理によって除去するハイパス回路(531g、531h)を有する請求項1に記載の位置検出装置。
【請求項5】
前記第1回転センサは、前記第1回転部材の回転数を直接検出し、
前記第2回転センサは、前記第2回転部材の回転数を直接検出する請求項1に記載の位置検出装置。
【請求項6】
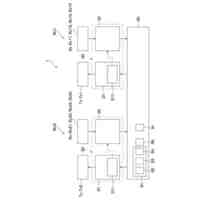
前記動力伝達装置は、前記第1回転部材の回転数を変換する第1変換部(3)と、前記第1変換部によって前記第1回転部材の回転数とは異なる回転数に変換された回転数で前記第1回転部材と一体に回転する第3回転部材(4)と、前記第2回転部材の回転数を変換する第2変換部(5)と、前記第2変換部によって前記第2回転部材の回転数とは異なる回転数に変換された回転数で前記第2回転部材と一体に回転する第4回転部材(6)と、を有し、
前記第1回転センサは、前記第3回転部材の回転数を検出することで前記第1回転部材の回転数を間接的に検出し、
前記第2回転センサは、前記第4回転部材の回転数を検出することで前記第2回転部材の回転数を間接的に検出する請求項1に記載の位置検出装置。
【請求項7】
前記動力伝達装置は、該動力伝達装置の作動を制御する制御装置(53)を有する車両に適用され、
前記フィルタ部は、前記制御装置によって構成されている請求項1に記載の位置検出装置。
【請求項8】
前記動力伝達装置は、該動力伝達装置の作動を制御する制御装置(53)を有する車両に適用され、
前記フィルタ部は、前記制御装置と別体に構成されており、前記フィルタ信号を前記制御装置に出力する請求項1に記載の位置検出装置。
【請求項9】
前記第1回転部材および前記第2回転部材は、前記第1ギア歯および前記第2ギア歯が噛み合って一体に回転可能であって、
前記フィルタ部が出力する前記フィルタ信号に基づいて前記第1ギア歯と前記第2ギア歯との相対位置を検出し、前記第1ギア歯および前記第2ギア歯が噛み合い可能となる係合タイミングを求める相対位置算出部(532)を備える請求項1に記載の位置検出装置。
【請求項10】
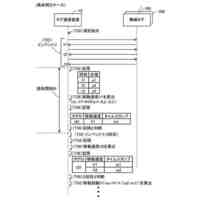
前記相対位置算出部は、前記フィルタ部が出力する前記フィルタ信号を複数のハイ信号および複数のロー信号に二値化したパルス信号にして出力する二値化処理部(5321)および前記二値化処理部が出力する前記パルス信号における前記複数のハイ信号それぞれの間隔に基づいて前記係合タイミングを求める係合タイミング検出部(5322)を有する請求項9に記載の位置検出装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、位置検出装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、ターボチャージャの吸気コンプレッサのハウジング内で回転するブレードを検出するブレード検出センサと、ブレード検出センサの出力を2値化して出力するセンサ回路と、を備える回転数検出装置が知られている(例えば、特許文献1参照)。
【0003】
この回転数検出装置において、センサ回路は、ブレード検出センサの出力信号のうち、路面に設置されたロードヒータから発生する低周波の磁気に起因する低周波ノイズを除去するハイパスフィルタを有する。また、センサ回路は、ブレード検出センサの出力信号のうち、ターボチャージャが備えるシャフトの軸ずれに起因する高周波ノイズを除去するローパスフィルタを有する。これにより、特許文献1に記載の回転数検出装置は、ブレード検出センサの出力信号に含まれる低周波ノイズおよび高周波ノイズをそれぞれ除去可能となっている。そして、ハイパスフィルタは、ターボチャージャの回転数によって周波数の値が変化する高周波ノイズの周波数に応じて、除去する高周波ノイズの周波数の値を上下に変更可能となっている。
【先行技術文献】
【特許文献】
【0004】
特開2017-072068号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、それぞれ独立して回転する2つの回転部材の相対位置を検出する位置検出装置において、2つの回転部材の回転数が互いに異なる場合、2つの回転部材それぞれの回転に起因した互いに周波数が異なる2つのノイズが発生することが有る。このような2つの回転部材それぞれの回転に起因したノイズは、2つの回転部材それぞれの回転数によって、それぞれの周波数の値が変化する。したがって、互いに周波数が異なる2つのノイズをそれぞれ除去する場合、それぞれのノイズの周波数に応じて、除去する周波数の値を変更することが求められる。
【0006】
しかしながら、特許文献1に記載の位置検出装置では、除去する低周波ノイズおよび高周波ノイズのうち、高周波ノイズ側の周波数の値を変更可能となっているが、低周波ノイズ側の周波数の値を変更することができない。このため、特許文献1に記載の構成を、2つの回転部材の相対位置を検出する位置検出装置に用いても、当該2つの回転部材の相対位置を精度良く検出することが難しい。このような課題は、発明者らの鋭意検討によって見出された。
【0007】
本開示は、回転する2つの回転部材の相対位置を精度良く検出可能な位置検出装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本開示の1つの観点によれば、
所定方向を軸方向としたとき、軸方向に延びる軸心を中心として回転可能に構成され、複数の第1ギア歯(231)を有する第1回転部材(20)と、軸心を中心として回転可能に構成され、複数の第1ギア歯と噛み合わせることが可能な複数の第2ギア歯(311)を有する第2回転部材(30、40)と、を備える動力伝達装置(1)に適用される位置検出装置であって、
回転する第1ギア歯と回転する第2ギア歯との相対的な位置関係に応じた信号を、周波数成分を含む位置信号として出力する位置センサ(70、75、76)と、
第1回転部材の回転数を検出し、検出した第1回転部材の回転数に応じた第1回転信号を出力する第1回転センサ(81、83)と、
第2回転部材の回転数を検出し、検出した第2回転部材の回転数に応じた第2回転信号を出力する第2回転センサ(82、84)と、
位置センサが出力する位置信号から所定の周波数である上側周波数以上の周波数成分および上側周波数より低い周波数である下側周波数以下の周波数成分を除去したフィルタ信号を出力するフィルタ部(531)と、を備え、
フィルタ部は、第1回転センサが出力する第1回転信号に基づいて上側周波数を変化させるとともに、第2回転センサが出力する第2回転信号に基づいて下側周波数を変化させる。
【0009】
これによれば、フィルタ部は、上側周波数を、第1回転部材の回転数に応じて周波数が変化する高周波ノイズの周波数に対応させることができる。また、フィルタ部は、下側周波数を、第2回転部材の回転数に応じて変化する低周波ノイズの周波数に対応させることができる。したがって、位置検出装置は、第1回転部材と第2回転部材との相対位置の検出精度を向上させることができる。
【0010】
なお、各構成要素等に付された括弧付きの参照符号は、その構成要素等と後述する実施形態に記載の具体的な構成要素等との対応関係の一例を示すものである。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソーエレクトロニクス
筐体
3日前
株式会社デンソー
診断装置
2日前
株式会社デンソー
演算装置
2日前
株式会社デンソー
レーダ装置
3日前
株式会社デンソー
レーダ装置
3日前
株式会社デンソー
半導体装置
2日前
株式会社デンソーウェーブ
タグ通信装置
2日前
株式会社デンソーウェーブ
光学情報読取装置
2日前
株式会社デンソー
酸性ガス回収システム
4日前
株式会社デンソー
生体信号検出システム
3日前
株式会社SOKEN
回転機
3日前
株式会社デンソーウェーブ
タグ通信装置及び特定の無線タグ
4日前
株式会社デンソー
通信システムおよび電子制御装置
2日前
株式会社デンソー
通信システムおよび電子制御装置
2日前
トヨタ自動車株式会社
判定装置
4日前
株式会社デンソー
通信システムおよび電子制御装置
2日前
株式会社デンソー
半導体装置、および、電力変換装置
2日前
株式会社デンソーテン
学習装置、学習方法及び学習プログラム
2日前
株式会社デンソーテン
運転支援装置、車載システム及び運転支援方法
2日前
株式会社デンソーテン
通信方法、通信装置、通信システム、及びプログラム
2日前
株式会社デンソー
車輪監視システム
9日前
株式会社SOKEN
DCDCコンバータの制御装置及びプログラム
2日前
株式会社デンソー
走行制御装置、走行制御方法、走行制御プログラム、及び車両の製造方法
3日前
株式会社デンソー
車両用制御装置及び車両用制御方法
2日前
株式会社豊田中央研究所
電力変換装置
2日前
京都メディアライン合同会社
掲載内容関連情報提供システム及び方法
4日前
個人
粒子分析装置
2日前
個人
アクセサリー型テスター
3日前
エイブリック株式会社
電流検出回路
16日前
栄進化学株式会社
浸透探傷用濃縮液
9日前
株式会社テイエルブイ
振動検出装置
2日前
株式会社ミツトヨ
画像測定機
4日前
東レ株式会社
シート状物の検査方法
17日前
株式会社チノー
放射光測温装置
16日前
ダイハツ工業株式会社
試料セル
2日前
大和製衡株式会社
計量装置
9日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ