TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024152382
公報種別
公開特許公報(A)
公開日
2024-10-25
出願番号
2023066537
出願日
2023-04-14
発明の名称
経路計画装置
出願人
株式会社日立製作所
代理人
弁理士法人平木国際特許事務所
主分類
G05D
1/43 20240101AFI20241018BHJP(制御;調整)
要約
【課題】大量のエージェントを効率的に移動させる経路計画をリアルタイムに算出する装置を提供する。
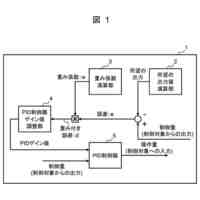
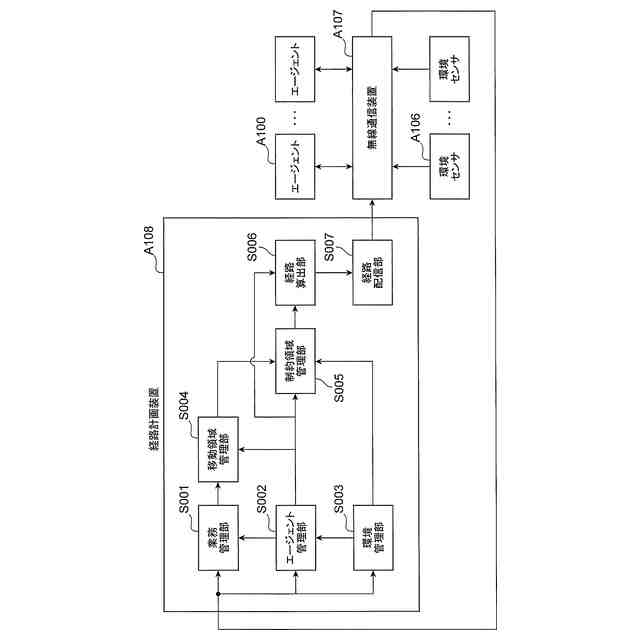
【解決手段】制御可能な移動体であるエージェントの経路を生成する経路計画装置であって、エージェントの位置情報を管理するエージェント管理部、制御不可能な非制御対象の位置情報を取得する環境管理部、エージェント管理部が取得したエージェントの位置情報に基づいて、エージェントの移動目標位置を算出する業務管理部、エージェントが移動可能な移動領域を決定し、かつ、該移動領域内の非制御対象の位置を管理する移動領域管理部、移動領域内において、該移動領域に含まれる非制御対象の個数の総和以下の制約領域を算出する制約領域管理部、移動領域内のエージェントが制約領域に侵入しないようにエージェントの移動目標位置までの経路を算出する経路算出部、及び経路算出部が算出した経路をエージェントに配信する経路配信部を有する。
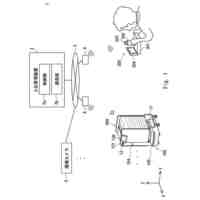
【選択図】図1
特許請求の範囲
【請求項1】
制御可能な移動体であるエージェントの経路を生成する経路計画装置であって、
前記エージェントの位置情報を管理するエージェント管理部、
制御不可能な非制御対象の位置情報を取得する環境管理部、
前記エージェント管理部が取得した前記エージェントの位置情報に基づいて、前記エージェントの移動目標位置を算出する業務管理部、
前記エージェントが移動可能な移動領域を決定し、かつ、該移動領域内の前記非制御対象の位置を管理する移動領域管理部、
前記移動領域内において、該移動領域に含まれる前記非制御対象の個数の総和以下の制約領域を算出する制約領域管理部、
前記移動領域内の前記エージェントが前記制約領域に侵入しないように前記エージェントの前記移動目標位置までの経路を算出する経路算出部、及び
前記経路算出部が算出した経路を前記エージェントに配信する経路配信部を有する、
ことを特徴とする経路計画装置。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の経路計画装置であって、
前記制約領域管理部は、前記移動領域内において、該移動領域に含まれる前記非制御対象の個数の総和以下の基底関数の線形和を用いて前記制約領域を算出する、
ことを特徴とする経路計画装置。
【請求項3】
請求項1に記載の経路計画装置であって、
前記制約領域管理部は、前記移動領域内において、該移動領域に含まれる前記非制御対象の個数の総和以下の基底関数の線形和を用いて前記制約領域を算出し、
前記経路算出部は、前記エージェントの現在位置と目標位置との間の偏差が小さくなるほど評価値が小さくなる評価関数と、前記制約領域管理部が決定した制約条件とを拘束条件として、前記評価関数が演算ごとに前回の演算値よりも小さくなるように前記エージェントの経路を算出する、
ことを特徴とする経路計画装置。
【請求項4】
請求項1に記載の経路計画装置であって、
前記制約領域管理部は、前記移動領域内において、前記エージェントの移動目標位置から現在位置までの最短経路を含まない領域を、前記移動領域に含まれる非制御対象の個数の総和以下になるように前記制約領域として算出する、
ことを特徴とする経路計画装置。
【請求項5】
請求項1に記載の経路計画装置であって、
前記制約領域管理部は、前記移動領域内において該移動領域に含まれる前記非制御対象の個数の総和以下になるように制約領域を算出し、かつ、該制約領域の候補が複数ある場合には面積が最小のものを該制約領域として算出する、
ことを特徴とする経路計画装置。
【請求項6】
請求項1に記載の経路計画装置であって、
前記制約領域管理部は、算出した制約領域内に存在する前記非制御対象が移動体を含み、該移動体が前記制約領域から逸脱した、もしくは、事前に設定された時間内に逸脱することが予想される場合に、移動後の該移動体の位置を包含するように制約領域を再計算する、
ことを特徴とする経路計画装置。
【請求項7】
請求項1に記載の経路計画装置であって、
前記制約領域管理部は、算出した制約領域内に存在する前記非制御対象が移動体を含み、該移動体が前記制約領域から逸脱し、かつ最短経路上に存在する場合に、移動後の該移動体の位置を包含するように制約領域を分割する、
ことを特徴とする経路計画装置。
【請求項8】
請求項1に記載の経路計画装置であって、
前記制約領域管理部は、前記移動領域内において、前記エージェントの移動目標位置から現在位置までの最短経路中に障害物がある場合には、該障害物を回避する領域を、前記移動領域に含まれる非制御対象の個数の総和以下になるように前記制約領域として算出する、
ことを特徴とする経路計画装置。
【請求項9】
請求項1に記載の経路計画装置であって、
前記制約領域管理部は、前記移動領域内において、該移動領域に含まれる前記非制御対象の個数の総和以下の基底関数の線形和を用いて前記制約領域を算出する際に、
(1)線形、かつ、基底関数の総和が事前に設定した許容値よりも少ない
(2)線形、かつ、基底関数の総和が事前に設定した許容値よりも多い
(3)非線形、かつ、基底関数の総和が事前に設定した許容値よりも少ない
(4)非線形、かつ、基底関数の総和が事前に設定した許容値よりも多い
の優先順位で該制約領域を算出する、
ことを特徴とする経路計画装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、複数のエージェントが存在するエリアにおける移動経路計画を生成する経路計画装置に関わる。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
物流倉庫の物品搬送や工場の工程間搬送の人手不足を解消するために、移動ロボット(AGV:
A
utomated
G
uided
V
ehicle、AMR:
A
utonomous
M
obile
R
obotなど)の導入が進んでいる。このような移動ロボットを導入するには、倉庫や工場内にロボットが移動可能な通路を設定(節点(ノード)と枝(ブランチ/エッジ)からなるグラフなどの作成)が必要になる。この設定が細かいほど、ロボットが選択可能な通路の自由度は高くなるため、より効率的な搬送が可能になる。一方で、設定作業に多くの工数が必要になる。さらに、前記の通路の設定作業は、倉庫や工場のレイアウトが変更するたびに必要になるため、詳細な通路を設定する作業は、倉庫や工場を管理する事業者に大きな負担(エンジニアリングコスト)を求めることになる。
【0003】
また、倉庫や工場では、通路上に物品が仮置きされることもあるため、正確な地図情報を取得すること自体が困難である。なお、この課題は他の産業領域でも共通になり得る。例えば、行動を走行する自動運転車両を扱う場合、道路工事による一時的な道路規制に伴い、パイロンや看板が設置されるといった環境変化が生じるため、正確な地図情報の取得は難しい。また、施工現場や鉱山などで運用される自動化建設機械(油圧ショベル、ホイールローダ、ダンプトラックなど)を扱う場合は、掘削作業に伴い、地図情報が時々刻々と変化する。
【0004】
倉庫や工場内にロボットが1台だけで動作する状況は少ないため、ロボットが、他のロボットや、倉庫や工場内で作業をする作業員と接触しないように走行制御を実行する必要がある。
【0005】
このような課題に対して、特許文献1には、詳細な通路を設計することなく、複数のロボット(特許文献1中ではビークル)が移動する経路を算出する方法が提示されている。さらに、特許文献2には、ロボット(同じく、特許文献2中ではビークル)が移動経路内に存在する障害物(他のロボットや作業員に相当)と接触しないように経路を算出する方法が示されている。
【0006】
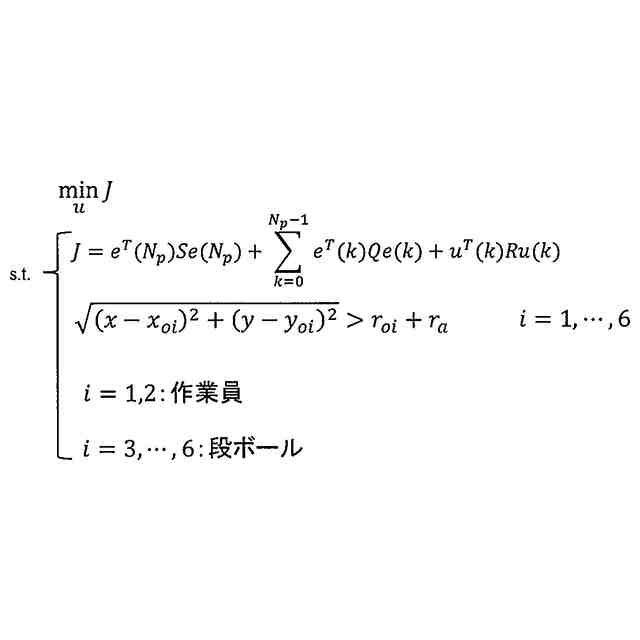
より具体的には、特許文献1では、各ロボットが障害物(建物内の柱や壁、自身以外のロボットなど)に接触せず、各ロボットの現在位置と各ロボットの目標位置をできるだけ小さくするようにモデル予測制御の考えに従って、各ロボットに対する制御入力(速度、角速度)を算出する。そして算出された制御入力を積分することで移動経路(位置、姿勢)を算出する。さらに、特許文献2では、ロボットを囲む楕円領域を定義し、この楕円領域の範囲内に障害物が侵入しないように拘束条件を与えた最適化問題を解くことで、ロボットが障害物に接触しない移動経路を算出している。
【先行技術文献】
【特許文献】
【0007】
特開2021-77090号公報
特開2022-134905号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
特許文献1によれば、事前に倉庫や工場内に詳細な通路情報を設計せずに、ロボットが目標位置にたどり着く経路を算出することができる。また、全てのロボットのダイナミクスを考慮した移動計画を時系列で算出するため、事前に対象エリアを分割し、その分割区間内に複数のロボットが入らないように制御する排他制御方式に比べて、効率的な移動計画を生成し得る。さらに、特許文献1の技術に、特許文献2の技術を組み合わせることで、対象とするロボットを、対象エリア内の他のロボット、および、障害物と接触させない経路計画を生成できると考える。
【0009】
ただし、特許文献1では、対象エリアに存在する全てのロボットをまとめたダイナミクスを利用した最適化問題を解いている。また、特許文献2でも、ロボットを囲む楕円領域と障害物の関係に対して拘束条件を導出している。このような最適化問題の定式化においては、ロボットの台数、もしくは、障害物の数が増えるにつれて、急速に計算負荷が増加することが知られている。よって、特許文献1と特許文献2の方法を大量のロボットが存在するエリアに適用しようとすると、最適化計算に膨大な時間が必要になり、ロボットの移動計画を立案することが困難になることが予想される。
【0010】
本発明は以上のような課題を解決するためになされたものであり、大量のエージェント(ロボット、ビークル、車両などの総称)を効率的に移動させる経路計画をリアルタイムに算出する装置を提供することを目的としている。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
方向検出器
7日前
ugo株式会社
移動体
7日前
トヨタ自動車株式会社
自律移動体
6日前
トヨタ自動車株式会社
搬送ロボット
20日前
トヨタ自動車株式会社
自律移動システム
6日前
トヨタ自動車株式会社
位置推定システム
6日前
株式会社栗本鐵工所
操作装置
21日前
株式会社FUJI
工作機械の操作システム
13日前
CKD日機電装株式会社
モデルフリーポジカスト制御
20日前
株式会社デンソー
ペダル装置
20日前
アルプスアルパイン株式会社
回転操作装置
7日前
オムロン株式会社
支援装置、支援方法及び支援プログラム
28日前
ローランドディー.ジー.株式会社
生産実績記録システム
28日前
村田機械株式会社
ネスティング装置、及びネスティング方法
28日前
トヨタ自動車株式会社
制御システム、制御方法、及びプログラム
28日前
株式会社日立製作所
制御装置
7日前
トヨタ自動車株式会社
制御システム、制御方法、及びプログラム
28日前
トヨタ自動車株式会社
制御システム、制御方法、及びプログラム
28日前
トヨタ自動車株式会社
制御システム、制御方法、及びプログラム
28日前
トヨタ自動車株式会社
制御システム、制御方法、及びプログラム
28日前
トヨタ自動車株式会社
制御システム、制御方法、及びプログラム
28日前
トヨタ自動車株式会社
制御システム、制御方法、及びプログラム
28日前
オムロン株式会社
制御装置およびプログラム
20日前
富士電機株式会社
異常診断装置、異常診断方法及びプログラム
28日前
富士電機株式会社
異常診断装置、異常診断方法及びプログラム
28日前
オークマ株式会社
工作機械記録システム
22日前
日清紡マイクロデバイス株式会社
半導体装置
7日前
日新電機株式会社
故障評価システム及び故障評価方法
28日前
株式会社MAZIN
情報処理装置、情報処理方法、及びプログラム
7日前
ニデックインスツルメンツ株式会社
ロボットの制御方法及び制御装置
28日前
株式会社明電舎
自律走行ロボットおよび走行経路生成方法
28日前
パナソニックIPマネジメント株式会社
ロボット
1日前
株式会社日立製作所
障害分析支援システム及び障害分析支援方法
22日前
株式会社セック
プログラム、移動体の制御方法および移動体の制御装置
20日前
学校法人早稲田大学
ロボット、ロボットの行動決定システム及びそのプログラム
7日前
東洋電機製造株式会社
プログラマブルロジックコントローラ
7日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ