TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024179020
公報種別
公開特許公報(A)
公開日
2024-12-26
出願番号
2023097501
出願日
2023-06-14
発明の名称
計算機システム及び推論の不確実性判定方法
出願人
株式会社日立製作所
代理人
藤央弁理士法人
主分類
G06T
7/00 20170101AFI20241219BHJP(計算;計数)
要約
【課題】セマンティックセグメンテーションの推論において信頼できない領域を、要因ごとに分類する。
【解決手段】計算機システムは、画像に含まれる画素を複数のクラスに分類するための推論に用いるモデルの定義情報を保持する。モデルは、画素の、複数のクラスの各々に該当する確率を算出するモデルである。計算機システムは、画像の入力を受け付け、複数回の推論の結果に基づいて、画像の各画素について、複数のクラスの確率分布を算出し、画像の各画素について、複数のクラスの確率分布を統計処理することによって、画素に対する推論の不確実性を表す不確実性指標を複数算出し、画像の各画素について、複数の不確実性指標に基づいて、不確実性の区分である不確実性レベルを付与し、画像の各画素の不確実性レベルを提示するための不確実性マップを生成する。
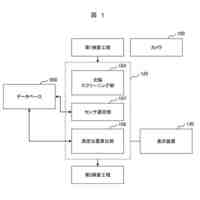
【選択図】図3
特許請求の範囲
【請求項1】
計算機システムであって、
プロセッサ及び前記プロセッサに接続される記憶装置を有する計算機を備え、
画像に含まれる画素を複数のクラスに分類するための推論に用いるモデルの定義情報を保持し、
前記モデルは、前記画素の、前記複数のクラスの各々に該当する確率を算出するモデルであって、
前記プロセッサは、
画像の入力を受け付け、
前記定義情報によって定義される前記モデルを変形したモデルを用いて前記画像に対する推論を複数回実行し、
複数回の前記推論の結果に基づいて、前記画像の各画素について、前記複数のクラスの各々について確率分布を算出し、
前記画像の各画素について、前記複数のクラスの各々の前記確率分布を統計処理することによって、前記画素に対する前記推論の不確実性を表す不確実性指標を複数算出し、
前記画像の各画素について、前記複数の不確実性指標に基づいて、不確実性の区分である不確実性レベルを付与し、
前記画像の各画素の前記不確実性レベルを提示するための不確実性マップを生成し、出力することを特徴とする計算機システム。
続きを表示(約 3,300 文字)
【請求項2】
請求項1に記載の計算機システムであって、
前記プロセッサは、
前記確率分布の最頻値、中央値、又は平均値が最大の前記クラスの分散を第1不確実性指標として算出し、
前記確率分布の最頻値、中央値、又は平均値の大きさが3番目より小さい前記クラスの前記確率分布の最頻値、中央値、又は平均値の合計を第2不確実性指標として算出し、
前記第1不確実性指標及び前記第2不確実性指標を用いて、前記推論の結果が信頼できることを表す第1レベル、前記推論の結果が信頼できないことを表す第2レベル、前記画素が異なる前記クラスの領域の境界に位置することを表す第3レベルの三つの前記不確実性レベルを付与することを特徴とする計算機システム。
【請求項3】
請求項2に記載の計算機システムであって、
前記プロセッサは、
前記画素の前記第1不確実性指標が第1閾値より小さいか否かを判定し、
前記画素の前記第1不確実性指標が第1閾値より小さい場合、前記第1レベルを付与し、
前記画素の前記第1不確実性指標が第1閾値以上である場合、前記画素の前記第2不確実性指標が第2閾値より大きいか否かを判定し、
前記画素の前記第2不確実性指標が第2閾値より大きい場合、前記第2レベルを付与し、
前記画素の前記第2不確実性指標が第2閾値以下の場合、前記確率分布の最頻値、中央値、又は平均値の大きさが1番目及び2番目の前記クラスの前記確率分布の重なり具合を評価する評価指標を算出し、前記評価指標が前記第1不確実性指標より小さいか否かを判定し、
前記評価指標が前記第1不確実性指標より小さい場合、前記第3レベルを付与することを特徴とする計算機システム。
【請求項4】
請求項3に記載の計算機システムであって、
前記プロセッサは、
前記不確実性レベルが付与されていない前記画素を特定し、
特定された前記画素であって、同じ前記クラスに属する前記画素が形成する判定領域の大きさが第3閾値より小さいか否かを判定し、
前記判定領域が前記第3閾値より小さい場合、前記判定領域に含まれる前記画素に、前記判定領域が小さいことを表す第4レベルを付与することを特徴とする計算機システム。
【請求項5】
請求項3に記載の計算機システムであって、
前記プロセッサは、
ユーザから、確認する前記不確実性レベルの指定を受け付け、
指定された前記不確実性レベルが付与された前記画素を強調表示する前記不確実性マップを生成することを特徴とする計算機システム。
【請求項6】
請求項5に記載の計算機システムであって、
前記プロセッサは、
前記画像を複数の部分画像に分割し、
前記部分画像について、指定された前記不確実性レベルが付与された前記画素の前記部分画像における比率を算出し、
前記比率が第4閾値より大きい前記部分画像を特定し、
特定された前記部分画像に含まれ、かつ、指定された前記不確実性レベルが付与された前記画素を強調表示する前記不確実性マップを生成することを特徴とする計算機システム。
【請求項7】
計算機システムが実行する推論の不確実性判定方法であって、
前記計算機システムは、
プロセッサ及び前記プロセッサに接続される記憶装置を有する計算機を備え、
画像に含まれる画素を複数のクラスに分類するための推論に用いるモデルの定義情報を保持し、
前記モデルは、前記画素の、前記複数のクラスの各々に該当する確率を算出するモデルであって、
前記推論の不確実性判定方法は、
前記計算機システムが、画像の入力を受け付ける第1のステップと、
前記計算機システムが、前記定義情報によって定義される前記モデルを変形したモデルを用いて前記画像に対する推論を複数回実行する第2のステップと、
前記計算機システムが、複数回の前記推論の結果に基づいて、前記画像の各画素について、前記複数のクラス各々について確率分布を算出する第3のステップと、
前記計算機システムが、前記画像の各画素について、前記複数のクラスの各々の前記確率分布を統計処理することによって、前記画素に対する前記推論の不確実性を表す不確実性指標を複数算出する第4のステップと、
前記計算機システムが、前記画像の各画素について、前記複数の不確実性指標に基づいて、不確実性の区分である不確実性レベルを付与する第5のステップと、
前記計算機システムが、前記画像の各画素の前記不確実性レベルを提示するための不確実性マップを生成し、出力する第6のステップと、
を含むことを特徴とする推論の不確実性判定方法。
【請求項8】
請求項7に記載の推論の不確実性判定方法であって、
前記第4のステップは、
前記計算機システムが、前記確率分布の最頻値、中央値、又は平均値が最大の前記クラスの分散を第1不確実性指標として算出するステップと、
前記計算機システムが、前記確率分布の最頻値、中央値、又は平均値の大きさが3番目より小さい前記クラスの前記確率分布の最頻値、中央値、又は平均値の合計を第2不確実性指標として算出するステップと、を含み、
前記第5のステップは、前記計算機システムが、前記第1不確実性指標及び前記第2不確実性指標を用いて、前記推論の結果が信頼できることを表す第1レベル、前記推論の結果が信頼できないことを表す第2レベル、前記画素が異なる前記クラスの領域の境界に位置することを表す第3レベルの三つの前記不確実性レベルを付与するステップを含むことを特徴とする推論の不確実性判定方法。
【請求項9】
請求項8に記載の推論の不確実性判定方法であって、
前記第5のステップは、
前記計算機システムが、前記画素の前記第1不確実性指標が第1閾値より小さいか否かを判定するステップと、
前記画素の前記第1不確実性指標が第1閾値より小さい場合、前記計算機システムが、前記第1レベルを付与するステップと、
前記画素の前記第1不確実性指標が第1閾値以上である場合、前記計算機システムが、前記画素の前記第2不確実性指標が第2閾値より大きいか否かを判定するステップと、
前記画素の前記第2不確実性指標が第2閾値より大きい場合、前記計算機システムが、前記第2レベルを付与するステップと、
前記画素の前記第2不確実性指標が第2閾値以下の場合、前記計算機システムが、前記確率分布の最頻値、中央値、又は平均値の大きさが1番目及び2番目の前記クラスの前記確率分布の重なり具合を評価する評価指標を算出し、前記評価指標が前記第1不確実性指標より小さいか否かを判定するステップと、
前記評価指標が前記第1不確実性指標より小さい場合、前記計算機システムが、前記第3レベルを付与するステップと、を含むことを特徴とする推論の不確実性判定方法。
【請求項10】
請求項9に記載の推論の不確実性判定方法であって、
前記第5のステップは、
前記計算機システムが、前記不確実性レベルが付与されていない前記画素を特定するステップと、
前記計算機システムが、特定された前記画素であって、同じ前記クラスに属する前記画素が形成する判定領域の大きさが第3閾値より小さいか否かを判定するステップと、
前記計算機システムが、前記判定領域が前記第3閾値より小さい場合、前記判定領域に含まれる前記画素に、前記判定領域が小さいことを表す第4レベルを付与するステップと、を含むことを特徴とする推論の不確実性判定方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、セマンティックセグメンテーションにおける推論結果の不確実性を定量的に評価し、不確実性のレベル付けを行う技術に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
様々な分野において画像を複数の領域に分類する処理に人工知能(AI)の利用が進んでいる。例えば、材料科学の分野では、AIを用いて、組織画像から特徴量を抽出し、物性との関係性をモデル化することで、新材料開発の効率化が期待されている。組織特徴を解析するAIの機械学習モデルとしてセマンティックセグメンテーション(SS)が広く用いられている。
【0003】
機械学習モデルの出力である推論結果は、推論の精度とともに、不確実性を評価することが重要である。不確実性を定量化する手法として特許文献1に記載の手法が知られている。特許文献1には、モンテカルロドロップアウトを反復適用し、不確実性を評価することが記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2018-200677号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の不確実性の指標は連続値である。そのため、当該値を用いることによって、信頼できる領域及び信頼できない領域を特定できる。
【0006】
セマンティックセグメンテーションの推論の不確実性の要因は様々考えられる。しかし、特許文献1に記載の指標を用いても、信頼できない領域がどのような要因に起因するかを判別することは難しい。
【0007】
本開示は、セマンティックセグメンテーションの推論において信頼できない領域を、要因ごとに分類する技術を提供する。
【課題を解決するための手段】
【0008】
本願において開示される発明の代表的な一例を示せば以下の通りである。すなわち、計算機システムであって、プロセッサ及び前記プロセッサに接続される記憶装置を有する計算機を備え、画像に含まれる画素を複数のクラスに分類するための推論に用いるモデルの定義情報を保持し、前記モデルは、前記画素の、前記複数のクラスの各々に該当する確率を算出するモデルであって、前記プロセッサは、画像の入力を受け付け、前記定義情報によって定義される前記モデルを変形したモデルを生成し、当該モデルを用いて前記画像を推論する処理を複数回実行し、複数回の前記推論の結果に基づいて、前記画像の各画素について、前記複数のクラスの各々について確率分布を算出し、前記画像の各画素について、前記複数のクラスの各々の前記確率分布を統計処理することによって、前記画素に対する前記推論の不確実性を表す不確実性指標を複数算出し、前記画像の各画素について、前記複数の不確実性指標に基づいて、不確実性の区分である不確実性レベルを付与し、前記画像の各画素の前記不確実性レベルを提示するための不確実性マップを生成し、出力する。
【発明の効果】
【0009】
本開示の一つの態様によれば、セマンティックセグメンテーションの推論において信頼できない領域を、要因ごとに分類できる。上記した以外の課題、構成及び効果は、以下の実施例の説明により明らかにされる。
【図面の簡単な説明】
【0010】
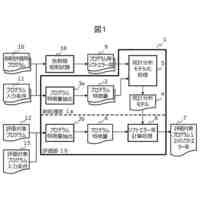
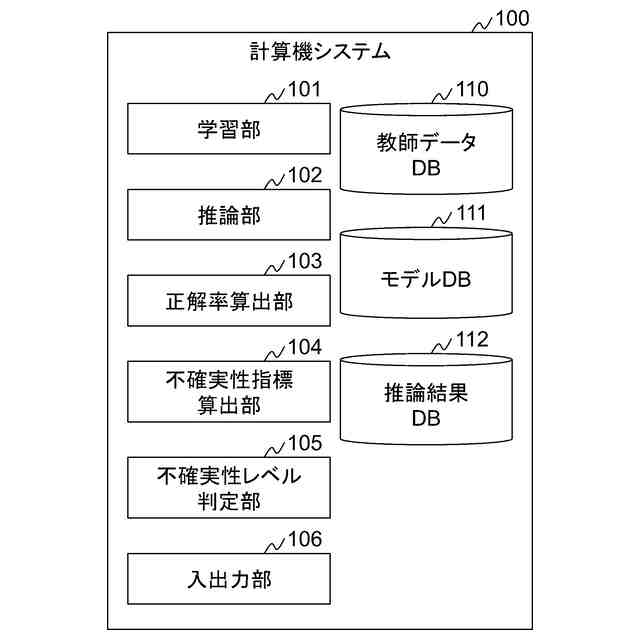
実施例1の計算機システムの機能構成の一例を示す図である。
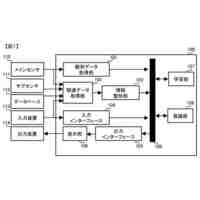
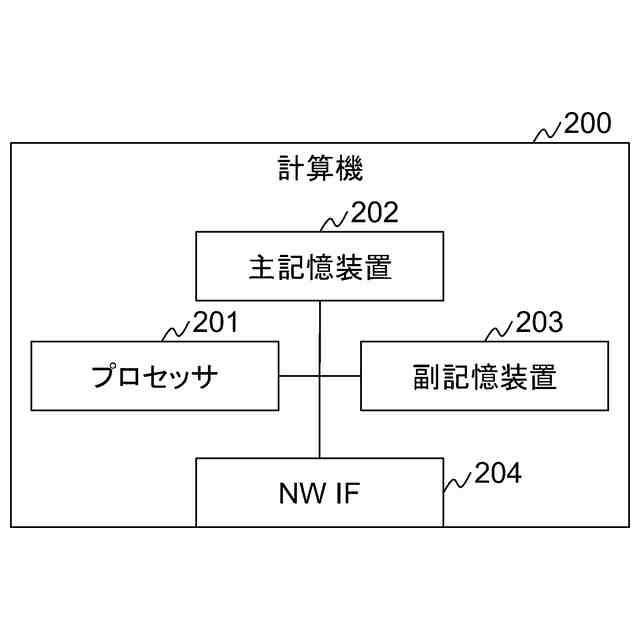
実施例1の計算機システムを構成する計算機のハードウェア構成の一例を示す図である。
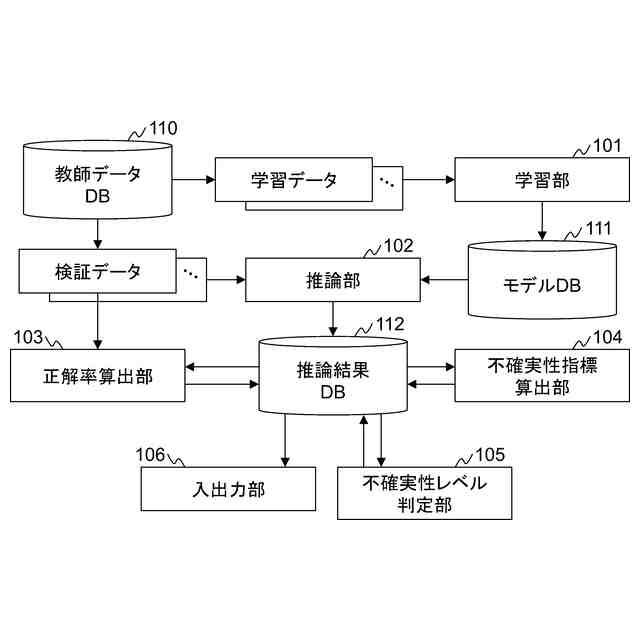
実施例1の計算機システムの機能の連携を示す図である。
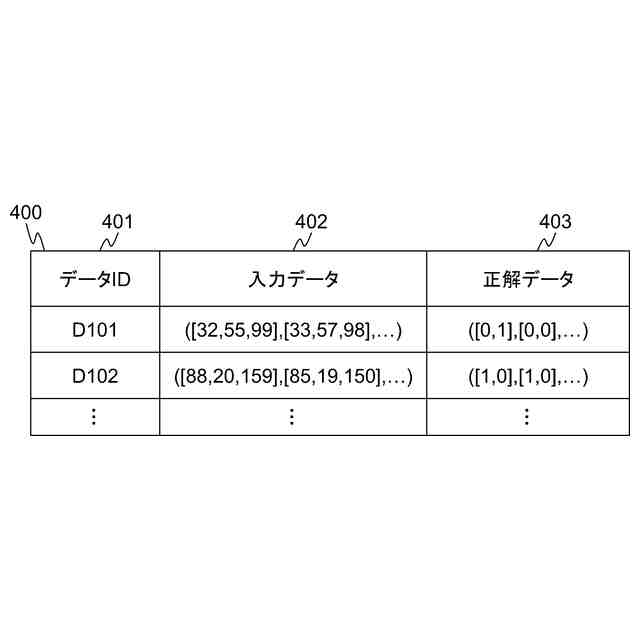
実施例1の教師データDBのデータ構造の一例を示す図である。
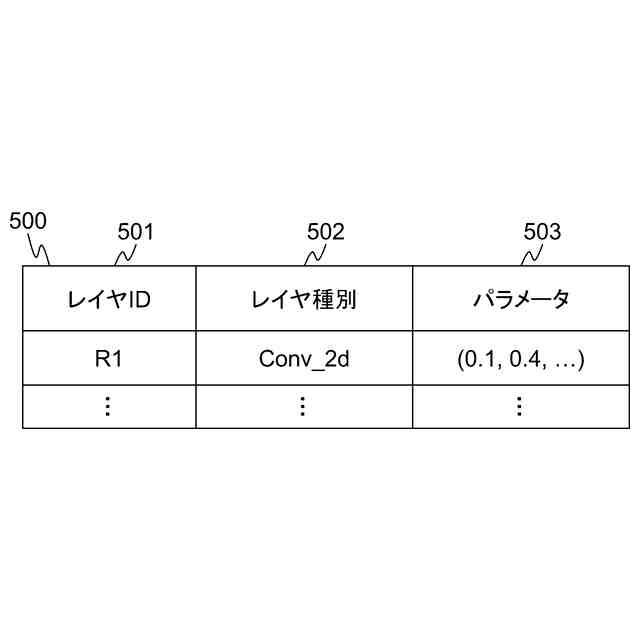
実施例1のモデルDBのデータ構造の一例を示す図である。
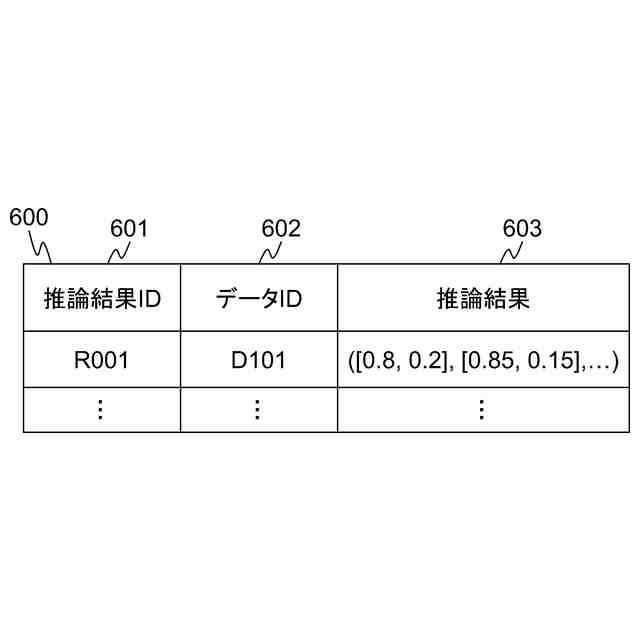
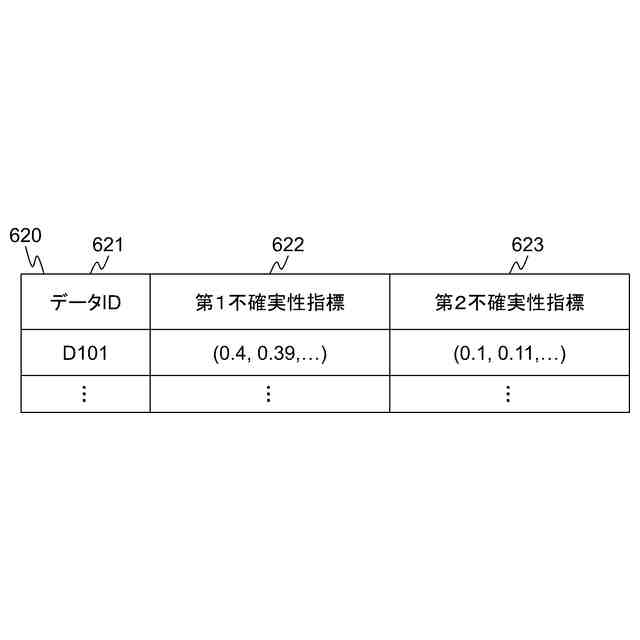
実施例1の推論結果DBのデータ構造の一例を示す図である。
実施例1の推論結果DBのデータ構造の一例を示す図である。
実施例1の推論結果DBのデータ構造の一例を示す図である。
実施例1の推論結果DBのデータ構造の一例を示す図である。
セマンティックセグメンテーションの推論の特性を説明する図である。
セマンティックセグメンテーションの推論の特性を説明する図である。
セマンティックセグメンテーションの推論の特性を説明する図である。
セマンティックセグメンテーションの推論の特性を説明する図である。
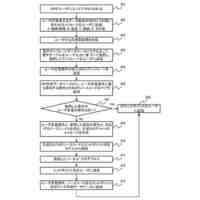
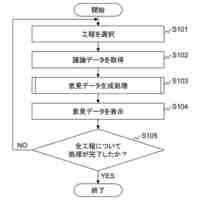
実施例1の計算機システムが実行する推論処理の一例を説明するフローチャートである。
実施例1の計算機システムが算出するクラスの確率分布の一例を示す図である。
実施例1の計算機システムが実行する不確実性レベル判定処理の一例を説明するフローチャートである。
実施例1の計算機システムが実行する不確実性レベル判定処理の一例を説明するフローチャートである。
実施例1における不確実性指標及び正解率の相関の一例を示す図である。
実施例1における不確実性指標及び正解率の相関の一例を示す図である。
実施例1における評価指標の算出方法の一例を示す図である。
実施例1の計算機システムが実行する不確実性マップ生成処理の一例を説明するフローチャートである。
実施例1の計算機システムが提示するGUIの一例を示す図である。
実施例2の不確実性マップの一例を示す図である。
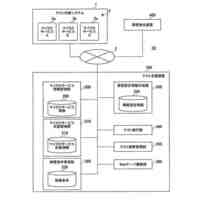
実施例3の計算機システムの機能構成の一例を示す図である。
実施例3の計算機システムの機能の連携を示す図である。
実施例3の計算機システムが実行する推論処理の一例を説明するフローチャートである。
実施例3の計算機システムが実行する推論結果出力処理の一例を説明するフローチャートである。
実施例3の計算機システムが提示するGUIの一例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社日立製作所
電力変換システム
5日前
株式会社日立製作所
システム検証方法
20日前
株式会社日立製作所
鉄道車両用空調装置
19日前
株式会社日立製作所
乗降床及び乗客コンベア
18日前
株式会社日立製作所
施設管理装置および方法
5日前
株式会社日立製作所
店舗管理装置および方法
20日前
株式会社日立製作所
生産ライン設計システム
13日前
株式会社日立製作所
乗りかご及びエレベーター
21日前
株式会社日立製作所
署名照合システム及び方法
26日前
株式会社日立製作所
検索システム及び検索方法
20日前
株式会社日立製作所
飲食店提案装置および方法
20日前
株式会社日立製作所
乗りかご及びエレベーター
20日前
株式会社日立製作所
ソースコードを生成する方法
13日前
株式会社日立製作所
宇宙機、地上局及びアンテナ
5日前
株式会社日立製作所
生体認証装置、生体認証方法
19日前
株式会社日立製作所
膜分離設備設計支援システム
5日前
株式会社日立製作所
ソフトエラー率評価システム
6日前
株式会社日立製作所
ガス分離システムの劣化診断装置
5日前
株式会社日立製作所
スカートモール及び乗客コンベア
5日前
株式会社日立製作所
物体検出装置および物体検出方法
26日前
株式会社日立製作所
立体構造宇宙機及びその制御方法
18日前
株式会社日立製作所
購入関連行動分析装置および方法
19日前
株式会社日立製作所
情報処理方法及び情報処理システム
21日前
株式会社日立製作所
単体テスト装置及び単体テスト方法
21日前
株式会社日立製作所
計算機システム及びデータ送信方法
27日前
株式会社日立製作所
テスト支援装置及びテスト支援方法
5日前
株式会社日立製作所
欠陥検査システム、及び欠陥検査方法
5日前
株式会社日立製作所
データ処理装置およびデータ処理方法
18日前
株式会社日立製作所
計算機システムおよびアクセス検証方法
18日前
株式会社日立製作所
計算機システム及び構想策定の支援方法
5日前
株式会社日立製作所
分析装置、分析システムおよび分析方法
5日前
株式会社日立製作所
農業経営支援装置および農業経営支援方法
18日前
株式会社日立製作所
対話型時系列分析システムおよびその方法
28日前
株式会社日立製作所
電力変換装置及び電力変換装置の制御方法
18日前
株式会社日立製作所
支援装置、支援方法、及び支援プログラム
27日前
株式会社日立製作所
ガス分離システムおよびガス分離プラント
5日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ