TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025005237
公報種別
公開特許公報(A)
公開日
2025-01-16
出願番号
2023105345
出願日
2023-06-27
発明の名称
波形測定器及び波形測定方法
出願人
横河電機株式会社
,
横河計測株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G01P
3/481 20060101AFI20250108BHJP(測定;試験)
要約
【課題】回転体の回転速度が変化する場合であっても、回転体の回転角度をより高い精度で記録可能にする。
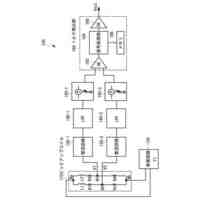
【解決手段】波形測定器は、回転体が1回転するたびにセンサーから信号を入力する入力部と、前記入力部が第1信号を入力してから、当該第1信号の次の前記信号である第2信号を入力するまでの時間である第1回転周期と、前記入力部が前記第2信号を入力してから、当該第2信号の次の前記信号である第3信号を入力するまでの時間である第2回転周期と、に基づいて、前記回転体の回転初速度及び角加速度を算出する演算部と、前記算出された回転初速度及び角加速度に基づき算出された前記回転体の角度を記憶部に記憶させるメモリコントローラと、を備える。
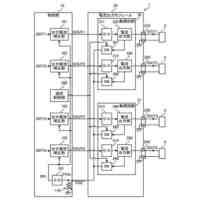
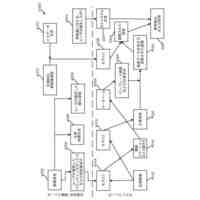
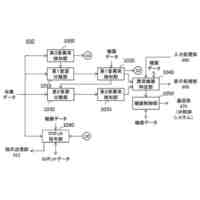
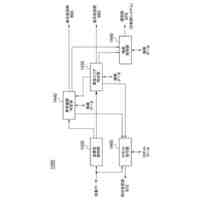
【選択図】図4
特許請求の範囲
【請求項1】
回転体が1回転するたびにセンサーから信号を入力する入力部と、
前記入力部が第1信号を入力してから、当該第1信号の次の前記信号である第2信号を入力するまでの時間である第1回転周期と、前記入力部が前記第2信号を入力してから、当該第2信号の次の前記信号である第3信号を入力するまでの時間である第2回転周期と、に基づいて、前記回転体の回転初速度及び角加速度を算出する演算部と、
前記算出された回転初速度及び角加速度に基づき算出された前記回転体の角度を記憶部に記憶させるメモリコントローラと、
を備える、波形測定器。
続きを表示(約 2,100 文字)
【請求項2】
前記入力部が前記信号を入力してから、当該信号の次の前記信号を入力するまでの時間である回転周期を算出する計数部と、
前記計数部により算出された、前記入力部が前記第1信号を入力してから前記第2信号を入力するまでの時間である前記第1回転周期を保存する保存部と、
を更に備え、
前記演算部は、前記計数部により算出された、前記入力部が前記第2信号を入力してから前記第3信号を入力するまでの時間である前記第2回転周期と、前記保存部に保存された前記第1回転周期とに基づいて、前記回転体の回転初速度及び角加速度を算出する、
請求項1に記載の、波形測定器。
【請求項3】
予め定められたサンプリング周期でサンプリングタイミング信号を出力するタイミング発生部を更に備え、
前記計数部は、前記入力部が前記信号を入力してから、当該信号の次の前記信号を入力するまでの間に、前記タイミング発生部が出力した前記サンプリングタイミング信号の個数により、前記回転周期を算出する、
請求項2に記載の波形測定器。
【請求項4】
前記演算部により算出された前記回転初速度に対して前記角加速度を積算して、前記回転体の回転速度を算出する第1積算部と、
前記第1積算部により算出された前記回転体の前記回転速度を積算して、前記回転体の角度を算出する第2積算部と、
を更に備え、
前記メモリコントローラは、前記第2積算部により算出された前記回転体の角度を前記記憶部に記憶させる、
請求項3に記載の波形測定器。
【請求項5】
前記第1積算部は、
前記入力部が前記信号を入力したことに応じて、前記演算部により算出された前記回転初速度により、当該第1積算部の積算値を初期化し、
前記タイミング発生部が前記サンプリングタイミング信号を出力したことに応じて、前記第1積算部の積算値に対して、前記演算部により算出された前記角加速度に前記サンプリング周期を乗じた値を加算し、
前記第2積算部は、
前記入力部が前記信号を入力したことに応じて、値0により、当該第2積算部の積算値を初期化し、
前記タイミング発生部が前記サンプリングタイミング信号を出力したことに応じて、前記第2積算部の積算値に対して、前記第1積算部の前記積算値に前記サンプリング周期を乗じた値を加算する、
請求項4に記載の波形測定器。
【請求項6】
前記演算部が算出した前記角加速度の移動平均を算出するローパスフィルタを更に備え、
前記第1積算部は、前記ローパスフィルタにより算出された前記角加速度の移動平均に基づき、前記回転体の回転速度を算出する、
請求項4に記載の波形測定器。
【請求項7】
前記回転体の角度の変化を示すグラフを作成して、表示部に表示させる、波形作成部を更に備える、請求項1から6のいずれか一項に記載の波形測定器。
【請求項8】
波形測定器の波形測定方法であって、
入力部が、回転体が1回転するたびにセンサーから信号を入力する工程と、
演算部が、前記入力部が第1信号を入力してから、当該第1信号の次の前記信号である第2信号を入力するまでの時間である第1回転周期と、前記入力部が前記第2信号を入力してから、当該第2信号の次の前記信号である第3信号を入力するまでの時間である第2回転周期と、に基づいて、前記回転体の回転初速度及び角加速度を算出する工程と、
メモリコントローラが、前記算出された回転初速度及び角加速度に基づき算出された前記回転体の角度を記憶部に記憶させる工程と、
を含む、波形測定方法。
【請求項9】
計数部が、前記入力部が前記信号を入力してから、当該信号の次の前記信号を入力するまでの時間である回転周期を算出する工程と、
保存部が、前記計数部により算出された、前記入力部が前記第1信号を入力してから前記第2信号を入力するまでの時間である前記第1回転周期を保存する工程と、
を更に含み、
前記演算部は、前記計数部により算出された、前記入力部が前記第2信号を入力してから前記第3信号を入力するまでの時間である前記第2回転周期と、前記保存部に保存された前記第1回転周期とに基づいて、前記回転体の回転初速度及び角加速度を算出する、
請求項8に記載の、波形測定方法。
【請求項10】
タイミング発生部が、予め定められたサンプリング周期でサンプリングタイミング信号を出力する工程を更に含み、
前記計数部は、前記入力部が前記信号を入力してから、当該信号の次の前記信号を入力するまでの間に、前記タイミング発生部が出力した前記サンプリングタイミング信号の個数により、前記回転周期を算出する、
請求項9に記載の波形測定方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、波形測定器及び波形測定方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
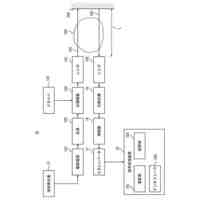
波形測定器は、被測定信号を測定し、その波形の解析及び表示等を行う装置である。例えば、デジタルオシロスコープは、このような波形測定器に当たる。非特許文献1には、モータ等の回転体に取り付けられた1回転あたり1パルスを出力するセンサーからの信号をもとに、回転体の回転角度を予測し、回転角度をリアルタイムに記録する波形測定器が記載されている。
【先行技術文献】
【非特許文献】
【0003】
中山悦郎、山本千秋、「スコープコーダDL850 リアルタイム演算機能」、横河技報、横河電機株式会社、2012年、第55巻、第1号、p.9-14
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、従来の構成は、回転体の回転速度が変化する場合に、回転角度を高い精度で記録するという点で改善の余地があった。
【0005】
本開示は、回転体の回転速度が変化する場合であっても、回転体の回転角度をより高い精度で記録可能にすることを目的とする。
【課題を解決するための手段】
【0006】
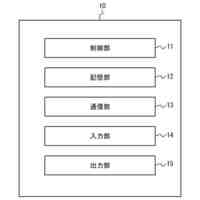
幾つかの実施形態に係る波形測定器は、
(1)回転体が1回転するたびにセンサーから信号を入力する入力部と、
前記入力部が第1信号を入力してから、当該第1信号の次の前記信号である第2信号を入力するまでの時間である第1回転周期と、前記入力部が前記第2信号を入力してから、当該第2信号の次の前記信号である第3信号を入力するまでの時間である第2回転周期と、に基づいて、前記回転体の回転初速度及び角加速度を算出する演算部と、
前記算出された回転初速度及び角加速度に基づき算出された前記回転体の角度を記憶部に記憶させるメモリコントローラと、
を備える。
【0007】
このように、波形測定器は、第2回転周期だけでなく、第1回転周期も利用して回転体の回転初速度及び角加速度を算出し、この回転初速度及び角加速度に基づき算出された回転体の角度を算出する。したがって、波形測定器は、回転体の回転速度が変化する場合であっても、回転体の角加速度を反映して、回転体の回転角度をより高い精度で記録することが可能である。
【0008】
一実施形態において、
(2)(1)の波形測定器において、
前記入力部が前記信号を入力してから、当該信号の次の前記信号を入力するまでの時間である回転周期を算出する計数部と、
前記計数部により算出された、前記入力部が前記第1信号を入力してから前記第2信号を入力するまでの時間である前記第1回転周期を保存する保存部と、
を更に備え、
前記演算部は、前記計数部により算出された、前記入力部が前記第2信号を入力してから前記第3信号を入力するまでの時間である前記第2回転周期と、前記保存部に保存された前記第1回転周期とに基づいて、前記回転体の回転初速度及び角加速度を算出してもよい。
【0009】
このように、波形測定器は、計数部及び保存部を備え、第1回転周期を保存部に保存して当該第1回転周期に基づき回転体の回転初速度及び角加速度を算出する。したがって、波形測定器は、保存部を参照して、回転体の回転初速度及び角加速度を算出することが可能である。
【0010】
一実施形態において、
(3)(2)の波形測定器において、
予め定められたサンプリング周期でサンプリングタイミング信号を出力するタイミング発生部を更に備え、
前記計数部は、前記入力部が前記信号を入力してから、当該信号の次の前記信号を入力するまでの間に、前記タイミング発生部が出力した前記サンプリングタイミング信号の個数により、前記回転周期を算出してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
横河電機株式会社
電流出力装置
1か月前
横河電機株式会社
プラント運転支援装置
8日前
横河電機株式会社
フィールド機器及び診断方法
1か月前
横河電機株式会社
装置、方法およびプログラム
8日前
横河電機株式会社
ガス分析計及びガス分析方法
23日前
横河電機株式会社
光パルス試験器及びプログラム
1か月前
横河電機株式会社
視点補正を伴う熱イメージング
1か月前
横河電機株式会社
分光分析装置及び分光分析方法
14日前
横河電機株式会社
伝熱装置、加熱装置及び処理装置
1か月前
横河電機株式会社
ガス測定装置およびガス測定方法
1か月前
横河電機株式会社
装置、システム、方法およびプログラム
1か月前
横河電機株式会社
分析装置、分析方法および分析プログラム
10日前
横河電機株式会社
制御装置
21日前
横河電機株式会社
情報処理装置、情報処理システム及び情報処理装置の制御方法
17日前
横河電機株式会社
キャプション生成装置、キャプション生成方法およびプログラム
1日前
横河電機株式会社
キャプション生成装置、キャプション生成方法およびプログラム
1日前
横河電機株式会社
キャプション生成装置、キャプション生成方法およびプログラム
1日前
横河電機株式会社
キャプション生成装置、キャプション生成方法およびプログラム
1日前
横河電機株式会社
検知装置、時刻同期方法、時刻同期プログラム、及び検知システム
16日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
9日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
9日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
9日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
9日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
9日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
9日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
9日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
9日前
日本精機株式会社
表示装置
24日前
日本精機株式会社
液面検出装置
2日前
株式会社チノー
測定装置
1か月前
大和製衡株式会社
組合せ秤
2日前
大和製衡株式会社
組合せ秤
8日前
大和製衡株式会社
組合せ秤
2日前
有限会社原製作所
検出回路
22日前
日本無線株式会社
レーダ装置
23日前
個人
フロートレス液面センサー
15日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ