TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024157089
公報種別
公開特許公報(A)
公開日
2024-11-07
出願番号
2023071197
出願日
2023-04-25
発明の名称
多軸機構の位置決め装置、方法及びプログラム
出願人
株式会社東芝
,
東芝エネルギーシステムズ株式会社
代理人
弁理士法人東京国際特許事務所
主分類
B25J
9/10 20060101AFI20241030BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
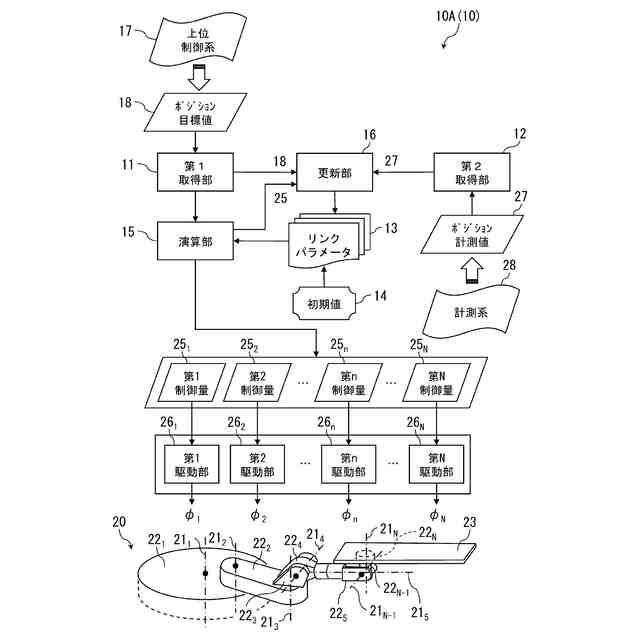
【課題】エンドエフェクタの位置の高精度な位置決めがあらゆる姿勢において達成され、調整作業も効率的に行える多軸機構の位置決め技術を提供する。
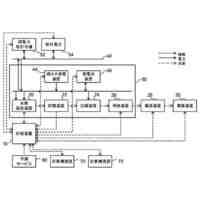
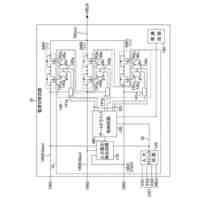
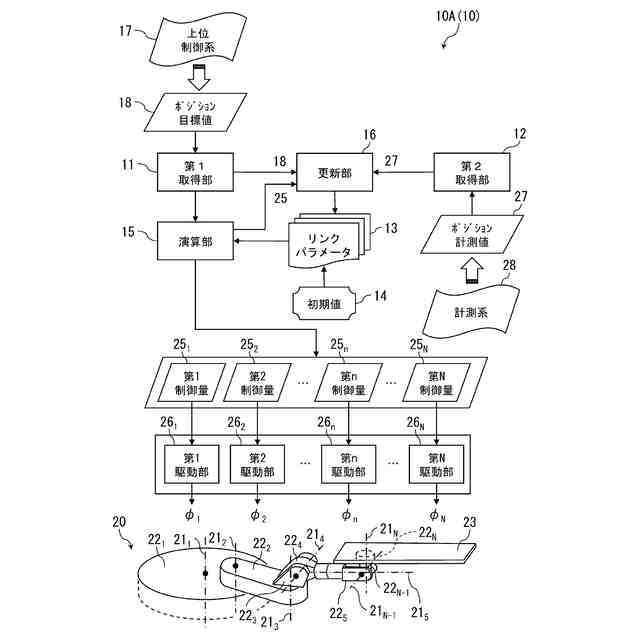
【解決手段】多軸機構20の位置決め装置10は、駆動ジョイント21
n
(n=1~N)を介して結合した複数のリンク22
n
(n=1~N)の先端に設けられたエンドエフェクタ23のポジション目標値18を取得する第1取得部11と、ポジション目標値18にエンドエフェクタ23を位置決めする駆動ジョイント21
n
(n=1~N)の各々の制御量25
n
(n=1~N)をリンクパラメータ13に基づき演算する演算部15と、位置決めされたエンドエフェクタ23のポジション計測値27を取得する第2取得部12と、ポジション計測値27がポジション目標値18に一致するようにリンクパラメータ13を更新する更新部16と、を備えている。
【選択図】図1
特許請求の範囲
【請求項1】
駆動ジョイントを介して結合した複数のリンクの先端に設けられたエンドエフェクタのポジション目標値を取得する第1取得部と、
前記ポジション目標値に前記エンドエフェクタを位置決めする前記駆動ジョイントの各々の制御量をリンクパラメータに基づき演算する演算部と、
位置決めされた前記エンドエフェクタのポジション計測値を取得する第2取得部と、
前記ポジション計測値が前記ポジション目標値に一致するように前記リンクパラメータを更新する更新部と、を備える多軸機構の位置決め装置。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載の多軸機構の位置決め装置において、
前記更新部は、異なる複数の前記ポジション目標値の各々に対応する複数の前記リンクパラメータを登録させ、
前記演算部は、取得した前記ポジション目標値に対応する前記リンクパラメータに基づき前記制御量を演算する、多軸機構の位置決め装置。
【請求項3】
請求項1に記載の多軸機構の位置決め装置において、
前記更新部は、前記ポジション目標値と対応する前記リンクパラメータとの関係を学習し、入力した前記ポジション目標値に対応する前記リンクパラメータに更新する、多軸機構の位置決め装置。
【請求項4】
請求項1から請求項3のいずれか1項に記載の多軸機構の位置決め装置において、
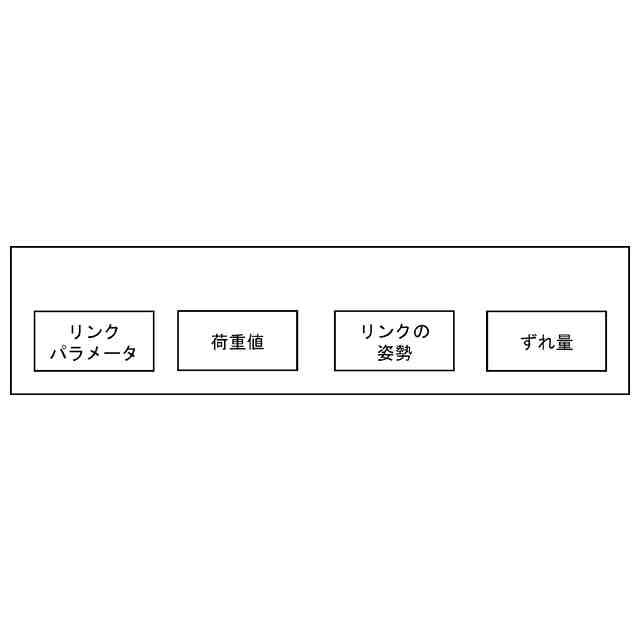
前記更新部は、複数の前記リンクの各々にかかる荷重値にも基づいて前記リンクパラメータを更新する多軸機構の位置決め装置。
【請求項5】
請求項1から請求項3のいずれか1項に記載の多軸機構の位置決め装置において、
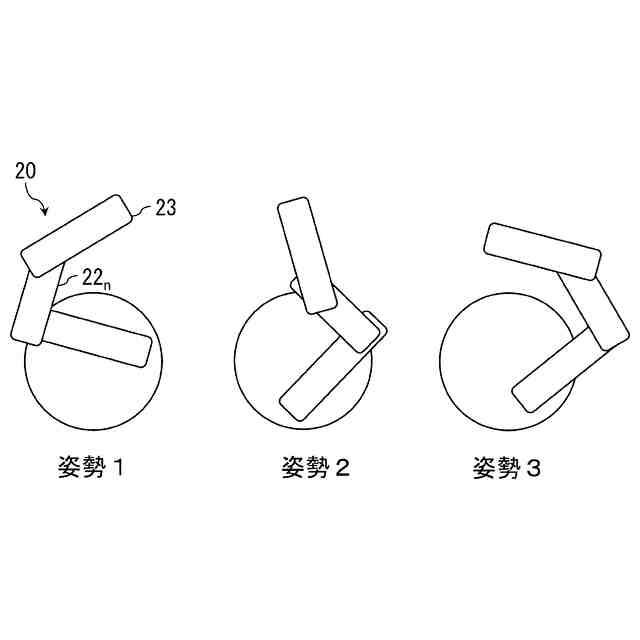
前記更新部は、複数の前記リンクがとる姿勢にも基づいて前記リンクパラメータを更新する多軸機構の位置決め装置。
【請求項6】
請求項1から請求項3のいずれか1項に記載の多軸機構の位置決め装置において、
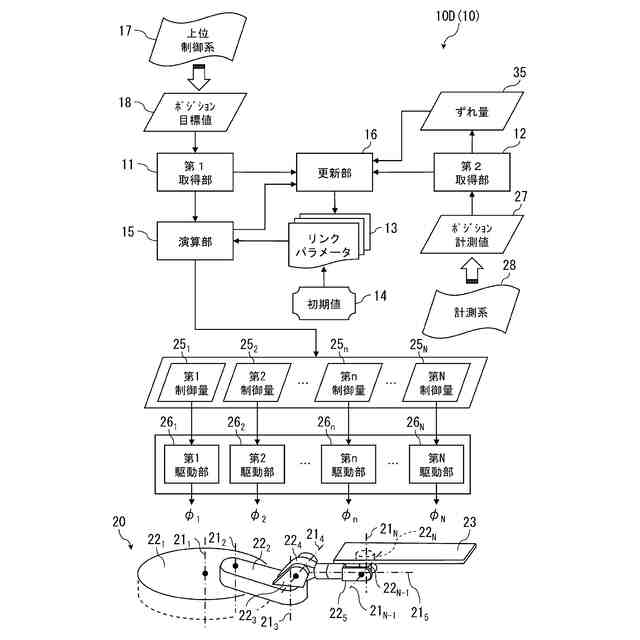
前記更新部は、外的要因により生じた前記ポジション計測値のずれ量にも基づいて前記リンクパラメータを更新する多軸機構の位置決め装置。
【請求項7】
請求項1から請求項3のいずれか1項に記載の多軸機構の位置決め装置において、
前記ポジション計測値は、前記エンドエフェクタに支持させた対象物をX線撮影したものである多軸機構の位置決め装置。
【請求項8】
駆動ジョイントを介して結合した複数のリンクの先端に設けられたエンドエフェクタのポジション目標値を取得するステップと、
前記ポジション目標値に前記エンドエフェクタを位置決めする前記駆動ジョイントの各々の制御量をリンクパラメータに基づき演算するステップと、
位置決めされた前記エンドエフェクタのポジション計測値を取得するステップと、
前記ポジション計測値が前記ポジション目標値に一致するように前記リンクパラメータを更新するステップと、を含む多軸機構の位置決め方法。
【請求項9】
コンピュータに、
駆動ジョイントを介して結合した複数のリンクの先端に設けられたエンドエフェクタのポジション目標値を取得するステップ、
前記ポジション目標値に前記エンドエフェクタを位置決めする前記駆動ジョイントの各々の制御量をリンクパラメータに基づき演算するステップ、
位置決めされた前記エンドエフェクタのポジション計測値を取得するステップ、
前記ポジション計測値が前記ポジション目標値に一致するように前記リンクパラメータを更新するステップ、を実行させる多軸機構の位置決めプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、エンドエフェクタを持つ多軸機構の位置決め技術に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
多軸機構(ロボットアーム等)のエンドエフェクタの位置決めでは、駆動ジョイント(モータ等)を介して結合するリンクの関係を表したリンクパラメータと、各々の駆動ジョイントの変位(回転角)とを用い、順運動学に基づく演算処理がなされる。
【0003】
ところで、エンドエフェクタを高精度に位置決めするためには、エンドエフェクタの位置を直接検出し、フィードバック制御することが考えられる。しかし、そのようなエンドエフェクタの位置検出が困難な場合は、リンクパラメータを高精度に決定し、オープン制御にする必要がある。このように、エンドエフェクタの位置の高精度な位置決めを達成するため、種々の制御方法が検討されている。
【先行技術文献】
【特許文献】
【0004】
特開平8-174453号公報
特開2020-39893号公報
特表2020-534051号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、多軸機構の姿勢変化に伴って自重の重心が大きく変化する場合、単一のリンクパラメータでは、たわみ量の変化分がエンドエフェクタの位置決め誤差となる。そこで、代表姿勢ごとに設定した複数のリンクパラメータを切り替える方法が検討される。しかし、別々の代表姿勢の中間を示す中間姿勢においては、適切なリンクパラメータが見当たらず、精度が十分に確保できない場合がある。
【0006】
また画像によりエンドエフェクタの位置を把握し位置合わせする制御方法では、常に画像監視による位置合わせが実行される。このため、過去に行った同一の動作を反復する場合でも、ずれ量の修正動作が毎回発生するため、動作時間の短縮が望めず仕事が非効率になる。
【0007】
さらに、地震等の外的要因で機器に物理的な変形やずれが突発的に生じた場合、ユーザが可能な範囲で調整するが、作業時間の制約のため調整時以外の姿勢で位置精度が保証されない。位置決めに要する時間の増加も懸念される。
【0008】
本発明の実施形態はこのような事情を考慮してなされたもので、エンドエフェクタの位置の高精度な位置決めがあらゆる姿勢において達成され、調整作業も効率的に行える多軸機構の位置決め技術を提供することを目的とする。
【課題を解決するための手段】
【0009】
実施形態に係る多軸機構の位置決め装置は、駆動ジョイントを介して結合した複数のリンクの先端に設けられたエンドエフェクタのポジション目標値を取得する第1取得部と、前記ポジション目標値に前記エンドエフェクタを位置決めする前記駆動ジョイントの各々の制御量をリンクパラメータに基づき演算する演算部と、位置決めされた前記エンドエフェクタのポジション計測値を取得する第2取得部と、前記ポジション計測値が前記ポジション目標値に一致するように前記リンクパラメータを更新する更新部と、を備えている。
【発明の効果】
【0010】
本発明の実施形態により、エンドエフェクタの位置の高精度な位置決めがあらゆる姿勢において達成され、調整作業も効率的に行える多軸機構の位置決め技術が提供される。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
電池
1か月前
株式会社東芝
電解装置
1か月前
株式会社東芝
除去装置
1か月前
株式会社東芝
計画装置
16日前
株式会社東芝
電源回路
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
コンデンサ
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
真空バルブ
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体回路
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
ストレージ
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
光デバイス
3日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
電力変換装置
18日前
株式会社東芝
ディスク装置
1か月前
株式会社東芝
駅務システム
17日前
株式会社東芝
ディスク装置
1か月前
株式会社東芝
ディスク装置
1か月前
株式会社東芝
駆動システム
2日前
株式会社東芝
静電保護回路
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ