TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024166843
公報種別
公開特許公報(A)
公開日
2024-11-29
出願番号
2023083223
出願日
2023-05-19
発明の名称
計測方法、計測装置、計測システム及び計測プログラム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
G01P
21/00 20060101AFI20241122BHJP(測定;試験)
要約
【課題】鉄道車両が走行する橋梁に設けられた加速度センサーの状態を容易に判定することが可能な計測方法を提供すること。
【解決手段】鉄道車両が走行する橋梁に設けられた加速度センサーから出力される加速度データに基づいて重力加速度方向と直交しない第1方向の加速度を算出する第1方向加速度算出工程と、前記第1方向の加速度に基づいて、前記重力加速度方向と前記第1方向とのなす角度を特定する角度特定工程と、前記角度に基づいて、前記加速度センサーの状態を判定する状態判定工程と、を含む、計測方法。
【選択図】図10
特許請求の範囲
【請求項1】
鉄道車両が走行する橋梁に設けられた加速度センサーから出力される加速度データに基づいて重力加速度方向と直交しない第1方向の加速度を算出する第1方向加速度算出工程と、
前記第1方向の加速度に基づいて、前記重力加速度方向と前記第1方向とのなす角度を特定する角度特定工程と、
前記角度に基づいて、前記加速度センサーの状態を判定する状態判定工程と、
を含む、計測方法。
続きを表示(約 1,000 文字)
【請求項2】
請求項1において、
前記状態判定工程は、
前記角度に基づいて、前記加速度センサーの姿勢が正常であるか異常であるかを判定する工程を含む、計測方法。
【請求項3】
請求項1において、
前記状態判定工程は、
前記角度に基づいて、前記加速度センサーの前記重力加速度方向に対する感度誤差を算出する工程と、
前記感度誤差に基づいて、前記加速度センサーの姿勢が正常であるか異常であるかを判定する工程と、
を含む、計測方法。
【請求項4】
請求項1において、
前記状態判定工程は、
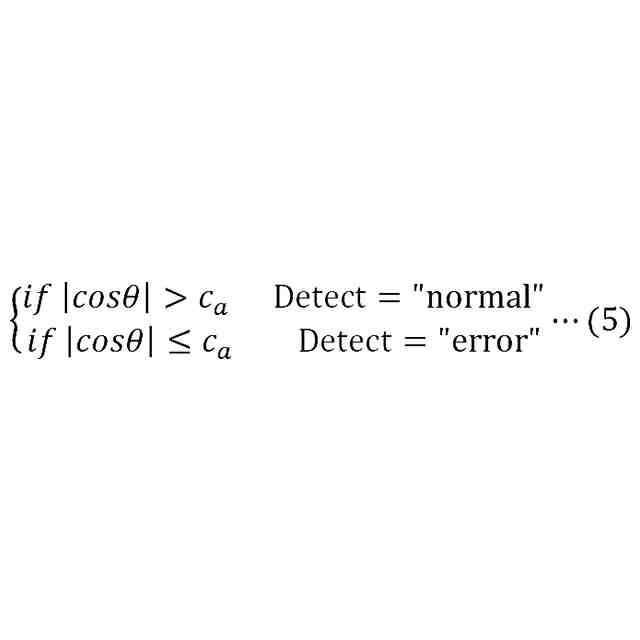
前記角度に基づいて、前記第1方向の加速度の極性を判定する工程を含む、計測方法。
【請求項5】
請求項4において、
前記第1方向の加速度に前記極性に応じた値を乗算した加速度を算出する極性値乗算工程を含む、計測方法。
【請求項6】
請求項1乃至5のいずれか一項において、
前記角度特定工程は、
所定期間における前記第1方向の加速度の平均値を算出する工程と、
重力加速度の値と前記第1方向の加速度の平均値とに基づいて、前記角度を特定する工程と、
を含む、計測方法。
【請求項7】
鉄道車両が走行する橋梁に設けられた加速度センサーから出力される加速度データに基づいて重力加速度方向と直交しない第1方向の加速度を算出する第1方向加速度算出部と、
前記第1方向の加速度に基づいて、前記重力加速度方向と前記第1方向とのなす角度を特定する角度特定部と、
前記角度に基づいて、前記加速度センサーの状態を判定する状態判定部と、
を含む、計測装置。
【請求項8】
請求項7に記載の計測装置と、
前記加速度センサーと、
を備えた、計測システム。
【請求項9】
鉄道車両が走行する橋梁に設けられた加速度センサーから出力される加速度データに基づいて重力加速度方向と直交しない第1方向の加速度を算出する第1方向加速度算出工程と、
前記第1方向の加速度に基づいて、前記重力加速度方向と前記第1方向とのなす角度を特定する角度特定工程と、
前記角度に基づいて、前記加速度センサーの状態を判定する状態判定工程と、
をコンピューターに実行させる、計測プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、計測方法、計測装置、計測システム及び計測プログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1には、基地局が取り付けられた建柱が傾くといった異常状態が生じた場合、互いに直交する2軸のうちの少なくとも1軸が水平方向に対して所定の傾斜角度をなすように固定部材に固定された2軸の加速度センサーを用いて異常状態を検出し、異常状態の発生を管理センターに自動的に通知する手法が提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2007-174591号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の手法では、固定部材を用いて、検出軸が水平方向に対して所定の角度で傾くように加速度センサーを設置する必要があるため高コストであり、加速度センサーの状態を容易に判定することができない。
【課題を解決するための手段】
【0005】
本発明に係る計測方法の一態様は、
鉄道車両が走行する橋梁に設けられた加速度センサーから出力される加速度データに基づいて重力加速度方向と直交しない第1方向の加速度を算出する第1方向加速度算出工程と、
前記第1方向の加速度に基づいて、前記重力加速度方向と前記第1方向とのなす角度を特定する角度特定工程と、
前記角度に基づいて、前記加速度センサーの状態を判定する状態判定工程と、
を含む。
【0006】
本発明に係る計測装置の一態様は、
鉄道車両が走行する橋梁に設けられた加速度センサーから出力される加速度データに基づいて重力加速度方向と直交しない第1方向の加速度を算出する第1方向加速度算出部と、
前記第1方向の加速度に基づいて、前記重力加速度方向と前記第1方向とのなす角度を特定する角度特定部と、
前記角度に基づいて、前記加速度センサーの状態を判定する状態判定部と、
を含む。
【0007】
本発明に係る計測システムの一態様は、
前記計測装置の一態様と、
前記加速度センサーと、
を備える。
【0008】
本発明に係る計測プログラムの一態様は、
鉄道車両が走行する橋梁に設けられた加速度センサーから出力される加速度データに基づいて重力加速度方向と直交しない第1方向の加速度を算出する第1方向加速度算出工程と、
前記第1方向の加速度に基づいて、前記重力加速度方向と前記第1方向とのなす角度を特定する角度特定工程と、
前記角度に基づいて、前記加速度センサーの状態を判定する状態判定工程と、
をコンピューターに実行させる。
【図面の簡単な説明】
【0009】
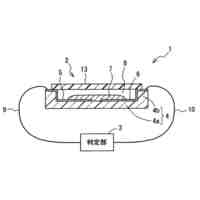
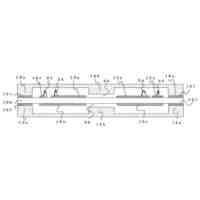
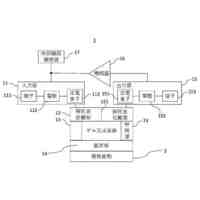
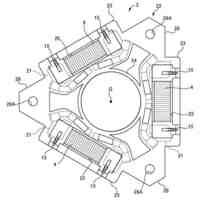
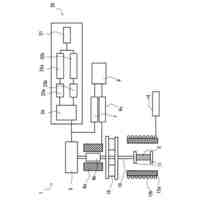
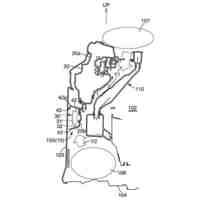
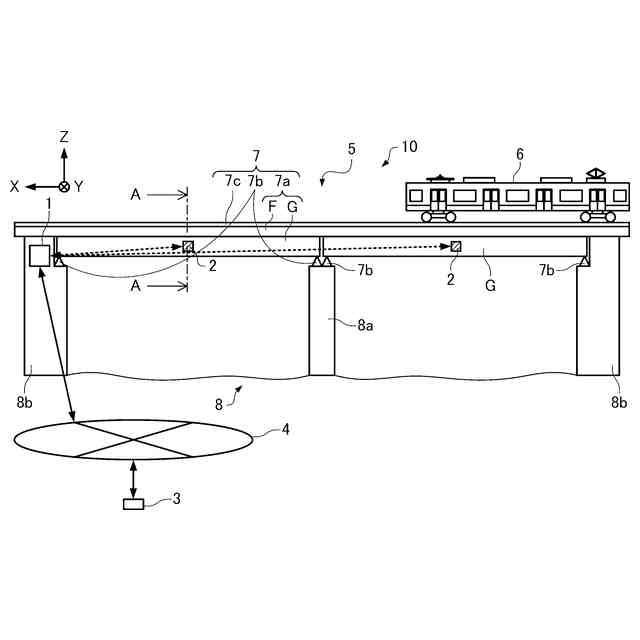
計測システムの構成例を示す図。
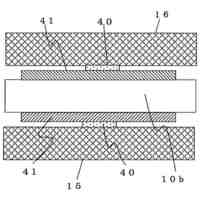
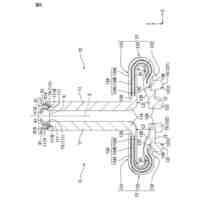
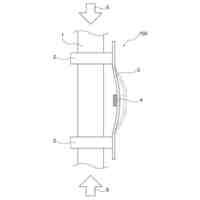
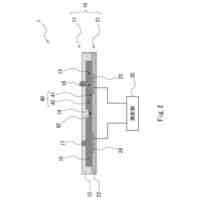
図1の上部構造をA-A線で切断した断面図。
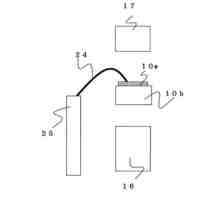
加速度センサーが検出する加速度の説明図。
重力加速度方向と第1方向とのなす角度θの説明図。
角度θと加速度α
d
のバイアスとの関係を示す図。
加速度α
d
の波形の一例を示す図。
加速度α
d
の波形の他の一例を示す図。
加速度α
d
の波形の他の一例を示す図。
cosθの経時的な変化の一例を示す図。
第1実施形態の計測方法の手順の一例を示すフローチャート図。
角度特定工程の手順の一例を示すフローチャート図。
第1実施形態における状態判定工程の手順の一例を示すフローチャート図。
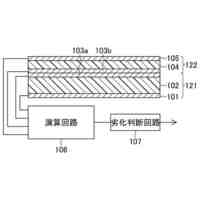
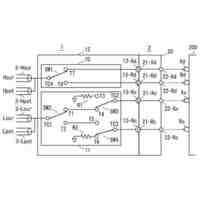
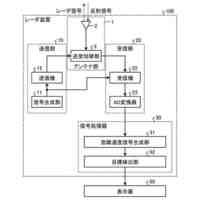
センサー、計測装置及び監視装置の構成例を示す図。
感度誤差S
e
の経時的な変化の一例を示す図。
第2実施形態における状態判定工程の手順の一例を示すフローチャート図。
第3実施形態の計測方法の手順の一例を示すフローチャート図。
第3実施形態における状態判定工程の手順の一例を示すフローチャート図。
第3実施形態における計測装置の構成例を示す図。
【発明を実施するための形態】
【0010】
以下、本発明の好適な実施形態について図面を用いて詳細に説明する。なお、以下に説明する実施の形態は、特許請求の範囲に記載された本発明の内容を不当に限定するものではない。また以下で説明される構成の全てが本発明の必須構成要件であるとは限らない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社大真空
センサ
25日前
株式会社大真空
センサ
2日前
東レ株式会社
液体展開用シート
17日前
ユニパルス株式会社
ロードセル
24日前
アズビル株式会社
湿度センサ
10日前
株式会社トプコン
植物センサ
13日前
キヤノン電子株式会社
サーボ加速度計
17日前
株式会社クボタ
作業車両
16日前
株式会社東芝
センサ
9日前
株式会社小野測器
回転計測装置
9日前
キヤノン電子株式会社
サーボ加速度計
17日前
キヤノン電子株式会社
サーボ加速度計
17日前
株式会社ミツトヨ
変位測定装置
9日前
アズビル株式会社
検査用プローブ
3日前
トヨタ自動車株式会社
異音解析方法
9日前
トヨタ自動車株式会社
画像検査装置
25日前
トヨタ自動車株式会社
NVH解析装置
9日前
キヤノン株式会社
撮像装置
9日前
株式会社大真空
センサ及びその製造方法
24日前
矢崎総業株式会社
サーミスタ
17日前
公立大学法人大阪
蛍光X線分析装置
25日前
三菱電機株式会社
振動センサ
13日前
株式会社トーキン
電流センサ
16日前
ヒロセ電機株式会社
磁気センサ装置
2日前
株式会社デンソー
電圧検出回路
16日前
株式会社デンソー
電圧検出回路
16日前
株式会社日立ハイテクサイエンス
熱分析装置
3日前
三菱電機株式会社
信号処理器及びレーダ装置
16日前
株式会社ミツトヨ
画像測定機及びプログラム
16日前
オムロン株式会社
プローブピン
13日前
トヨタ自動車株式会社
レーダ取付構造
9日前
株式会社日本マイクロニクス
プローブ
24日前
岡谷精立工業株式会社
ひずみ測定装置
25日前
株式会社日本マイクロニクス
プローブ
24日前
国立大学法人東京科学大学
サンプル測定装置
10日前
トヨタ自動車株式会社
走行経路提示システム
24日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ