TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025093608
公報種別
公開特許公報(A)
公開日
2025-06-24
出願番号
2023209359
出願日
2023-12-12
発明の名称
施設内で検出された音響データを処理する装置、方法、およびプログラム
出願人
横河電機株式会社
代理人
弁理士法人RYUKA国際特許事務所
主分類
G05D
1/243 20240101AFI20250617BHJP(制御;調整)
要約
【課題】施設内で検出された音響データを処理する装置を提供する。
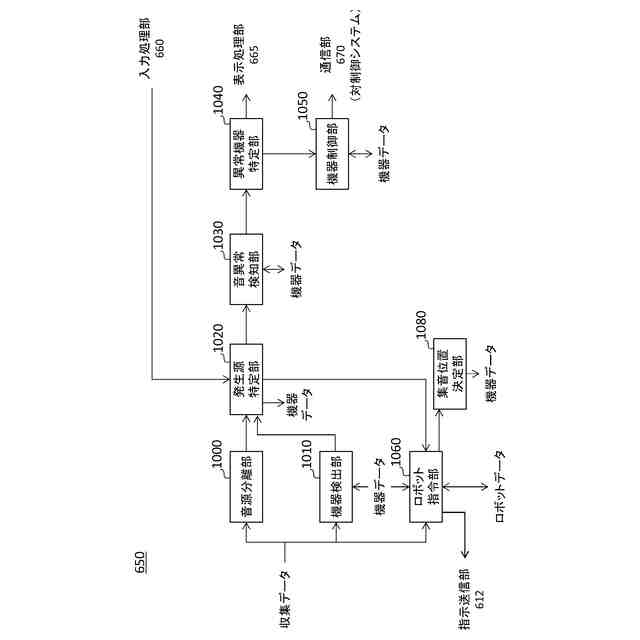
【解決手段】施設内を移動して集音することができるロボットにより検出された音響データを取得する音響データ取得部と、前記ロボットに対して前記音響データに含まれる、異音検知の対象機器の音の音圧がより大きくなる位置を探索させるロボット指令部と、前記音圧がより大きくなる位置の探索結果に基づいて、前記対象機器の音を集音する集音位置を決定する集音位置決定部とを備え、前記ロボット指令部は、前記音圧が閾値を超えたことに応じて前記ロボットによる探索を終了させる。
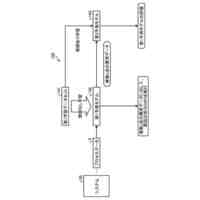
【選択図】図10
特許請求の範囲
【請求項1】
施設内を移動して集音することができるロボットにより検出された音響データを取得する音響データ取得部と、
前記ロボットに対して前記音響データに含まれる、異音検知の対象機器の音の音圧がより大きくなる位置を探索させるロボット指令部と、
前記音圧がより大きくなる位置の探索結果に基づいて、前記対象機器の音を集音する集音位置を決定する集音位置決定部と
を備える装置。
続きを表示(約 1,100 文字)
【請求項2】
前記ロボット指令部は、前記音圧が閾値を超えたことに応じて前記ロボットによる探索を終了させる請求項1に記載の装置。
【請求項3】
前記ロボット指令部は、
予め定められた一定時間に亘り、前記ロボットにより前記音圧がより大きくなる位置を探索させ、
前記一定時間の経過後に前記ロボットによる探索を終了させる
請求項1に記載の装置。
【請求項4】
前記ロボット指令部は、前記ロボットと前記対象機器との間に遮蔽物がある場合に、前記対象機器との間に前記遮蔽物がない位置に前記ロボットを移動させる請求項1に記載の装置。
【請求項5】
前記ロボット指令部は、前記ロボットの移動に伴い前記音圧が増加することに応じて前記ロボットの進行方向を維持し、前記ロボットの移動に伴い前記音圧が増加しなくなったことまたは前記音圧が減少したことに応じて前記ロボットの進行方向を変えることを前記ロボットに指示する請求項1に記載の装置。
【請求項6】
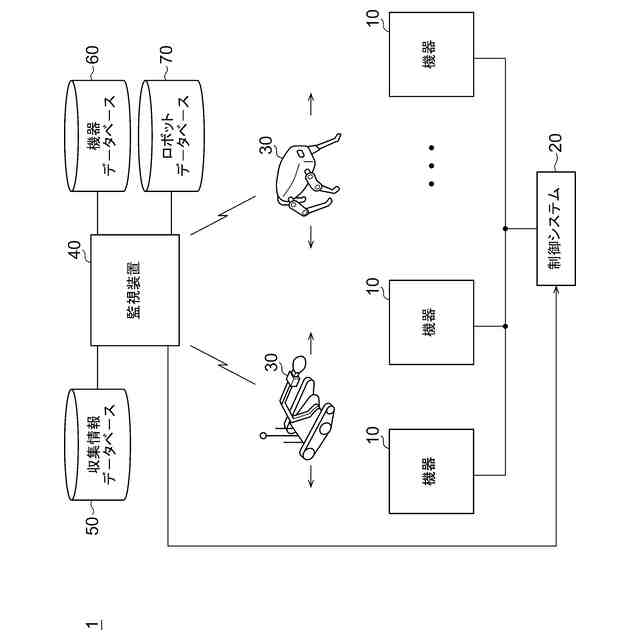
前記施設内の複数の機器のそれぞれについての機器データを記録する機器データベースに接続される機器データベース接続部と、
決定された前記対象機器の集音位置を前記機器データベースに登録する集音位置登録部と
を備える請求項1に記載の装置。
【請求項7】
少なくとも1つの機器の音を集音する処理において、前記ロボット指令部は、当該少なくとも1つの機器それぞれに対して前記機器データベースに登録された各集音位置に前記ロボットを移動させて集音させる請求項6に記載の装置。
【請求項8】
前記音響データに基づいて、前記対象機器の異常を特定する異常機器特定部を備える請求項1に記載の装置。
【請求項9】
前記対象機器の異常が特定されたことに応じて、前記施設内の前記対象機器または他の機器のうちの少なくとも1つに対して前記対象機器の異常に対処するための制御を行う機器制御部を備える請求項8に記載の装置。
【請求項10】
施設内を移動して集音することができるロボットにより検出された音響データを取得する音響データ取得段階と、
前記ロボットに対して前記音響データに含まれる、異音検知の対象機器の音の音圧がより大きくなる位置を探索させるロボット指令段階と、
前記音圧がより大きくなる位置の探索結果に基づいて、前記対象機器の音を集音する集音位置を決定する集音位置決定段階と
を備える方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、施設内で検出された音響データを処理する装置、方法、およびプログラムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
特許文献1,2には「操作室からの運転員による指令によって、現場巡視ロボットを現場を自動巡視させ、現場映像と現場音声等をリアルタイムに取得し、操作室にて運転員が漏れなく機器の現状況を確認可能とする」(特許文献1の段落0005)ことなどが記載されている。
[先行技術文献]
[特許文献]
[特許文献1] 特開2000-39914号公報
[特許文献2] 特開2020-149349号公報
【発明の概要】
【0003】
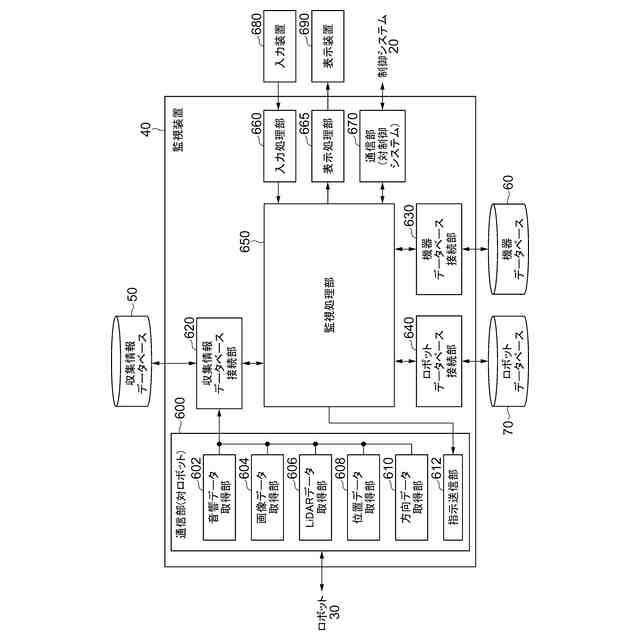
本発明の第1の態様においては、施設内を移動して集音することができるロボットにより検出された音響データを取得する音響データ取得部と、前記ロボットに対して前記音響データに含まれる、異音検知の対象機器の音の音圧がより大きくなる位置を探索させるロボット指令部と、前記音圧がより大きくなる位置の探索結果に基づいて、前記対象機器の音を集音する集音位置を決定する集音位置決定部とを備える装置を提供する。
【0004】
上記の装置において、前記ロボット指令部は、前記音圧が閾値を超えたことに応じて前記ロボットによる探索を終了させてよい。
【0005】
上記何れかの装置において、前記ロボット指令部は、予め定められた一定時間に亘り、前記ロボットにより前記音圧がより大きくなる位置を探索させ、前記一定時間の経過後に前記ロボットによる探索を終了させてよい。
【0006】
上記何れかの装置において、前記ロボット指令部は、前記ロボットと前記対象機器との間に遮蔽物がある場合に、前記対象機器との間に前記遮蔽物がない位置に前記ロボットを移動させてよい。
【0007】
上記何れかの装置において、前記ロボット指令部は、前記ロボットの移動に伴い前記音圧が増加することに応じて前記ロボットの進行方向を維持し、前記ロボットの移動に伴い前記音圧が増加しなくなったことまたは前記音圧が減少したことに応じて前記ロボットの進行方向を変えることを前記ロボットに指示してよい。
【0008】
上記何れかの装置は、前記施設内の複数の機器のそれぞれについての機器データを記録する機器データベースに接続される機器データベース接続部と、決定された前記対象機器の集音位置を前記機器データベースに登録する集音位置登録部とを備えてよい。
【0009】
上記の装置において、少なくとも1つの機器の音を集音する処理において、前記ロボット指令部は、当該少なくとも1つの機器それぞれに対して前記機器データベースに登録された各集音位置に前記ロボットを移動させて集音させてよい。
【0010】
上記何れかの装置は、前記音響データに基づいて、前記対象機器の異常を特定する異常機器特定部を備えてよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
横河電機株式会社
圧力センサ
1か月前
横河電機株式会社
電流出力装置
1か月前
横河電機株式会社
プラント運転支援装置
3日前
横河電機株式会社
ガス分析計及びガス分析方法
18日前
横河電機株式会社
フィールド機器及び診断方法
1か月前
横河電機株式会社
装置、方法およびプログラム
3日前
横河電機株式会社
光パルス試験器及びプログラム
1か月前
横河電機株式会社
視点補正を伴う熱イメージング
1か月前
横河電機株式会社
分光分析装置及び分光分析方法
9日前
横河電機株式会社
伝熱装置、加熱装置及び処理装置
1か月前
横河電機株式会社
ガス測定装置およびガス測定方法
26日前
横河電機株式会社
装置、システム、方法およびプログラム
1か月前
横河電機株式会社
分析装置、分析方法および分析プログラム
5日前
横河電機株式会社
制御装置
16日前
横河電機株式会社
情報処理装置、情報処理システム及び情報処理装置の制御方法
12日前
横河電機株式会社
検知装置、時刻同期方法、時刻同期プログラム、及び検知システム
11日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
4日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
4日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
4日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
4日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
4日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
4日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
4日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
4日前
横河電機株式会社
通信制御装置、通信制御方法、通信制御プログラム、及び通信制御システム
1か月前
株式会社FUJI
工作機械
4日前
株式会社ダイヘン
移動体
9日前
ローム株式会社
半導体集積回路
19日前
株式会社ダイフク
搬送設備
4日前
三栄ハイテックス株式会社
基準電圧回路
22日前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
ペダル機構
1か月前
株式会社オプトン
制御プログラム生成装置
2日前
株式会社鷺宮製作所
制御装置
3日前
三菱電機株式会社
自己位置推定装置
1か月前
株式会社ダイヘン
負荷時タップ切換器
9日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ