TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025067926
公報種別
公開特許公報(A)
公開日
2025-04-24
出願番号
2025016085,2022079012
出願日
2025-02-03,2022-05-12
発明の名称
車両用制御装置及び車両用制御方法
出願人
株式会社デンソー
代理人
個人
,
個人
主分類
B60W
30/10 20060101AFI20250417BHJP(車両一般)
要約
【課題】周辺監視義務のない自動運転中における運転者の利便性の低下を防ぐことを可能にする。
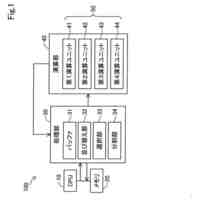
【解決手段】監視義務なし自動運転を実施する車両で用いることが可能であって、自車の走行環境を特定する走行環境認識部110と、監視義務なし自動運転中に、走行環境認識部110で特定した走行環境をもとに、自車の走行車線の隣接車線を走行する隣接車両と自車とが並走状態とならないように自車の走行制御を行う並走抑制制御を実施する並走抑制制御部155とを備える。
【選択図】図2
特許請求の範囲
【請求項1】
周辺監視義務のない自動運転である監視義務なし自動運転を実施する車両で用いることが可能な車両用制御装置であって、
前記車両の走行環境を特定する走行環境特定部(110)と、
前記監視義務なし自動運転中に、前記走行環境特定部で特定した前記走行環境をもとに、前記車両の走行車線の隣接車線を走行する隣接車両と前記車両とが並走状態とならないように前記車両の走行制御を行う並走抑制制御を実施する並走抑制制御部(155,155a,155b,155d,155e,155f)とを備え、
前記監視義務なし自動運転と周辺監視義務のある自動運転である監視義務あり自動運転との切り替えを実施する車両で用いることが可能であって、
前記並走抑制制御部は、前記監視義務あり自動運転中には、前記並走抑制制御を実施しない車両用制御装置。
続きを表示(約 3,200 文字)
【請求項2】
周辺監視義務のない自動運転である監視義務なし自動運転を実施する車両で用いることが可能な車両用制御装置であって、
前記車両の走行環境を特定する走行環境特定部(110)と、
前記監視義務なし自動運転中に、前記走行環境特定部で特定した前記走行環境をもとに、前記車両の走行車線の隣接車線を走行する隣接車両と前記車両とが並走状態とならないように前記車両の走行制御を行う並走抑制制御を実施する並走抑制制御部(155,155a,155b,155d,155e,155f)とを備え、
前記並走抑制制御部(155a)は、前記車両の側方のうち、前記車両の運転席から見て、前記車両のセンターコンソール部分に設けられる表示器(19)が位置する側である確認方向側の隣接車線に、他車両が存在しない場合には、前記並走抑制制御を実施しない一方、前記確認方向側の隣接車線に、他車両が存在する場合には、前記並走抑制制御を実施する車両用制御装置。
【請求項3】
周辺監視義務のない自動運転である監視義務なし自動運転を実施する車両で用いることが可能な車両用制御装置であって、
前記車両の走行環境を特定する走行環境特定部(110)と、
前記監視義務なし自動運転中に、前記走行環境特定部で特定した前記走行環境をもとに、前記車両の走行車線の隣接車線を走行する隣接車両と前記車両とが並走状態とならないように前記車両の走行制御を行う並走抑制制御を実施する並走抑制制御部(155,155a,155b,155d,155e,155f)とを備え、
前記並走抑制制御部(155b)は、カーブの度合が規定値未満の直線路において前記並走抑制制御を可能にするものであり、前記並走抑制制御を実施する場合に、前記走行環境特定部で特定した前記走行環境をもとに、カーブの度合が規定値以上のカーブ路に前記車両が進入するまでにその並走抑制制御を完了させることができる場合には、前記車両が前記カーブ路に進入するまでにその並走抑制制御を完了させるようにする一方、前記車両が前記カーブ路に進入するまでにその並走抑制制御を完了させることができない場合には、前記車両が前記カーブ路に進入するまでにその並走抑制制御を可能な分だけ進めた上で並走抑制制御を一時中止させるようにする車両用制御装置。
【請求項4】
周辺監視義務のない自動運転である監視義務なし自動運転を実施する車両で用いることが可能な車両用制御装置であって、
前記車両の走行環境を特定する走行環境特定部(110)と、
前記監視義務なし自動運転中に、前記走行環境特定部で特定した前記走行環境をもとに、前記車両の走行車線の隣接車線を走行する隣接車両と前記車両とが並走状態とならないように前記車両の走行制御を行う並走抑制制御を実施する並走抑制制御部(155,155a,155b,155d,155e,155f)とを備え、
前記並走抑制制御部は、前記並走抑制制御として、少なくとも前記車両とその前記車両の前方車両との車間距離を狭くする制御と、前記車両と前記前方車両との車間距離を広くする制御と、前記車両を加速させる制御と、前記車両を減速させる制御とのうちのいずれかである縦方向制御を用いるものであり、
前記監視義務なし自動運転として、エリアを限定して前記監視義務なし自動運転が許可されるエリア限定自動運転と、渋滞時に限定して前記監視義務なし自動運転が許可される渋滞限定自動運転との切り替えを実施する車両で用いることが可能であって、
前記並走抑制制御部は、前記縦方向制御として、前記車両と前記前方車両との車間距離を狭くする制御と、前記車両を加速させる制御とのうちの少なくともいずれかである前方向制御と、前記車両と前記前方車両との車間距離を広くする制御と、前記車両を減速させる制御とのうちの少なくともいずれかである後方向制御とを用いるものであり、
前記並走抑制制御部は、前記並走抑制制御として、前記エリア限定自動運転中には、前記後方向制御を優先して用いる一方、前記渋滞限定自動運転中には、前記前方向制御を優先して用いる車両用制御装置。
【請求項5】
請求項1~4のいずれか1項に記載の車両用制御装置であって、
前記並走抑制制御部は、前記並走抑制制御として、少なくとも前記車両とその前記車両の前方車両との車間距離を狭くする制御と、前記車両と前記前方車両との車間距離を広くする制御と、前記車両を加速させる制御と、前記車両を減速させる制御とのうちのいずれかである縦方向制御を用いるものであり、
前記並走抑制制御部は、前記並走抑制制御として、前記車両を減速させる制御と前記車両を減速させる制御以外とを用いるものであり、
前記並走抑制制御部は、前記走行環境特定部で特定した前記走行環境をもとに、前記隣接車両が追越車線に位置する場合には、前記並走抑制制御として、前記車両を減速させる制御以外よりも前記車両を減速させる制御を優先して用いる車両用制御装置。
【請求項6】
請求項4に記載の車両用制御装置であって、
前記車両の運転者から入力装置(20)を介して設定を受け付けた設定値に応じた、前記設定値ごとに一定の許容幅を持つ目標車間距離となるように前方車両への追従走行制御を行う追従走行制御部(151)と、
前記車両の運転者から前記入力装置を介して設定を受け付けた前記設定値を表示器(19)に表示させる表示指示部(131)とを備え、
前記並走抑制制御部は、前記並走抑制制御としての前記縦方向制御を、前記許容幅の範囲内で実施し、
前記表示指示部は、前記並走抑制制御中であっても、前記運転者から前記入力装置を介して設定を受け付けた前記設定値を表示させる車両用制御装置。
【請求項7】
請求項4に記載の車両用制御装置であって、
目標車間距離となるように前方車両への追従走行制御を行う追従走行制御部(151c)と、
前記車両の車室内に向けて情報提示装置(21)に情報提示を行わせる提示指示部(131c)とを備え、
前記提示指示部は、前記並走抑制制御によって前記目標車間距離を逸脱する場合には、前記目標車間距離が一時的に変更になったことを示す情報提示と、前記並走抑制制御の実施に関する情報提示とを行わせる車両用制御装置。
【請求項8】
請求項4に記載の車両用制御装置であって、
前記並走抑制制御部(155d)は、前記走行環境特定部で特定した前記走行環境をもとに、追越し車線側の前記隣接車両と並走状態となる場合には、前記並走抑制制御を実施しない一方、追越し車線でない車線側の前記隣接車両と並走状態となる場合には、前記並走抑制制御を実施する車両用制御装置。
【請求項9】
請求項4に記載の車両用制御装置であって、
前記並走抑制制御部(155e)は、前記走行環境特定部で特定した前記走行環境をもとに、前記隣接車両と並走状態となりそうになった場合に、その隣接車両を追い越さない位置関係で前記車両の走行を継続するように前記並走抑制制御を実施する車両用制御装置。
【請求項10】
請求項4に記載の車両用制御装置であって、
前記並走抑制制御部(155f)は、前記走行環境特定部で特定した前記走行環境をもとに、前記縦方向制御を用いた前記並走抑制制御の実施が規定時間以上継続する場合であって、且つ、車線変更が可能な場合に、前記車線変更による前記並走抑制制御を実施する車両用制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両用制御装置及び車両用制御方法に関するものである。
続きを表示(約 6,300 文字)
【背景技術】
【0002】
特許文献1には、運転者に周辺監視義務が要求されない高レベルの自動運転レベルにおいて、車両に対して並走する他車両との距離を広げるように車両の走行位置を車幅方向にオフセットさせるオフセット制御を行うことが記載されている。また、周辺監視義務が要求されない自動運転レベルにおいて、運転以外のセカンドタスクの実施が運転者に許可される技術が知られている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2019/043847号
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示の技術では、自車と並走車との車幅方向の距離を広げることは可能になる。しかしながら、並走車との並走状態が継続された場合、並走車の乗員から自車での運転者のセカンドタスクの状態が容易に見られることになってしまう。よって、運転者にとっての利便性が低下してしまう問題があった。
【0005】
この開示の1つの目的は、周辺監視義務のない自動運転中における運転者の利便性の低下を防ぐことを可能にする車両用制御装置及び車両用制御方法を提供することにある。
【課題を解決するための手段】
【0006】
上記目的は独立請求項に記載の特徴の組み合わせにより達成され、また、下位請求項は、開示の更なる有利な具体例を規定する。特許請求の範囲に記載した括弧内の符号は、1つの態様として後述する実施形態に記載の具体的手段との対応関係を示すものであって、本開示の技術的範囲を限定するものではない。
【0007】
上記目的を達成するために、本開示の第1の車両用制御装置は、周辺監視義務のない自動運転である監視義務なし自動運転を実施する車両で用いることが可能な車両用制御装置であって、車両の走行環境を特定する走行環境特定部(110)と、監視義務なし自動運転中に、走行環境特定部で特定した走行環境をもとに、車両の走行車線の隣接車線を走行する隣接車両と車両とが並走状態とならないように車両の走行制御を行う並走抑制制御を実施する並走抑制制御部(155,155a,155b,155d,155e,155f)とを備え、監視義務なし自動運転と周辺監視義務のある自動運転である監視義務あり自動運転との切り替えを実施する車両で用いることが可能であって、並走抑制制御部は、監視義務あり自動運転中には、並走抑制制御を実施しない。
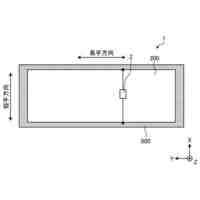
上記目的を達成するために、本開示の第2の車両用制御装置は、周辺監視義務のない自動運転である監視義務なし自動運転を実施する車両で用いることが可能な車両用制御装置であって、車両の走行環境を特定する走行環境特定部(110)と、監視義務なし自動運転中に、走行環境特定部で特定した走行環境をもとに、車両の走行車線の隣接車線を走行する隣接車両と車両とが並走状態とならないように車両の走行制御を行う並走抑制制御を実施する並走抑制制御部(155,155a,155b,155d,155e,155f)とを備え、並走抑制制御部(155a)は、車両の側方のうち、車両の運転席から見て、車両のセンターコンソール部分に設けられる表示器(19)が位置する側である確認方向側の隣接車線に、他車両が存在しない場合には、並走抑制制御を実施しない一方、確認方向側の隣接車線に、他車両が存在する場合には、並走抑制制御を実施する。
上記目的を達成するために、本開示の第3の車両用制御装置は、周辺監視義務のない自動運転である監視義務なし自動運転を実施する車両で用いることが可能な車両用制御装置であって、車両の走行環境を特定する走行環境特定部(110)と、監視義務なし自動運転中に、走行環境特定部で特定した走行環境をもとに、車両の走行車線の隣接車線を走行する隣接車両と車両とが並走状態とならないように車両の走行制御を行う並走抑制制御を実施する並走抑制制御部(155,155a,155b,155d,155e,155f)とを備え、並走抑制制御部(155b)は、カーブの度合が規定値未満の直線路において並走抑制制御を可能にするものであり、並走抑制制御を実施する場合に、走行環境特定部で特定した走行環境をもとに、カーブの度合が規定値以上のカーブ路に車両が進入するまでにその並走抑制制御を完了させることができる場合には、車両がカーブ路に進入するまでにその並走抑制制御を完了させるようにする一方、車両がカーブ路に進入するまでにその並走抑制制御を完了させることができない場合には、車両がカーブ路に進入するまでにその並走抑制制御を可能な分だけ進めた上で並走抑制制御を一時中止させるようにする。
上記目的を達成するために、本開示の第4の車両用制御装置は、周辺監視義務のない自動運転である監視義務なし自動運転を実施する車両で用いることが可能な車両用制御装置であって、車両の走行環境を特定する走行環境特定部(110)と、監視義務なし自動運転中に、走行環境特定部で特定した走行環境をもとに、車両の走行車線の隣接車線を走行する隣接車両と車両とが並走状態とならないように車両の走行制御を行う並走抑制制御を実施する並走抑制制御部(155,155a,155b,155d,155e,155f)とを備え、並走抑制制御部は、並走抑制制御として、少なくとも車両とその車両の前方車両との車間距離を狭くする制御と、車両と前方車両との車間距離を広くする制御と、車両を加速させる制御と、車両を減速させる制御とのうちのいずれかである縦方向制御を用いるものであり、監視義務なし自動運転として、エリアを限定して監視義務なし自動運転が許可されるエリア限定自動運転と、渋滞時に限定して監視義務なし自動運転が許可される渋滞限定自動運転との切り替えを実施する車両で用いることが可能であって、並走抑制制御部は、縦方向制御として、車両と前方車両との車間距離を狭くする制御と、車両を加速させる制御とのうちの少なくともいずれかである前方向制御と、車両と前方車両との車間距離を広くする制御と、車両を減速させる制御とのうちの少なくともいずれかである後方向制御とを用いるものであり、並走抑制制御部は、並走抑制制御として、エリア限定自動運転中には、後方向制御を優先して用いる一方、渋滞限定自動運転中には、前方向制御を優先して用いる。
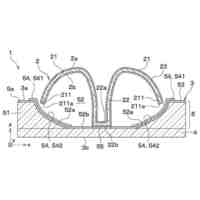
上記目的を達成するために、本開示の第5の車両用制御装置は、周辺監視義務のない自動運転である監視義務なし自動運転を実施する車両で用いることが可能な車両用制御装置であって、車両の走行環境を特定する走行環境特定部(110)と、監視義務なし自動運転中に、走行環境特定部で特定した走行環境をもとに、車両の走行車線の隣接車線を走行する隣接車両と車両とが並走状態とならないように車両の走行制御を行う並走抑制制御を実施する並走抑制制御部(155,155a,155b,155d,155e,155f)とを備え、並走状態の隣接車両の乗員から車室内を見えにくくするブラインド機構(17)も有する車両で用いることが可能であって、並走抑制制御では隣接車両と車両とが並走状態とならないようにすることが困難な状況である並走抑制困難状況を特定する困難状況特定部(160)と、監視義務なし自動運転中に、困難状況特定部で並走抑制困難状況が特定される場合には、ブラインド機構を作動させるブラインド制御を実施するブラインド制御部(170)とを備える。
【0008】
上記目的を達成するために、本開示の第1の車両用制御方法は、周辺監視義務のない自動運転である監視義務なし自動運転を実施する車両で用いることが可能な車両用制御方法であって、少なくとも1つのプロセッサにより実行される、車両の走行環境を特定する走行環境特定工程と、監視義務なし自動運転中に、走行環境特定工程で特定した走行環境をもとに、車両の走行車線の隣接車線を走行する隣接車両と車両とが並走状態とならないように車両の走行制御を行う並走抑制制御を実施する並走抑制制御工程とを含み、監視義務なし自動運転と周辺監視義務のある自動運転である監視義務あり自動運転との切り替えを実施する車両で用いることが可能であって、並走抑制制御工程では、監視義務あり自動運転中には、並走抑制制御を実施しない。
上記目的を達成するために、本開示の第2の車両用制御方法は、周辺監視義務のない自動運転である監視義務なし自動運転を実施する車両で用いることが可能な車両用制御方法であって、少なくとも1つのプロセッサにより実行される、車両の走行環境を特定する走行環境特定工程と、監視義務なし自動運転中に、走行環境特定工程で特定した走行環境をもとに、車両の走行車線の隣接車線を走行する隣接車両と車両とが並走状態とならないように車両の走行制御を行う並走抑制制御を実施する並走抑制制御工程とを含み、並走抑制制御工程では、車両の側方のうち、車両の運転席から見て、車両のセンターコンソール部分に設けられる表示器(19)が位置する側である確認方向側の隣接車線に、他車両が存在しない場合には、並走抑制制御を実施しない一方、確認方向側の隣接車線に、他車両が存在する場合には、並走抑制制御を実施する。
上記目的を達成するために、本開示の第3の車両用制御方法は、周辺監視義務のない自動運転である監視義務なし自動運転を実施する車両で用いることが可能な車両用制御方法であって、少なくとも1つのプロセッサにより実行される、車両の走行環境を特定する走行環境特定工程と、監視義務なし自動運転中に、走行環境特定工程で特定した走行環境をもとに、車両の走行車線の隣接車線を走行する隣接車両と車両とが並走状態とならないように車両の走行制御を行う並走抑制制御を実施する並走抑制制御工程とを含み、並走抑制制御工程では、カーブの度合が規定値未満の直線路において並走抑制制御を可能にするものであり、並走抑制制御を実施する場合に、走行環境特定工程で特定した走行環境をもとに、カーブの度合が規定値以上のカーブ路に車両が進入するまでにその並走抑制制御を完了させることができる場合には、車両がカーブ路に進入するまでにその並走抑制制御を完了させるようにする一方、車両がカーブ路に進入するまでにその並走抑制制御を完了させることができない場合には、車両がカーブ路に進入するまでにその並走抑制制御を可能な分だけ進めた上で並走抑制制御を一時中止させるようにする。
上記目的を達成するために、本開示の第4の車両用制御方法は、周辺監視義務のない自動運転である監視義務なし自動運転を実施する車両で用いることが可能な車両用制御方法であって、少なくとも1つのプロセッサにより実行される、車両の走行環境を特定する走行環境特定工程と、監視義務なし自動運転中に、走行環境特定工程で特定した走行環境をもとに、車両の走行車線の隣接車線を走行する隣接車両と車両とが並走状態とならないように車両の走行制御を行う並走抑制制御を実施する並走抑制制御工程とを含み、並走抑制制御工程では、並走抑制制御として、少なくとも車両とその車両の前方車両との車間距離を狭くする制御と、車両と前方車両との車間距離を広くする制御と、車両を加速させる制御と、車両を減速させる制御とのうちのいずれかである縦方向制御を用いるものであり、監視義務なし自動運転として、エリアを限定して監視義務なし自動運転が許可されるエリア限定自動運転と、渋滞時に限定して監視義務なし自動運転が許可される渋滞限定自動運転との切り替えを実施する車両で用いることが可能であって、並走抑制制御工程では、縦方向制御として、車両と前方車両との車間距離を狭くする制御と、車両を加速させる制御とのうちの少なくともいずれかである前方向制御と、車両と前方車両との車間距離を広くする制御と、車両を減速させる制御とのうちの少なくともいずれかである後方向制御とを用いるものであり、並走抑制制御工程では、並走抑制制御として、エリア限定自動運転中には、後方向制御を優先して用いる一方、渋滞限定自動運転中には、前方向制御を優先して用いる。
上記目的を達成するために、本開示の第5の車両用制御方法は、周辺監視義務のない自動運転である監視義務なし自動運転を実施する車両で用いることが可能な車両用制御方法であって、少なくとも1つのプロセッサにより実行される、車両の走行環境を特定する走行環境特定工程と、監視義務なし自動運転中に、走行環境特定工程で特定した走行環境をもとに、車両の走行車線の隣接車線を走行する隣接車両と車両とが並走状態とならないように車両の走行制御を行う並走抑制制御を実施する並走抑制制御工程とを含み、並走状態の隣接車両の乗員から車室内を見えにくくするブラインド機構(17)も有する車両で用いることが可能であって、並走抑制制御では隣接車両と車両とが並走状態とならないようにすることが困難な状況である並走抑制困難状況を特定する困難状況特定工程と、監視義務なし自動運転中に、困難状況特定工程で並走抑制困難状況が特定される場合には、ブラインド機構を作動させるブラインド制御を実施するブラインド制御工程とを含む。
【0009】
以上の構成によれば、監視義務なし自動運転中に、自車の走行車線の隣接車線を走行する隣接車両と自車とが並走状態とならないように自車の走行制御を行う並走抑制制御を実施することが可能になる。よって、監視義務なし自動運転中に、隣接車両と自車とが並走状態となるのを抑制することが可能になる。従って、隣接車両の乗員から自車での運転者のセカンドタスクの状態を見られにくくすることが可能になる。その結果、周辺監視義務のない自動運転中における運転者の利便性の低下を防ぐことが可能になる。
【図面の簡単な説明】
【0010】
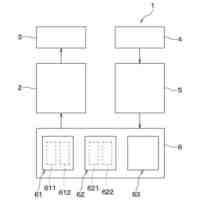
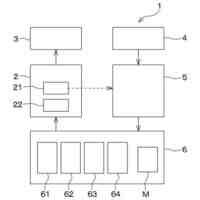
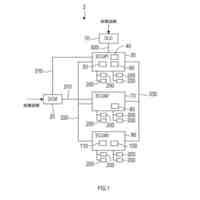
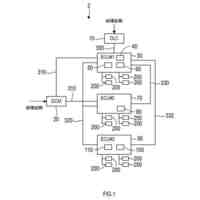
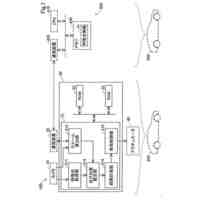
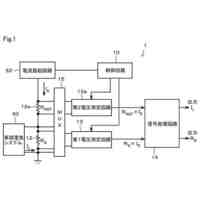
車両用システム1の概略的な構成の一例を示す図である。
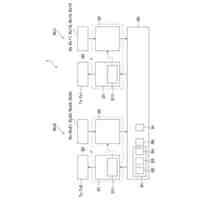
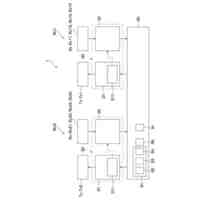
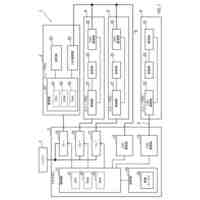
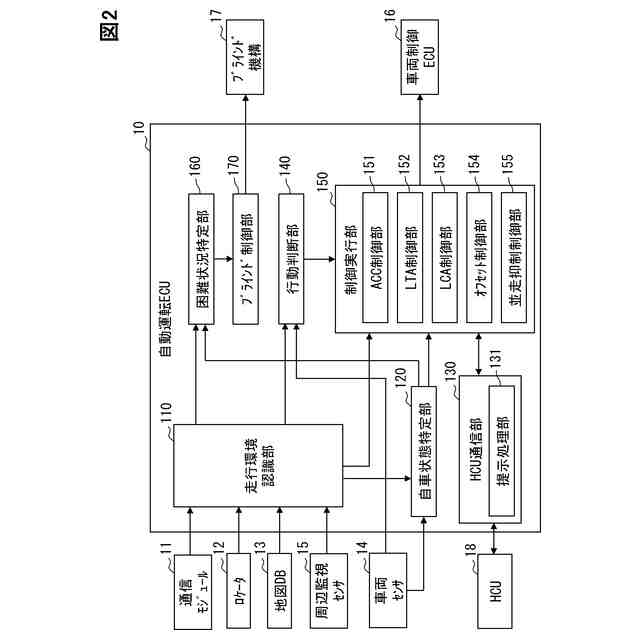
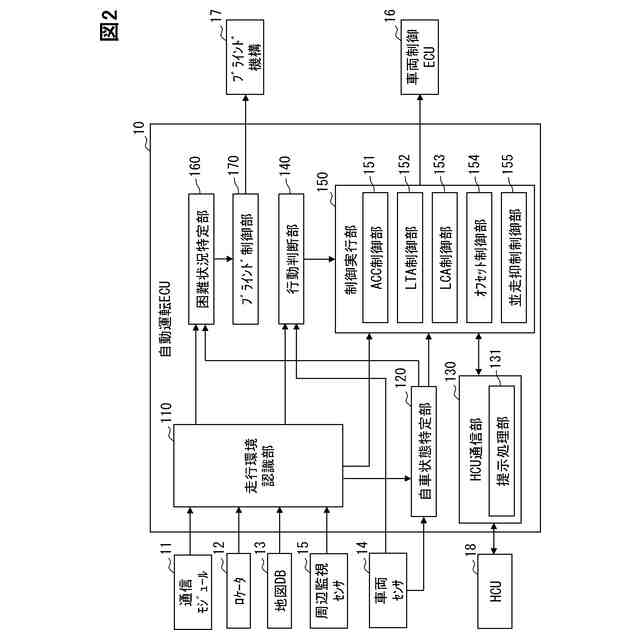
自動運転ECU10の概略的な構成に一例を示す図である。
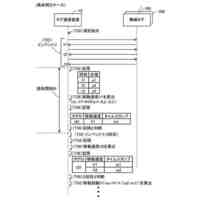
車間距離設定値の表示の一例について説明するための図である。
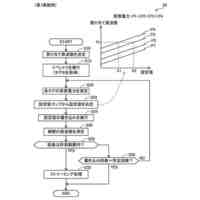
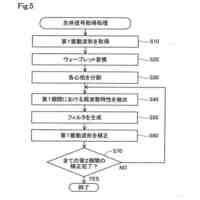
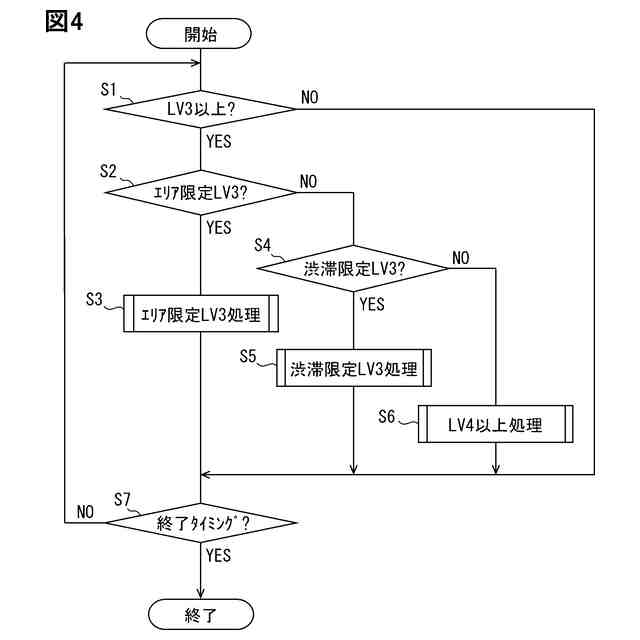
自動運転ECU10での並走抑制関連処理の流れの一例を示すフローチャートである。
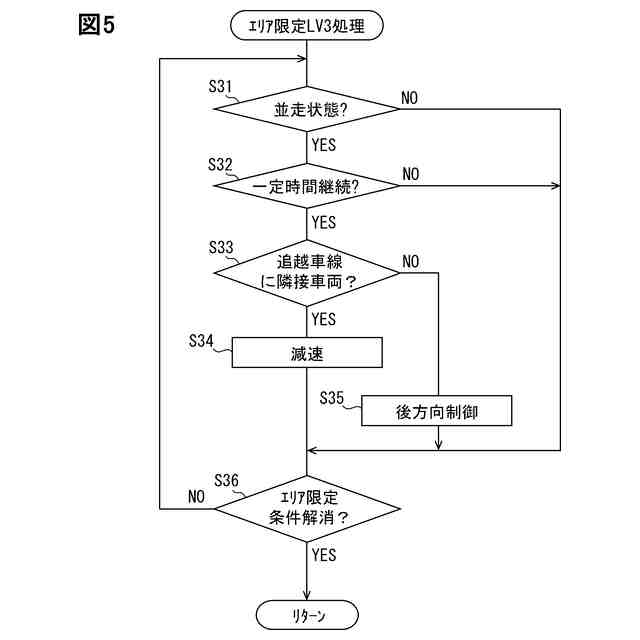
自動運転ECU10でのエリア限定LV3処理の流れの一例を示す図である。
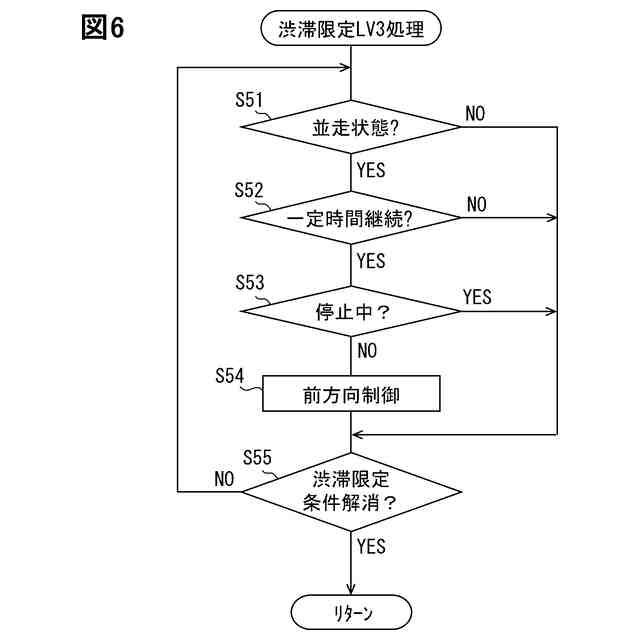
自動運転ECU10での渋滞限定LV3処理の流れの一例を示すフローチャートである。
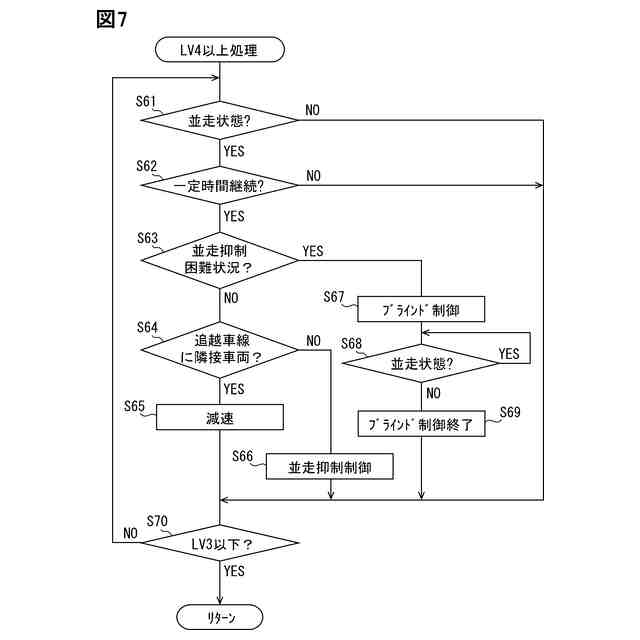
自動運転ECU10でのLV4以上処理の流れの一例を示すフローチャートである。
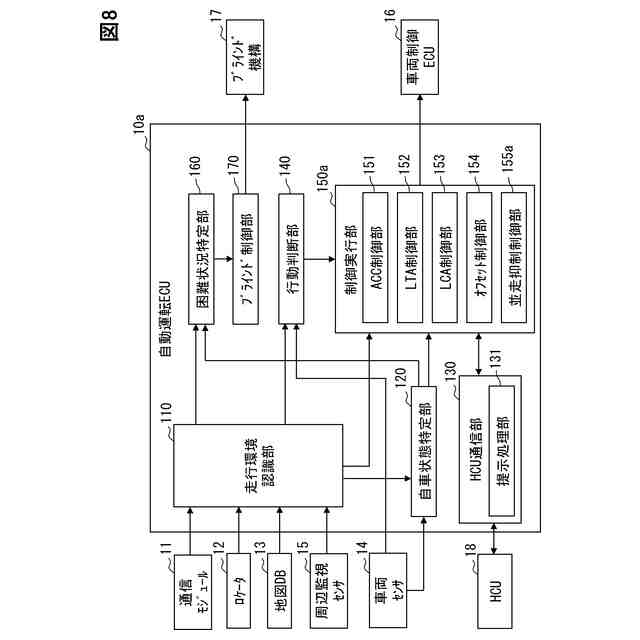
自動運転ECU10aの概略的な構成に一例を示す図である。
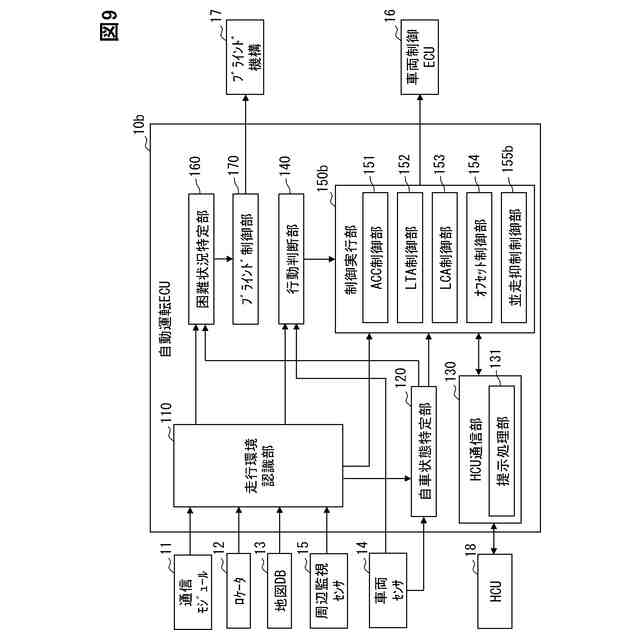
自動運転ECU10bの概略的な構成に一例を示す図である。
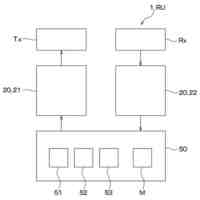
車両用システム1cの概略的な構成の一例を示す図である。
自動運転ECU10cの概略的な構成に一例を示す図である。
並走抑制画像の表示の一例について説明するための図である。
自動運転ECU10dの概略的な構成の一例を示す図である。
自動運転ECU10eの概略的な構成の一例を示す図である。
自動運転ECU10fの概略的な構成の一例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソーエレクトロニクス
筐体
4日前
株式会社デンソー
モータ
17日前
株式会社デンソー
診断装置
3日前
株式会社デンソー
試験装置
13日前
株式会社デンソー
回転電機
18日前
株式会社デンソー
演算装置
3日前
株式会社デンソー
電池装置
11日前
株式会社デンソー
レーダ装置
17日前
株式会社デンソー
レーダ装置
11日前
株式会社デンソー
レーダ装置
11日前
株式会社デンソー
半導体装置
3日前
株式会社デンソー
レーダ装置
10日前
株式会社デンソー
慣性センサ
10日前
株式会社デンソー
レーダ装置
4日前
株式会社デンソー
レーダ装置
4日前
株式会社デンソー
半導体装置
13日前
株式会社デンソー
通信システム
18日前
株式会社デンソー
通信システム
19日前
株式会社デンソーウェーブ
タグ通信装置
18日前
株式会社デンソーウェーブ
タグ通信装置
3日前
株式会社デンソー
通信システム
18日前
株式会社デンソーテン
スロットアンテナ
12日前
株式会社デンソー
自己位置推定装置
20日前
株式会社デンソーウェーブ
ロボットシステム
19日前
株式会社デンソー
回転角度検出装置
11日前
株式会社デンソー
路面摩擦推定装置
18日前
株式会社デンソーウェーブ
光学情報読取装置
3日前
株式会社デンソーウェーブ
歪ゲージの取付方法
18日前
株式会社デンソー
二酸化炭素回収装置
12日前
株式会社デンソーウェーブ
移動体追跡システム
20日前
株式会社デンソーウェーブ
データ配信システム
17日前
株式会社デンソー
生体信号検出システム
4日前
株式会社デンソー
シャント式電流センサ
19日前
株式会社デンソーウェーブ
ロボット制御システム
16日前
株式会社デンソー
酸性ガス回収システム
5日前
株式会社デンソートリム
エンジン電子制御装置
18日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ