TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024157999
公報種別
公開特許公報(A)
公開日
2024-11-08
出願番号
2023072745
出願日
2023-04-26
発明の名称
復帰操作を決定するための装置、方法、および、プログラム
出願人
横河電機株式会社
代理人
弁理士法人RYUKA国際特許事務所
主分類
G05B
23/02 20060101AFI20241031BHJP(制御;調整)
要約
【課題】復帰操作を決定するための装置、方法、および、プログラムを提供する。
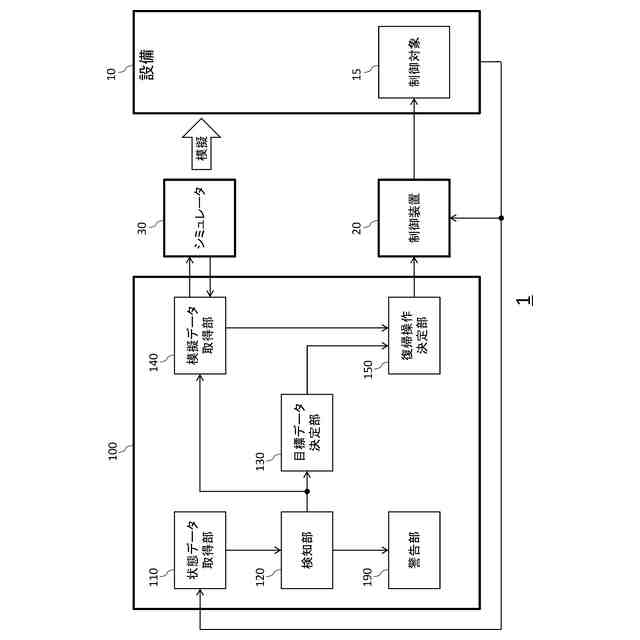
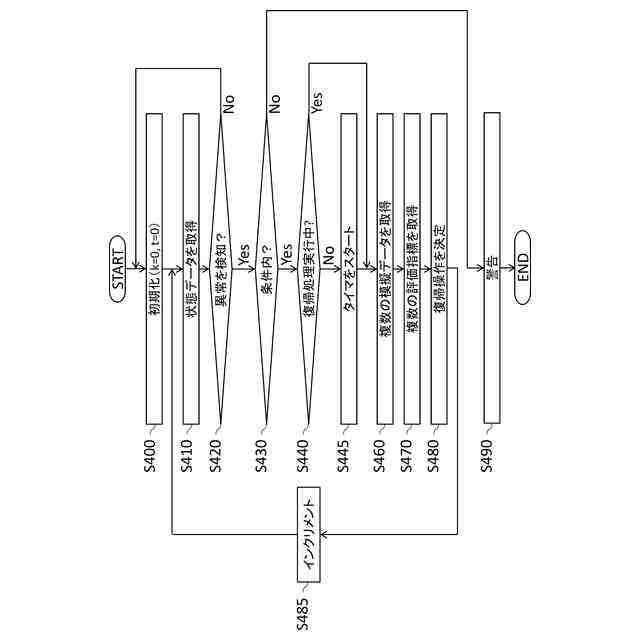
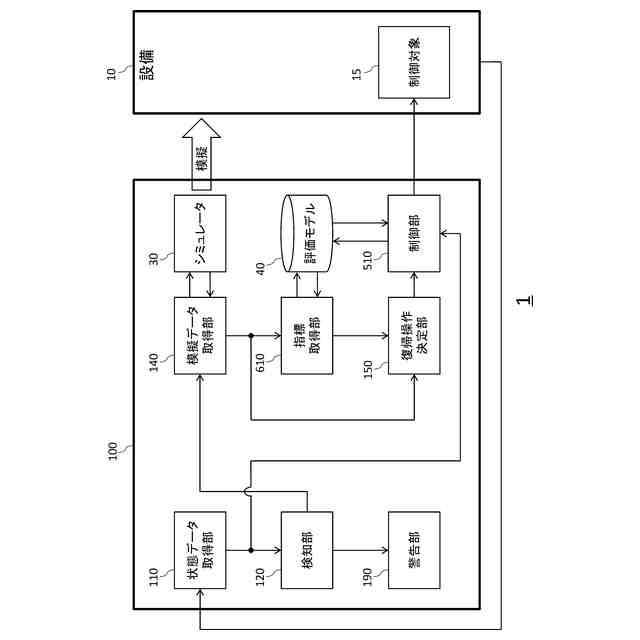
【解決手段】設備の状態を示す状態データを取得する状態データ取得部と、異常時における前記状態データを示す異常データをシミュレータに入力したことに応じて、複数の候補操作にしたがって制御対象をそれぞれ制御した場合における前記設備の状態を模擬した複数の模擬データを取得する模擬データ取得部と、前記複数の模擬データに基づいて、前記設備を異常から正常に復帰させるための復帰操作を決定する復帰操作決定部と、を備える、装置を提供する。
【選択図】図1
特許請求の範囲
【請求項1】
設備の状態を示す状態データを取得する状態データ取得部と、
異常時における前記状態データを示す異常データをシミュレータに入力したことに応じて、複数の候補操作にしたがって制御対象をそれぞれ制御した場合における前記設備の状態を模擬した複数の模擬データを取得する模擬データ取得部と、
前記複数の模擬データに基づいて、前記設備を異常から正常に復帰させるための復帰操作を決定する復帰操作決定部と、
を備える、装置。
続きを表示(約 820 文字)
【請求項2】
前記設備を異常から正常へ復帰させるために目標とする前記設備の状態を示す目標データを決定する目標データ決定部を更に備え、
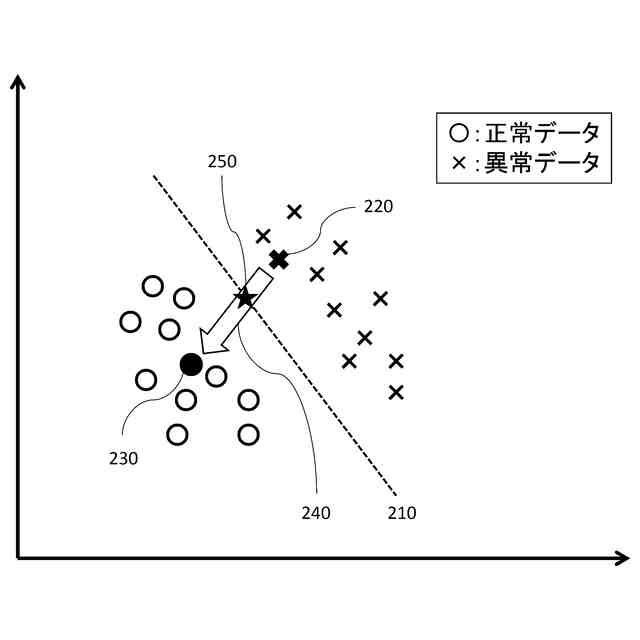
前記復帰操作決定部は、前記複数の模擬データと前記目標データとの間のそれぞれの距離に基づいて前記復帰操作を決定する、請求項1に記載の装置。
【請求項3】
前記目標データ決定部は、正常時における前記状態データを示す複数の正常データに基づいて前記目標データを決定する、請求項2に記載の装置。
【請求項4】
前記目標データ決定部は、前記複数の正常データにおける統計量に基づいて前記目標データを決定する、請求項3に記載の装置。
【請求項5】
前記目標データ決定部は、前記複数の正常データにおける時系列に基づいて前記目標データを決定する、請求項3に記載の装置。
【請求項6】
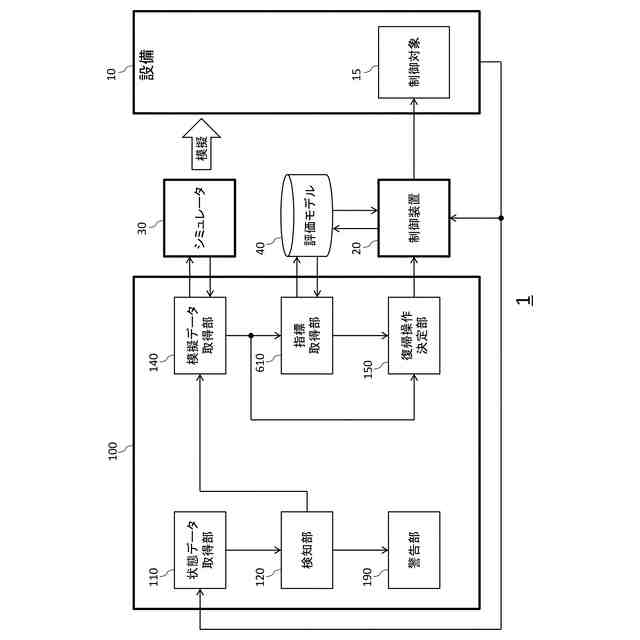
前記複数の模擬データを評価モデルに入力したことに応じて、模擬した前記設備の状態をそれぞれ評価した複数の評価指標を取得する指標取得部を更に備え、
前記復帰操作決定部は、前記複数の評価指標に基づいて前記復帰操作を決定する、請求項1に記載の装置。
【請求項7】
前記評価モデルを更に備える、請求項6に記載の装置。
【請求項8】
前記状態データに基づいて前記設備の異常を検知する検知部を更に備える、請求項1から7のいずれか一項に記載の装置。
【請求項9】
決定された前記復帰操作によっても予め定められた条件内に前記設備が異常から正常に復帰しない場合に、警告を発する警告部を更に備える、請求項1に記載の装置。
【請求項10】
前記警告部は、前記復帰操作にしたがって前記制御対象が制御された回数が予め定められた閾値を超える場合に、警告を発する、請求項9に記載の装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、復帰操作を決定するための装置、方法、および、プログラムに関する。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
特許文献1には、「プラントの異常要因を特定できるとともに、異常状態からの復帰操作をオペレータの介在なしに自動的に行えるプラント運転装置を得る。」と記載されている。
[先行技術文献]
[特許文献]
[特許文献1] 特開2014-229109号
【発明の概要】
【0003】
本発明の第1の態様においては、復帰操作を決定するための装置を提供する。前記装置は、設備の状態を示す状態データを取得する状態データ取得部と、異常時における前記状態データを示す異常データをシミュレータに入力したことに応じて、複数の候補操作にしたがって制御対象をそれぞれ制御した場合における前記設備の状態を模擬した複数の模擬データを取得する模擬データ取得部と、前記複数の模擬データに基づいて、前記設備を異常から正常に復帰させるための復帰操作を決定する復帰操作決定部と、を備える。
【0004】
前記装置は、前記設備を異常から正常へ復帰させるために目標とする前記設備の状態を示す目標データを決定する目標データ決定部を更に備え、前記復帰操作決定部は、前記複数の模擬データと前記目標データとの間のそれぞれの距離に基づいて前記復帰操作を決定してもよい。
【0005】
前記装置のいずれかにおいて、前記目標データ決定部は、正常時における前記状態データを示す複数の正常データに基づいて前記目標データを決定してもよい。
【0006】
前記装置のいずれかにおいて、前記目標データ決定部は、前記複数の正常データにおける統計量に基づいて前記目標データを決定してもよい。
【0007】
前記装置のいずれかにおいて、前記目標データ決定部は、前記複数の正常データにおける時系列に基づいて前記目標データを決定してもよい。
【0008】
前記装置のいずれかは、前記複数の模擬データを評価モデルに入力したことに応じて、模擬した前記設備の状態をそれぞれ評価した複数の評価指標を取得する指標取得部を更に備え、前記復帰操作決定部は、前記複数の評価指標に基づいて前記復帰操作を決定してもよい。
【0009】
前記装置のいずれかは、前記評価モデルを更に備えてもよい。
【0010】
前記装置のいずれかは、前記状態データに基づいて前記設備の異常を検知する検知部を更に備えてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
積水樹脂株式会社
磁性シート
26日前
個人
車両レバー操作装置
26日前
株式会社豊田自動織機
自動走行体
1か月前
株式会社豊田自動織機
無人走行体
1か月前
株式会社FUJI
工作機械
2か月前
エイブリック株式会社
基準電圧回路
1か月前
アズビル株式会社
設定システム
1か月前
エイブリック株式会社
基準電圧回路装置
29日前
株式会社熊谷組
巡回ルート作成装置
1か月前
トヨタ自動車株式会社
搬送システム
15日前
オムロン株式会社
自律作業システム
1か月前
トヨタ自動車株式会社
搬送ロボット
5日前
株式会社ダイヘン
電力変換装置
1か月前
エイブリック株式会社
シャントレギュレータ
1か月前
株式会社ダイヘン
電力変換装置
1か月前
トヨタ自動車株式会社
ロボットシステム
15日前
株式会社ダイフク
搬送設備
2か月前
エイブリック株式会社
ボルテージレギュレータ
1か月前
株式会社栗本鐵工所
操作装置
6日前
オムロン株式会社
設計装置および設計方法
1か月前
株式会社FUJI
作業機の操作表示システム
1か月前
株式会社フカデン
外周部加工システム
2か月前
株式会社ダイフク
物品搬送設備
15日前
株式会社デンソー
電子制御装置
1か月前
株式会社ダイフク
物品搬送設備
1か月前
東芝ライテック株式会社
管理システム
1か月前
日立建機株式会社
自律走行システム
2か月前
株式会社豊田自動織機
無人走行体の走行制御システム
1か月前
株式会社デンソー
移動体制御装置
2か月前
株式会社栗本鐵工所
触覚提示装置
1か月前
アズビル株式会社
診断システムおよび診断方法
1か月前
大阪瓦斯株式会社
二次圧制御機構
2か月前
大阪瓦斯株式会社
二次圧制御機構
2か月前
CKD日機電装株式会社
モデルフリーポジカスト制御
5日前
本田技研工業株式会社
運転補助装置
29日前
株式会社豊田自動織機
移動体制御システム
26日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ


































