TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024167945
公報種別
公開特許公報(A)
公開日
2024-12-05
出願番号
2023084284
出願日
2023-05-23
発明の名称
監視システム、監視方法、およびプログラム
出願人
横河電機株式会社
代理人
弁理士法人RYUKA国際特許事務所
主分類
A01G
7/00 20060101AFI20241128BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
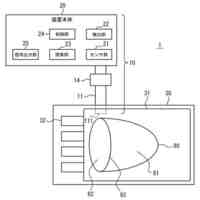
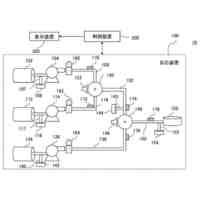
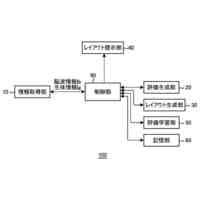
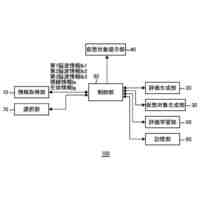
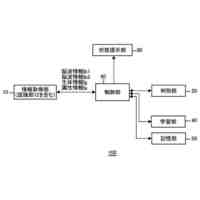
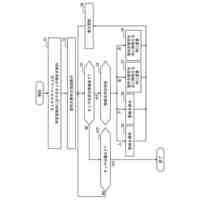
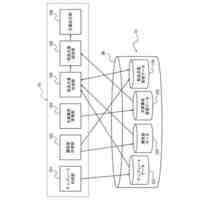
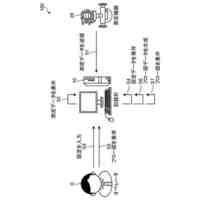
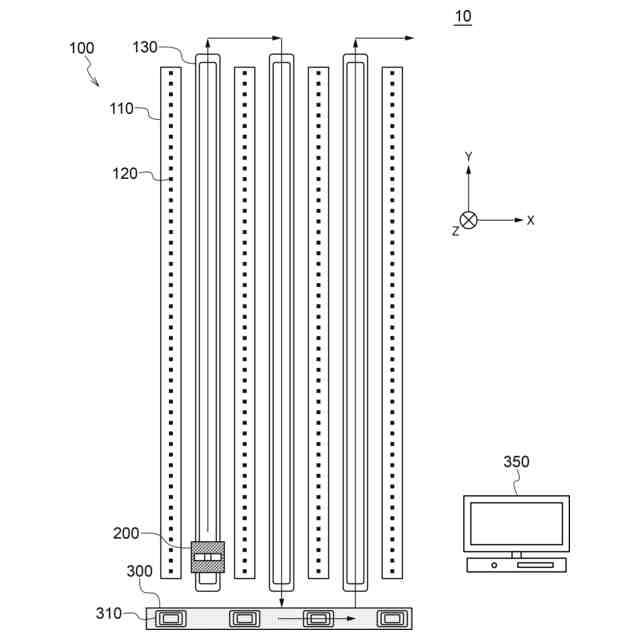
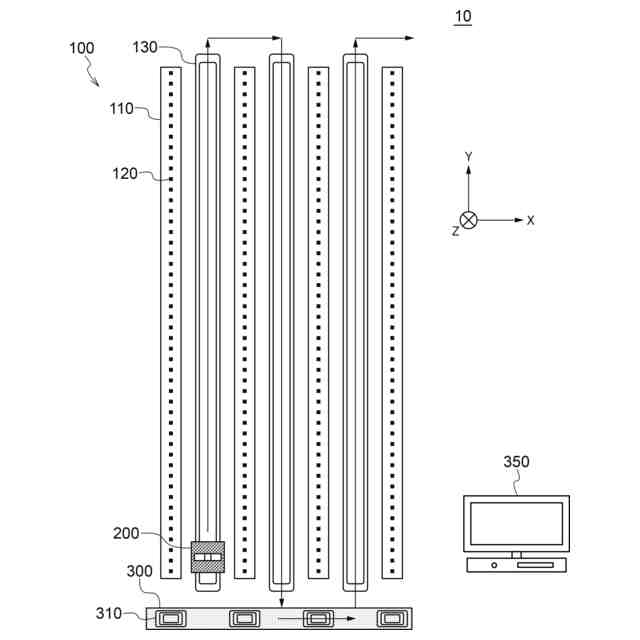
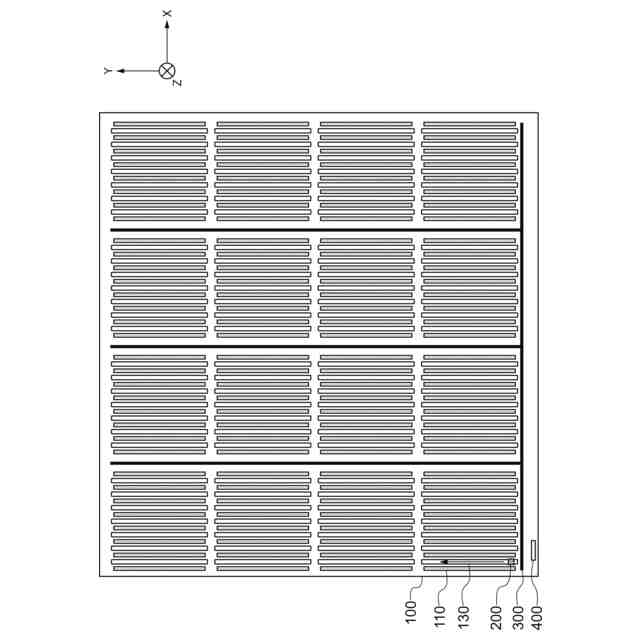
【解決手段】植物の栽培領域を走行して、植物の栽培状況を示すデータを取得するデータ取得装置と、データ取得装置を制御する制御部と、データ取得装置を無線で充電する無線給電部と、を備える監視システムを提供する。制御部は、データ取得装置により取得したデータが示す栽培状況またはデータ取得装置の充電量の少なくとも一方に基づいて、データ取得装置の走行経路を決定する走行計画決定部を有する。走行計画決定部は、データ取得装置の充電量が閾値未満になったことに応じて、無線給電部でデータ取得装置が充電可能なように、データ取得装置の走行経路を決定する。
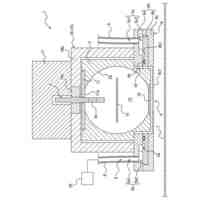
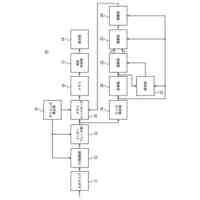
【選択図】図1
特許請求の範囲
【請求項1】
植物の栽培領域を走行して、前記植物の栽培状況を示すデータを取得するデータ取得装置と、
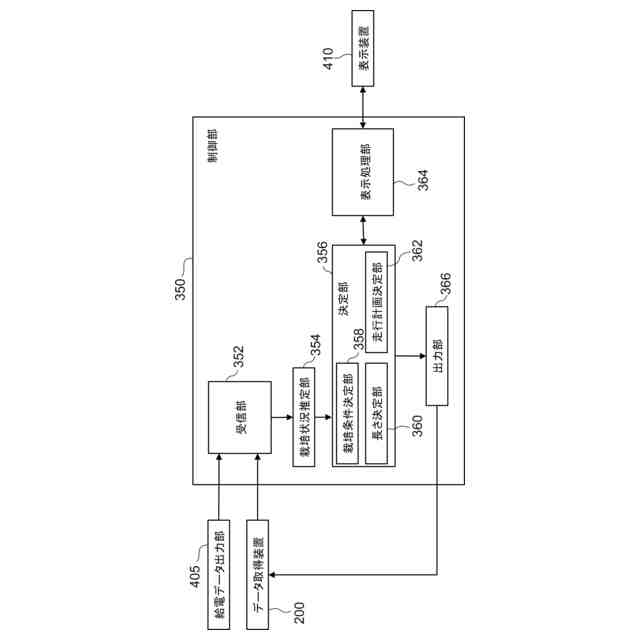
前記データ取得装置を制御する制御部と、
前記データ取得装置を無線で充電する無線給電部と、を備える
監視システム。
続きを表示(約 1,100 文字)
【請求項2】
前記制御部は、前記データ取得装置により取得したデータが示す栽培状況または前記データ取得装置の充電量の少なくとも一方に基づいて、前記データ取得装置の走行経路を決定する走行計画決定部を有する
請求項1に記載の監視システム。
【請求項3】
前記走行計画決定部は、前記データ取得装置の充電量が閾値未満になったことに応じて、前記無線給電部で前記データ取得装置が充電可能なように、前記データ取得装置の走行経路を決定する
請求項2に記載の監視システム。
【請求項4】
前記走行計画決定部は、前記栽培領域の一部について、前記取得したデータが栽培状況が不良であることを示すことに応じて、前記栽培領域の一部におけるデータ取得頻度が前記栽培領域の他の部分におけるデータ取得頻度よりも高くなるように、前記データ取得装置の走行経路を決定する
請求項2に記載の監視システム。
【請求項5】
前記無線給電部は、前記栽培領域における前記データ取得装置の走行路に配置される
請求項1に記載の監視システム。
【請求項6】
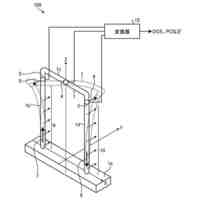
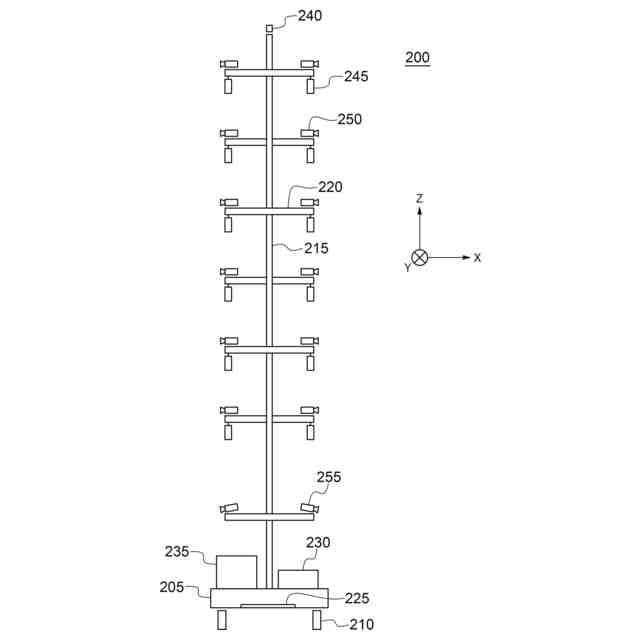
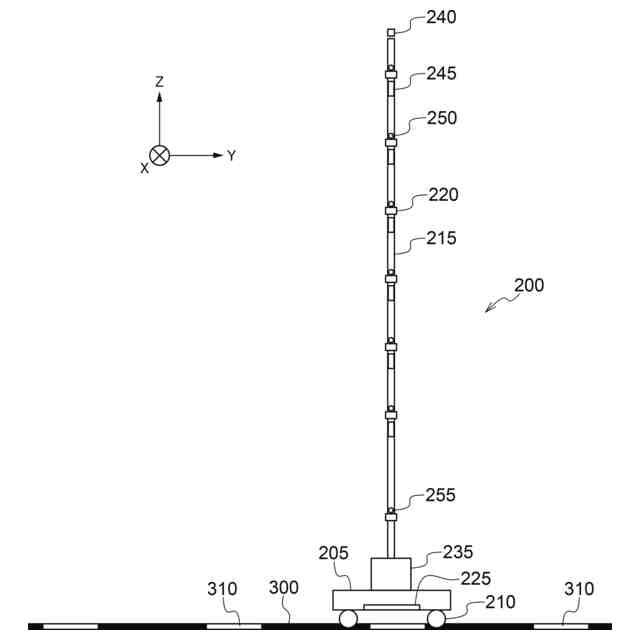
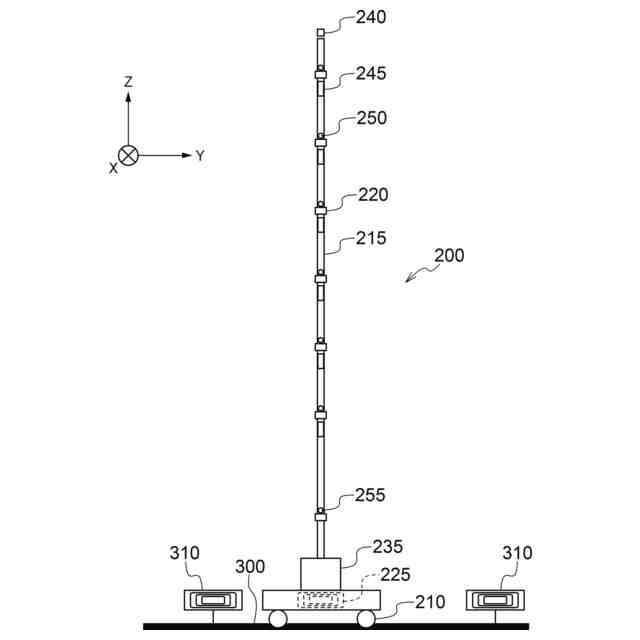
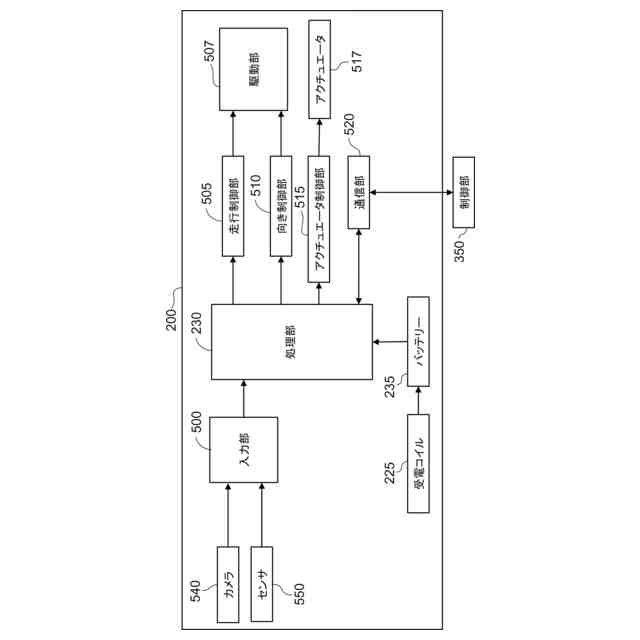
前記データ取得装置は、
前記植物の栽培状況を示すデータを検出するセンサが取り付けられるアームと、
前記アームを保持する支柱と、
前記支柱の端部が固定される本体部と、
前記本体部に取り付けられるタイヤとを有する
請求項1に記載の監視システム。
【請求項7】
前記アームまたは前記支柱の少なくとも一方は伸縮可能である
請求項6に記載の監視システム。
【請求項8】
前記制御部は、前記データ取得装置により取得したデータが示す栽培状況に応じた前記アームまたは前記支柱の少なくとも一方の長さを決定する長さ決定部を有する
請求項7に記載の監視システム。
【請求項9】
前記長さ決定部は、前記決定した長さに応じて、前記アームまたは前記支柱の少なくとも一方を伸縮させる、または前記決定した前記アームまたは前記支柱の少なくとも一方の長さを表示装置に表示させる表示データを生成する
請求項8に記載の監視システム。
【請求項10】
前記データ取得装置が前記無線給電部から給電されたことを示す給電データを出力する給電データ出力部を更に備え、
前記制御部は、前記給電データ出力部により出力された給電データの受信に応じて、前記データ取得装置の位置検出、または前記データ取得装置の走行速度を小さくする制御の少なくとも一方を行う
請求項1に記載の監視システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、監視システム、監視方法、およびプログラムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1には、「1つもしくは複数の栽培ロボット102と、栽培ロボット102が取得したデータを処理する栽培管理ユニット105と、外部情報を入手して、栽培管理ユニット105に伝達する外部環境モニタリングユニット106とを備える栽培ロボットシステムを用い、温室100に栽培される栽培作物101の成長度合いを管理する。上述の栽培ロボット102は、飛行機能、あるいはホバリング機能を備える小型の羽ばたきロボットであり、さらに温湿度センサ、風力センサ、および照度センサ等を備えることで、温室100内の温度、湿度、気流、照度等のデータを3次元的に取得でき、個々の作物100の生育環境を正確に把握できる」と記載されている(要約)。特許文献2には、「受電側の数にかかわらず、整合回路およびスイッチ部が不要となり、構造の簡略化が図られる無線給電装置およびこれを用いた工場設備を提供することを目的とする」と記載されている(要約)。
[先行技術文献]
[特許文献]
特許文献1 特開2004-016182号公報
特許文献2 特開2020-137180号公報
【発明の概要】
【0003】
本発明の第1の態様においては、植物の栽培領域を走行して、植物の栽培状況を示すデータを取得するデータ取得装置と、データ取得装置を制御する制御部と、データ取得装置を無線で充電する無線給電部と、を備える監視システムを提供する。
【0004】
上記の装置において、制御部は、データ取得装置により取得したデータが示す栽培状況またはデータ取得装置の充電量の少なくとも一方に基づいて、データ取得装置の走行経路を決定する走行計画決定部を有してよい。
【0005】
上記の装置において、走行計画決定部は、データ取得装置の充電量が閾値未満になったことに応じて、無線給電部でデータ取得装置が充電可能なように、データ取得装置の走行経路を決定してよい。
【0006】
上記のいずれかの装置において、走行計画決定部は、栽培領域の一部について、取得したデータが栽培状況が不良であることを示すことに応じて、栽培領域の一部におけるデータ取得頻度が栽培領域の他の部分におけるデータ取得頻度よりも高くなるように、データ取得装置の走行経路を決定してよい。
【0007】
上記のいずれかの装置において、無線給電部は、栽培領域におけるデータ取得装置の走行路に配置されてよい。
【0008】
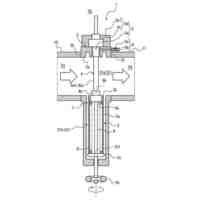
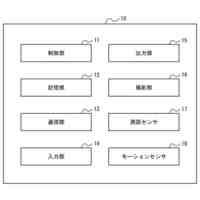
上記のいずれかの装置において、データ取得装置は、植物の栽培状況を示すデータを検出するセンサが取り付けられるアームと、アームを保持する支柱と、支柱の端部が固定される本体部と、本体部に取り付けられるタイヤとを有してよい。
【0009】
上記の装置において、アームまたは支柱の少なくとも一方は伸縮可能であってよい。
【0010】
制御部は、データ取得装置により取得したデータが示す栽培状況に応じたアームまたは支柱の少なくとも一方の長さを決定する長さ決定部を有してよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
横河電機株式会社
減衰器
15日前
横河電機株式会社
燃焼装置
12日前
横河電機株式会社
光源装置
2日前
横河電機株式会社
流路装置
23日前
横河電機株式会社
電磁流量計
1か月前
横河電機株式会社
差動プローブ
16日前
横河電機株式会社
コリオリ質量流量計
1か月前
横河電機株式会社
光学系および光学測定器
1日前
横河電機株式会社
検出装置及び燃焼システム
12日前
横河電機株式会社
検出装置及び燃焼システム
12日前
横河電機株式会社
波形測定器及び波形測定方法
16日前
横河電機株式会社
装置、方法およびプログラム
15日前
横河電機株式会社
装置、方法、及びプログラム
8日前
横河電機株式会社
装置、方法、及びプログラム
8日前
横河電機株式会社
装置、方法、及びプログラム
8日前
横河電機株式会社
装置、方法、及びプログラム
8日前
横河電機株式会社
装置、方法、およびプログラム
15日前
横河電機株式会社
制御装置、制御方法、及びプログラム
25日前
横河電機株式会社
放射線源シャッター装置および測定装置
8日前
横河電機株式会社
支援装置、支援方法および支援プログラム
16日前
横河電機株式会社
支援装置、支援方法および支援プログラム
16日前
横河電機株式会社
支援装置、支援方法および支援プログラム
16日前
横河電機株式会社
制御方法、制御システム及び制御プログラム
12日前
横河電機株式会社
情報処理装置、制御方法、及び制御プログラム
15日前
横河電機株式会社
情報処理装置、情報処理方法、及びプログラム
25日前
横河電機株式会社
情報処理装置、制御方法、及び制御プログラム
15日前
横河電機株式会社
情報処理装置、情報処理方法、及び、プログラム
12日前
横河電機株式会社
制御コントローラ、設定方法および設定プログラム
15日前
横河電機株式会社
測定器、測定システム、制御方法、及びプログラム
12日前
横河電機株式会社
記録計、情報管理方法、および情報管理プログラム
8日前
横河電機株式会社
情報提供装置、情報提供方法及び情報提供プログラム
1か月前
横河電機株式会社
情報提供装置、情報提供方法及び情報提供プログラム
23日前
横河電機株式会社
光ファイバ特性測定装置及び光ファイバ特性測定方法
23日前
横河電機株式会社
波形測定器、プログラム、及び、波形測定器の制御方法
15日前
横河電機株式会社
図面解析装置、図面解析方法、および図面解析プログラム
25日前
横河電機株式会社
作成支援装置、作成支援方法、および作成支援プログラム
15日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ