TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024179203
公報種別
公開特許公報(A)
公開日
2024-12-26
出願番号
2023097863
出願日
2023-06-14
発明の名称
ピッキングロボットシステムおよびピッキングロボット制御方法
出願人
株式会社日立製作所
代理人
弁理士法人信友国際特許事務所
主分類
B65G
57/03 20060101AFI20241219BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】ピッキングロボットシステムにおいて、ワークの姿勢が計画した段階から変わる場合においても制約を満たした積み付けを可能にする。
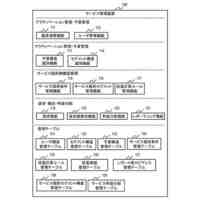
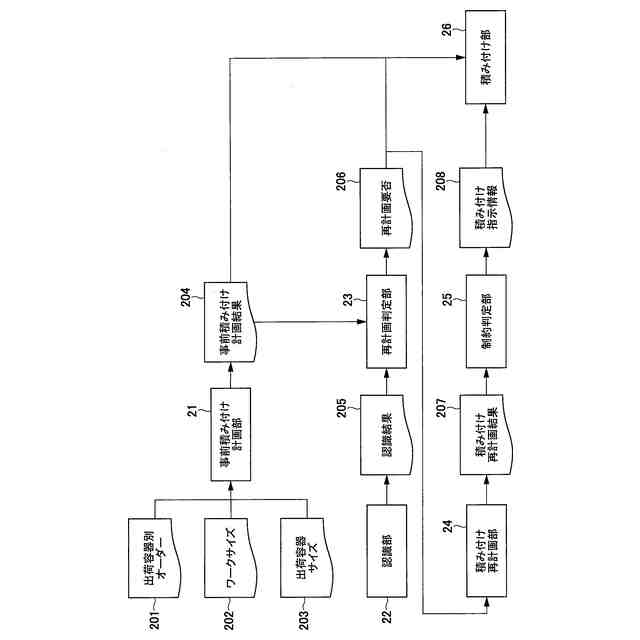
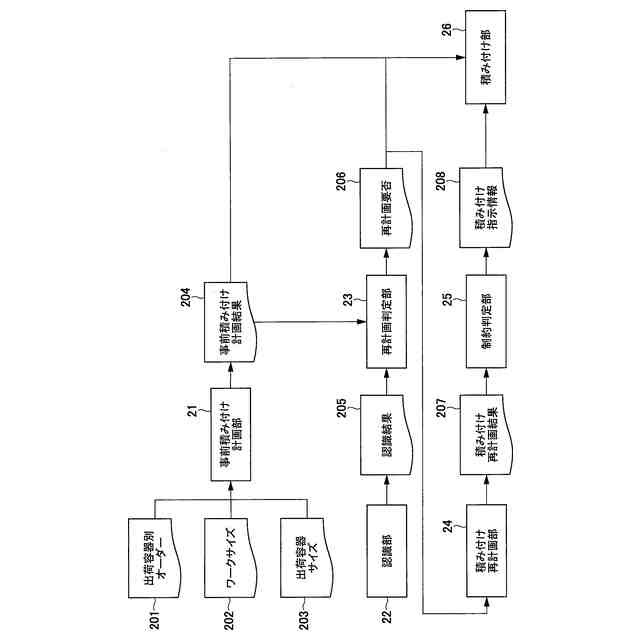
【解決手段】出荷容器にどのワークをいくつ積み付けるかの出荷容器別オーダーと、ワークのサイズ情報と、出荷容器のサイズ情報とから、それぞれのワークをプレースする位置姿勢を事前に計画する事前積み付け計画部21と、ワークの認識を行う認識部22と、積み付けの再計画が必要かを判定する再計画判定部23と、再計画が必要な場合に、出荷容器別オーダーの残りのワークまで含めてプレースする位置姿勢を計画する積み付け再計画部24と、積み付け再計画の結果が制約を満たしているかを判定する制約判定部25と、前積み付け計画結果もしくは積み付け再計画結果に従ってワークを積み付ける積み付け部36と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
ワークをピック元容器からピックし、出荷容器にプレースするピッキングロボットシステムにおいて、
出荷容器にどのワークをいくつ積み付けるかの出荷容器別オーダーと、ワークのサイズ情報と、出荷容器のサイズ情報とから、それぞれのワークをプレースする位置姿勢を事前に計画する事前積み付け計画部と、
ワークの認識を行う認識部と、
ワークの積み付けの再計画が必要かを判定する再計画判定部と、
再計画が必要と判定された場合に、前記出荷容器別オーダーの残りのワークまで含めてプレースする位置姿勢を計画する積み付け再計画部と、
前記積み付け再計画部による積み付け再計画の結果が制約を満たしているかを判定する制約判定部と、
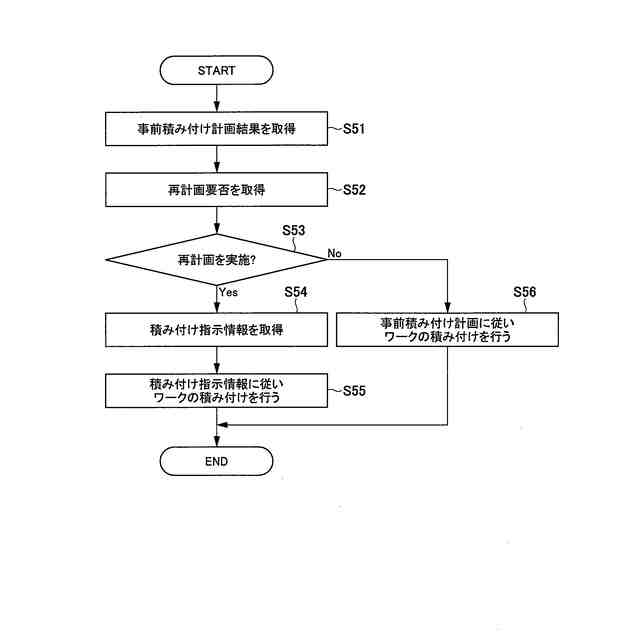
事前積み付け計画結果もしくは積み付け再計画結果に従ってワークを積み付ける積み付け部と、を備える
ピッキングロボットシステム。
続きを表示(約 1,800 文字)
【請求項2】
前記再計画判定部は、
ピック姿勢と事前に計画したプレース姿勢が同じかどうかから判定すること、
認識したワークのサイズと計画した際のワークのサイズが同じかどうかから判定すること、
ワークの重量を初めて計測した、もしくは計画した際のワークの重量と同じかどうかから判定すること、
プレース先の積み付け状況が計画した積み付けと同じかどうかから判定すること、
の少なくとも1つ以上から判定される
請求項1に記載のピッキングロボットシステム。
【請求項3】
前記制約は、
ワークが決められた領域内に収まるかの寸法制約、
目標の位置姿勢に積み付けるまでの軌道を含めて計画することで、ロボットや把持するワークがすでに積み付けたワークや容器の壁と衝突しないようにするロボット制約、
各ワークに重ねて積み付けるワークの総重量を制限する許容重量制約、
強度の高いワークを下段に積み付ける強度制約、
オーダーの中で重いワークを下段に積み付ける重量制約、
後段で積み付ける領域を確保する積み付け禁止領域制約、
同じワークを隣接して積み付ける品出し制約、
物品ごとに積み付ける姿勢を制限する姿勢制約、
出荷容器の移動に対して倒れにくい姿勢で積み付ける移動方向に対する姿勢制約、
の少なくとも1つ以上から判定される
請求項1に記載のピッキングロボットシステム。
【請求項4】
前記認識部は、ピック元容器の把持可能なすべてのワークの姿勢を認識し、
前記再計画判定部は、期待する姿勢でピックできるワークが必要な個数あるかによって判定する
請求項1に記載のピッキングロボットシステム。
【請求項5】
前記積み付け再計画部は、期待する姿勢でピックできるワークと期待する姿勢でピック出来ないワークとを、持ち替えが最小となるように個数と順序を含めて再計画する
請求項4に記載のピッキングロボットシステム。
【請求項6】
出荷容器の搬送を行う倉庫制御システムの出荷容器別オーダーが実行可能かを当該ピッキングロボットシステムへの問い合わせを受信したとき、出荷容器別オーダーと、ワークのサイズ情報と、出荷容器のサイズ情報から、それぞれのワークをプレースする位置姿勢を事前に計画する事前積み付け計画部と、
積み付け再計画の結果が制約を満たしているかを判定する制約判定部と、
出荷容器別オーダーが積み付け可能かを前記倉庫制御システムに回答する
請求項1に記載のピッキングロボットシステム。
【請求項7】
前記倉庫制御システムは、積み付け可能と回答された場合は、出荷容器別オーダーに従って、計画した通りにピック元容器を搬出し、積み付け不可能と回答された場合は、出荷別オーダーを更新する
請求項6に記載のピッキングロボットシステム。
【請求項8】
前記倉庫制御システムは、積み付け不可能と回答された場合に、出荷容器別オーダーを別のピッキングロボットシステムもしくは作業員に積み付けるように指示する
請求項6に記載のピッキングロボットシステム。
【請求項9】
ワークをピック元容器からピックし、出荷容器にプレースするピッキングロボットを制御するピッキングロボット制御方法であり、
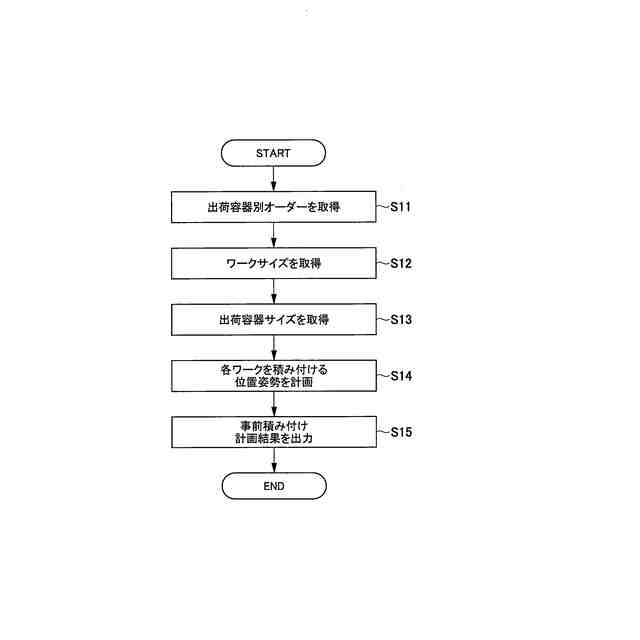
出荷容器にどのワークをいくつ積み付けるかの出荷容器別オーダーと、ワークのサイズ情報と、出荷容器のサイズ情報とから、それぞれのワークをプレースする位置姿勢を事前に計画する事前積み付け計画処理と、
ワークの認識を行う認識処理と、
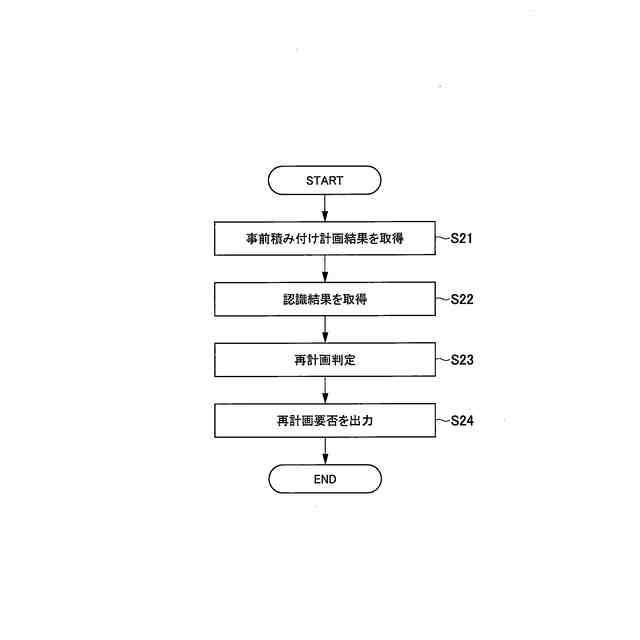
ワークの積み付けの再計画が必要かを判定する再計画判定処理と、
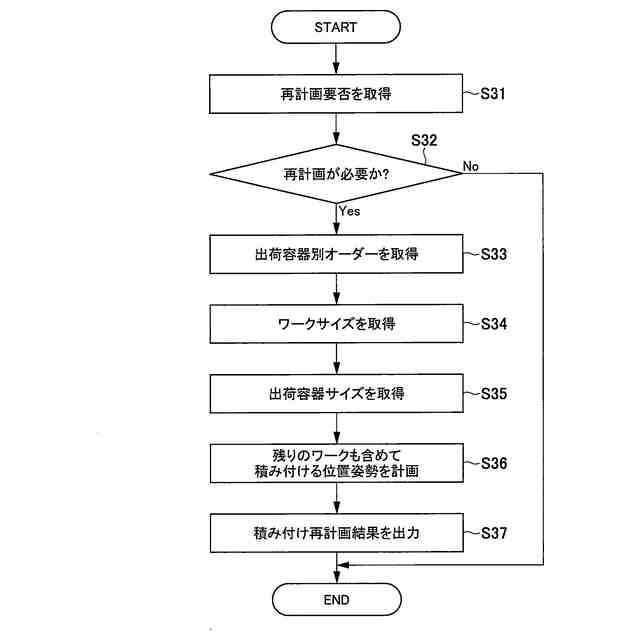
再計画が必要と判定された場合に、前記出荷容器別オーダーの残りのワークまで含めてプレースする位置姿勢を計画する積み付け再計画処理と、
前記積み付け再計画処理による積み付け再計画の結果が制約を満たしているかを判定する制約判定処理と、
事前積み付け計画結果もしくは積み付け再計画結果に従ってワークを積み付ける積み付け処理と、を含む
ピッキングロボット制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ピッキングロボットシステムおよびピッキングロボット制御方法に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
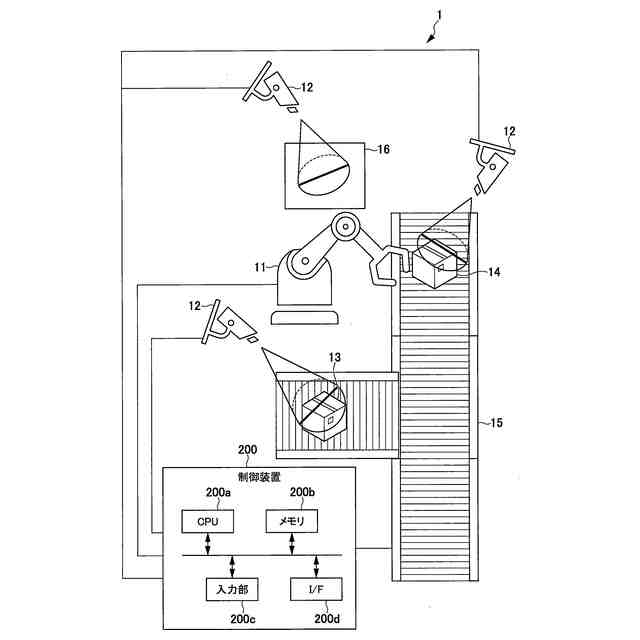
近年、物流倉庫での出荷時の搬送作業をロボットで自動化することが行われている。
例えば、出荷対象物であるワーク(物品)を物流倉庫の在庫からピッキングして、出荷用の収納容器に入れるピッキング作業を、ピッキングロボットにより自動化することが進められている。このように、出荷用の収納容器に入れるピッキング作業時には、ワークの積み付け位置姿勢を計画する必要がある。
【0003】
特許文献1には、積み付けるワークの位置姿勢を計画する技術が記載されている。すなわち、特許文献1には、ワークのサイズの情報から、積み付けるワークの位置姿勢を事前に計画し、計画と異なる姿勢でしかピックできない場合には、動的に積み付ける位置姿勢を計画する技術が記載されている。
【先行技術文献】
【特許文献】
【0004】
特許第6684404号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載の技術によれば、事前の計画と異なる位置姿勢のワークを把持する場合にも動的に計画を行うことで積み付けを継続できる。しかしながら、事前の計画の段階では、例えば収納容器内に多数のワークを積み付けるといった制約を満たした積み付けが可能であったが、異なる姿勢で積み付ける場合、その制約を満たした積み付けが可能であるとは言えない。したがって、ワークの姿勢が計画した段階から変わる場合に、正しく所望の数のワークを収納容器に入れるなどの制約を満たさなくなり、適正な出荷ができなくなるという問題があった。
【0006】
本発明の目的は、かかる点に鑑み、計画した段階からワークの姿勢が変わる場合においても、制約を満たした積み付けが可能なピッキングロボットシステムおよびピッキングロボット制御方法を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、例えば請求の範囲に記載の構成を採用する。
本願は、上記課題を解決する手段を複数含んでいるが、その一例を挙げるならば、ピッキングロボットシステムとして、ワークをピック元容器からピックし、出荷容器にプレースするものであり、
出荷容器にどのワークをいくつ積み付けるかの出荷容器別オーダーと、ワークのサイズ情報と、出荷容器のサイズ情報とから、それぞれのワークをプレースする位置姿勢を事前に計画する事前積み付け計画部と、
ワークの認識を行う認識部と、
ワークの積み付けの再計画が必要かを判定する再計画判定部と、
再計画が必要と判定された場合に、出荷容器別オーダーの残りのワークまで含めてプレースする位置姿勢を計画する積み付け再計画部と、
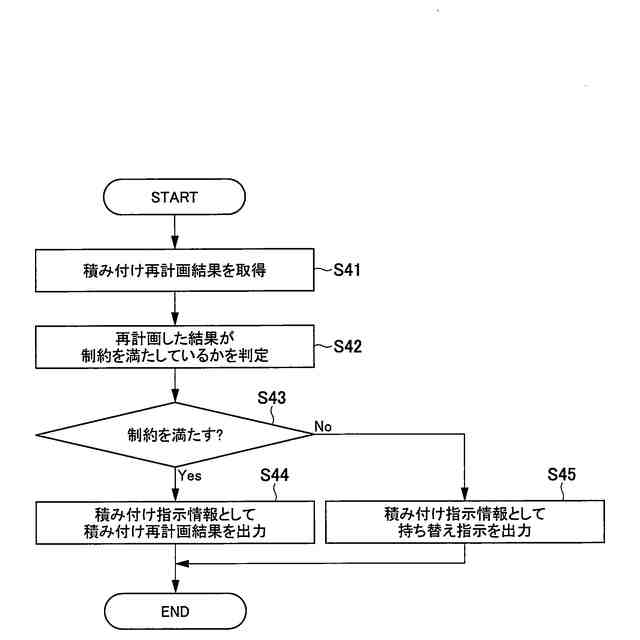
積み付け再計画部による積み付け再計画の結果が制約を満たしているかを判定する制約判定部と、
事前積み付け計画結果もしくは積み付け再計画結果に従ってワークを積み付ける積み付け部と、を備える。
【発明の効果】
【0008】
本発明によれば、ワークの姿勢が計画した段階から変わる場合においても制約を満たした積み付けが可能であることを保証することができる。
上記した以外の課題、構成および効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0009】
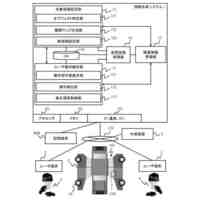
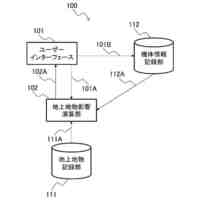
本発明の第1の実施の形態例に係るピッキングロボットシステムの例を示す構成図である。
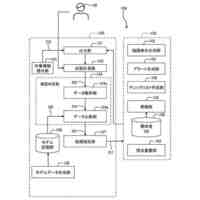
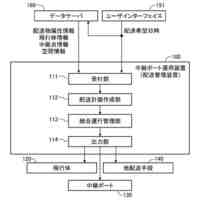
本発明の第1の実施の形態例に係るピッキングロボットシステムの機能構成例を示すブロック図である。
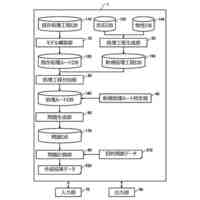
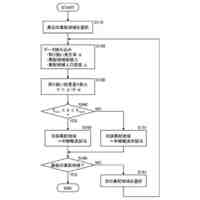
本発明の第1の実施の形態例に係るピッキングロボットシステムの事前積み付け計画部の処理例を示すフローチャートである。
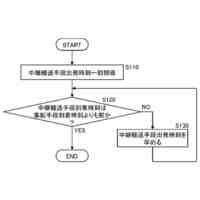
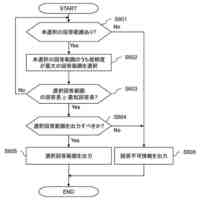
本発明の第1の実施の形態例に係るピッキングロボットシステムの再計画判定部の処理例を示すフローチャートである。
本発明の第1の実施の形態例に係るピッキングロボットシステムの積み付け再計画部の処理例を示すフローチャートである。
本発明の第1の実施の形態例に係るピッキングロボットシステムの制約判定部の処理例を示すフローチャートである。
本発明の第1の実施の形態例に係るピッキングロボットシステムの積み付け部の処理例を示すフローチャートである。
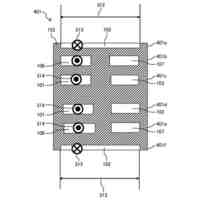
本発明の第1の実施の形態例に係るピッキングロボットシステムにおいて、再計画した結果が制約を満たさない場合の積み付けの具体例(例1)を示す図である。
本発明の第1の実施の形態例に係るピッキングロボットシステムにおいて、再計画した結果が制約を満たさない場合の積み付けの具体例(例2)を示す図である。
本発明の第1の実施の形態例に係るピッキングロボットシステムにおいて、再計画した結果が制約を満たさない場合の積み付けの具体例(例3)を示す図である。
本発明の第1の実施の形態例に係るピッキングロボットシステム再計画した結果が制約を満たす場合の積み付けの具体例(例1)を示す図である。
本発明の第1の実施の形態例に係るピッキングロボットシステムにおいて、再計画した結果が制約を満たす場合の積み付けの具体例(例2)を示す図である。
本発明の第1の実施の形態例に係るピッキングロボットシステムにおいて、再計画した結果が制約を満たす場合の積み付けの具体例(例3)を示す図である。
本発明の第1の実施の形態例に係るピッキングロボットシステムにおいて、積み付け再計画の前倒しによる持ち替え最小となる積み付けの具体例を示した図である。
本発明の第2の実施の形態例に係るピッキングロボットシステムの例を示す構成図である。
本発明の第2の実施の形態例に係るピッキングロボットシステムの機能構成例を示すブロック図である。
【発明を実施するための形態】
【0010】
<第1の実施の形態例>
以下、本発明の第1の実施の形態例のピッキングロボットシステムおよびピッキングロボット制御方法を、図1~図14を参照して説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社日立製作所
電力変換装置
13日前
株式会社日立製作所
情報共有システム
今日
株式会社日立製作所
情報共有システム
今日
株式会社日立製作所
情報共有システム
今日
株式会社日立製作所
中継要否決定装置
13日前
株式会社日立製作所
品質管理システム
13日前
株式会社日立製作所
軌条車両用空気調和装置
13日前
株式会社日立製作所
学習装置、及び学習方法
13日前
株式会社日立製作所
決定システム及び決定方法
13日前
株式会社日立製作所
設計支援装置及び設計支援方法
13日前
株式会社日立製作所
作業支援装置および作業支援方法
13日前
株式会社日立製作所
集配管理システムおよび集配管理方法
13日前
株式会社日立製作所
ツール比較システム及びツール比較方法
13日前
株式会社日立製作所
対話システムの制御装置、その制御方法
1日前
株式会社日立製作所
中継地点決定装置及び中継地点決定方法
13日前
株式会社日立製作所
遺伝子分析方法および遺伝子分析キット
13日前
株式会社日立製作所
サービス管理装置及びサービス管理方法
13日前
株式会社日立製作所
ケミカルリサイクルルート作成システム
13日前
株式会社日立製作所
生成装置、生成方法および生成プログラム
13日前
株式会社日立製作所
文書の要約を生成するシステムおよび方法
14日前
株式会社日立製作所
乗客コンベア、及び、乗客コンベアの油受
14日前
株式会社日立製作所
中継要否決定装置および中継要否決定方法
13日前
株式会社日立製作所
中継ポート運用装置及び中継ポート運用方法
13日前
株式会社日立製作所
計算機システム及び推論の不確実性判定方法
13日前
株式会社日立製作所
回転電機および回転電機を用いた空気圧縮機
今日
株式会社日立製作所
運転方法提案装置、並びに運転方法提案方法
13日前
株式会社日立製作所
計算機、寿命予測方法、寿命予測プログラム
13日前
株式会社日立製作所
電力需給管理システム及び電力需給管理方法
13日前
株式会社日立製作所
生産計画装置、生産計画方法およびプログラム
13日前
株式会社日立製作所
鉄道通信システム及び車上通信プラットフォーム
今日
株式会社日立製作所
ステレオ画像処理装置およびステレオ画像処理方法
13日前
株式会社日立製作所
集配中継地点決定装置および集配中継地点決定方法
13日前
株式会社日立製作所
輸送管理装置、輸送管理方法及び輸送管理システム
13日前
株式会社日立製作所
分散台帳システム、及び分散台帳システムの制御方法
13日前
株式会社日立製作所
列車ダイヤ変更支援装置及び列車ダイヤ変更支援方法
14日前
株式会社日立製作所
設計実行装置、設計実行システム、および設計実行方法
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ