TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024152281
公報種別
公開特許公報(A)
公開日
2024-10-25
出願番号
2023066387
出願日
2023-04-14
発明の名称
電動車両制御システム
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B60L
15/20 20060101AFI20241018BHJP(車両一般)
要約
【課題】加速度又は減速度の低下及び車両挙動の不安定化を抑制しながらスリップ状態を適正に解消することができる電動車両制御システムを提供する。
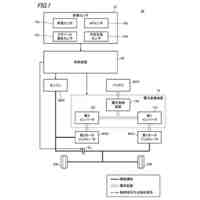
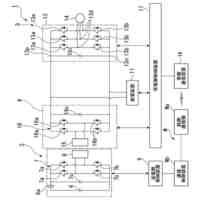
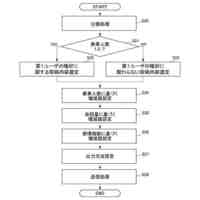
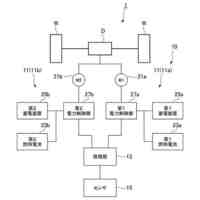
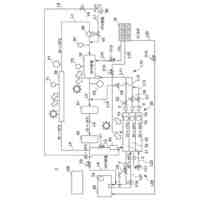
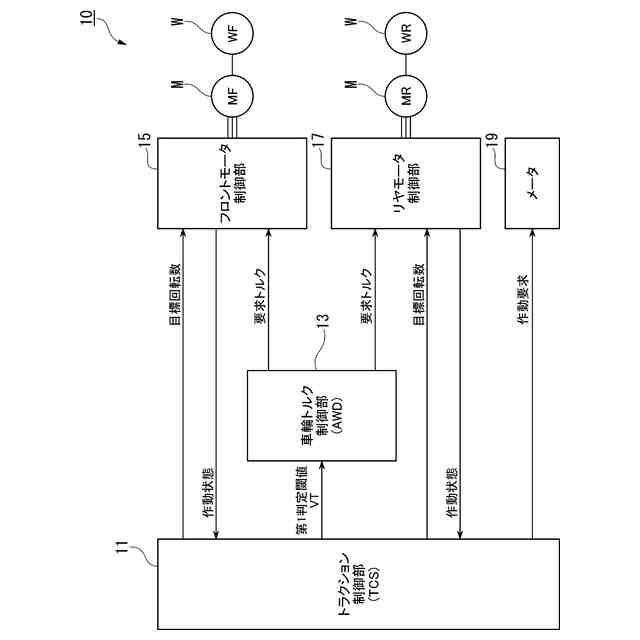
【解決手段】電動車両制御システム10は、トラクション制御部11と、車輪トルク制御部13と、フロントモータ制御部15及びリヤモータ制御部17とを備える。トラクション制御部11は、複数の車輪Wの各々のトラクションを制御する。車輪トルク制御部13は、複数の車輪Wとの間でトルクを授受する複数の回転電機Mの各々に対して要求トルクを設定することによって、複数の車輪Wの各々のトルクを制御する。フロントモータ制御部15及びリヤモータ制御部17は、フロントモータMF及びリヤモータMRの動作を制御する。複数の車輪Wの少なくともいずれか1つの空転状態に応じて、車輪トルク制御部13は、車輪トルク制御部13の動作を相対的にトラクション制御部11の動作よりも優先させる。
【選択図】図1
特許請求の範囲
【請求項1】
複数の車輪の各々のトラクションを制御する第1制御部と、
前記複数の車輪との間でトルクを授受する複数の回転電機の各々に対して要求トルクを設定することによって、前記複数の車輪の各々のトルクを制御する第2制御部と、
前記第1制御部及び前記第2制御部の各々から入力される指令に応じて、前記複数の回転電機の各々の動作を制御する複数の回転電機制御部と、
前記複数の車輪の少なくともいずれか1つの空転状態に応じて、前記第2制御部の動作を相対的に前記第1制御部の動作よりも優先させる協調制御部と
を備える
電動車両制御システム。
続きを表示(約 470 文字)
【請求項2】
前記複数の回転電機制御部の各々は、個別に、前記複数の回転電機の各々に対応して設けられる
請求項1に記載の電動車両制御システム。
【請求項3】
前記協調制御部は、
前記空転状態に対して前記第2制御部の作動要否を判定する第2判定閾値を、前記空転状態に対して前記第1制御部の作動要否を判定する第1判定閾値に応じて変更することによって、前記第2制御部の動作を相対的に前記第1制御部の動作よりも優先させる
請求項1又は請求項2に記載の電動車両制御システム。
【請求項4】
前記第1制御部は、前記複数の回転電機の各々に対して目標回転数を設定することによって、前記複数の車輪の各々のトラクションを制御し、
前記第2制御部は、運転者から要求されるトルクに応じて前記複数の車輪に分配するトルクを設定する
請求項3に記載の電動車両制御システム。
【請求項5】
前記協調制御部は、前記第2制御部である
請求項4に記載の電動車両制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電動車両制御システムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
近年、交通参加者の中でも高齢者や障がい者や子供といった脆弱な立場にある人々にも配慮した持続可能な輸送システムへのアクセスを提供する取り組みが活発化している。この実現に向けて車両の挙動安定性に関する開発を通して交通の安全性や利便性をより一層改善する研究開発に注力している。
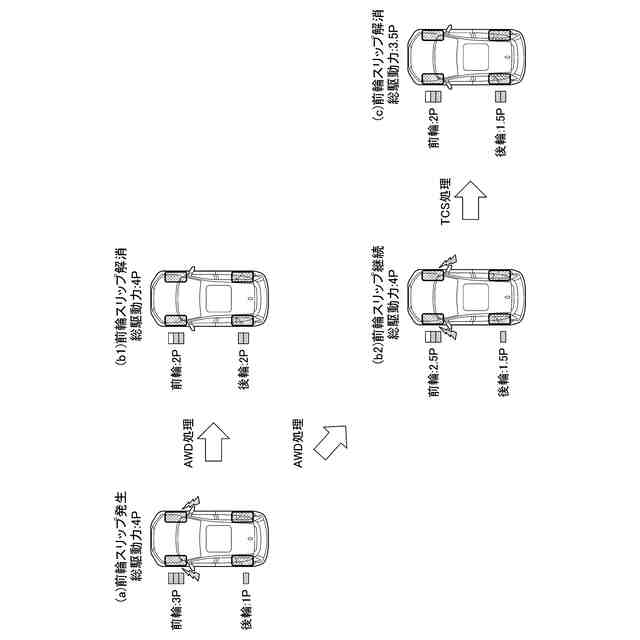
従来、要求トルクを前輪要求トルクと後輪要求トルクとに分配し、前輪と後輪とのうちスリップしている方から他方にスリップ量に応じたトルクを移動することによって前輪要求トルクと後輪要求トルクとを補正する電動車両が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2013-169818号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、車両の挙動安定性においては、加速時又は減速時に車輪のスリップが発生した場合、加速度又は減速度の低下及び車両挙動の不安定化を抑制しながらスリップ状態を解消することが課題である。
例えば上記した従来技術の電動車両は、スリップ量とトルク移動量との対応関係を示す予め作成されたマップを参照して前輪要求トルクと後輪要求トルクとを補正するので、路面状態によってはスリップを解消することができない又は車両挙動が不安定になるおそれがある。例えば、タイヤのグリップ限界は荷重と路面摩擦係数とに応じて変化するので、ウェット状態、積雪状態及び氷結状態等の摩擦係数が異なる各種の路面状態でタイヤのグリップ限界は変化する。これにより、例えば特定の路面状態を想定して作成されたマップからトルク移動量が設定されると、実際の路面状態との差異によってトルク移動量が不適正となり、スリップの未解消及び車両挙動の不安定が生じるおそれがある。
【0005】
本願は上記課題の解決のため、加速度又は減速度の低下及び車両挙動の不安定化を抑制しながらスリップ状態を適正に解消することの達成を目的としたものである。そして、延いては持続可能な輸送システムの発展に寄与するものである。
【課題を解決するための手段】
【0006】
上記課題を解決して係る目的を達成するために、本発明は以下の態様を採用した。
(1):本発明の一態様に係る電動車両制御システム(例えば、実施形態での電動車両制御システム10)は、複数の車輪(例えば、実施形態での車輪W,前輪WF,後輪WR)の各々のトラクションを制御する第1制御部(例えば、実施形態でのトラクション制御部11)と、前記複数の車輪との間でトルクを授受する複数の回転電機(例えば、実施形態での回転電機M,フロントモータMF,リヤモータMR)の各々に対して要求トルクを設定することによって、前記複数の車輪の各々のトルクを制御する第2制御部(例えば、実施形態での車輪トルク制御部13)と、前記第1制御部及び前記第2制御部の各々から入力される指令(例えば、実施形態での目標回転数、要求トルク)に応じて、前記複数の回転電機の各々の動作を制御する複数の回転電機制御部(例えば、実施形態でのフロントモータ制御部15,リヤモータ制御部17)と、前記複数の車輪の少なくともいずれか1つの空転状態に応じて、前記第2制御部の動作を相対的に前記第1制御部の動作よりも優先させる協調制御部(例えば、実施形態での車輪トルク制御部13)とを備える。
【0007】
(2):上記(1)に記載の電動車両制御システムでは、前記複数の回転電機制御部の各々は、個別に、前記複数の回転電機の各々に対応して設けられてもよい。
【0008】
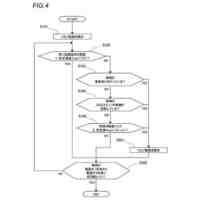
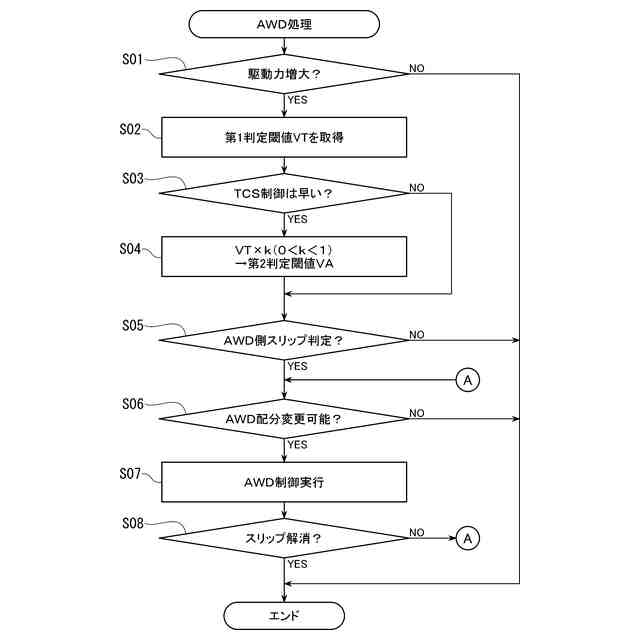
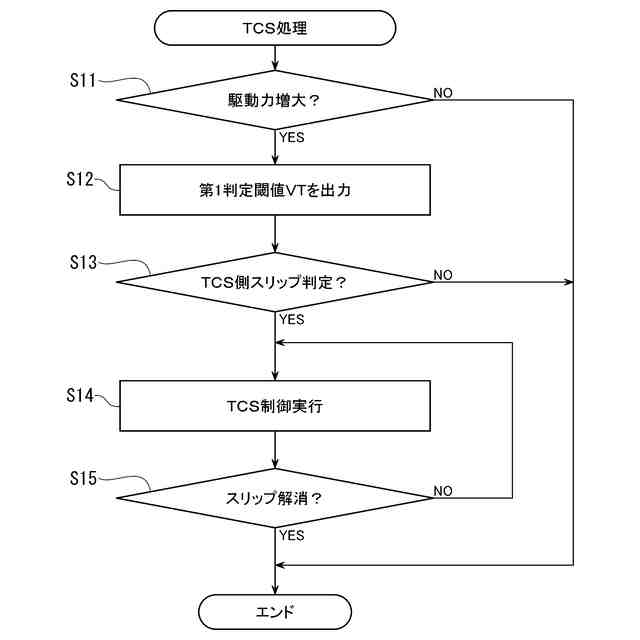
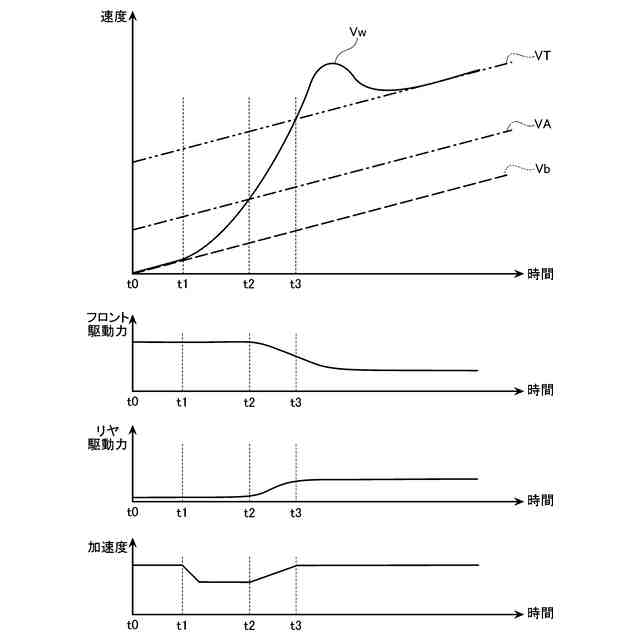
(3):上記(1)又は(2)に記載の電動車両制御システムでは、前記協調制御部は、 前記空転状態に対して前記第2制御部の作動要否を判定する第2判定閾値(例えば、実施形態での第2判定閾値VA)を、前記空転状態に対して前記第1制御部の作動要否を判定する第1判定閾値(例えば、実施形態での第1判定閾値VT)に応じて変更することによって、前記第2制御部の動作を相対的に前記第1制御部の動作よりも優先させてもよい。
【0009】
(4):上記(3)に記載の電動車両制御システムでは、前記第1制御部は、前記複数の回転電機の各々に対して目標回転数を設定することによって、前記複数の車輪の各々のトラクションを制御し、前記第2制御部は、運転者から要求されるトルクに応じて前記複数の車輪に分配するトルクを設定してもよい。
【0010】
(5):上記(4)に記載の電動車両制御システムでは、前記協調制御部は、前記第2制御部であってもよい。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
車両
16日前
本田技研工業株式会社
車両
9日前
本田技研工業株式会社
車両
2日前
本田技研工業株式会社
移動体
3日前
本田技研工業株式会社
電動車両
16日前
本田技研工業株式会社
回転電機
12日前
本田技研工業株式会社
吸着装置
9日前
本田技研工業株式会社
車両用灯体
3日前
本田技研工業株式会社
放射冷却装置
2日前
本田技研工業株式会社
鞍乗り型車両
16日前
本田技研工業株式会社
鞍乗り型車両
12日前
本田技研工業株式会社
コイルユニット
9日前
本田技研工業株式会社
燃料製造システム
12日前
本田技研工業株式会社
鞍乗り型電動車両
9日前
本田技研工業株式会社
駆動装置、及び車両
9日前
本田技研工業株式会社
駆動装置、及び車両
9日前
本田技研工業株式会社
非接触電力伝送システム
9日前
本田技研工業株式会社
プログラム及び情報管理装置
2日前
本田技研工業株式会社
鞍乗り型車両の車体前部構造
4日前
本田技研工業株式会社
プログラム及び情報管理装置
2日前
本田技研工業株式会社
車両用温調システム及び車両
4日前
本田技研工業株式会社
車両制御装置及び車両制御方法
4日前
本田技研工業株式会社
運転支援装置及び運転支援方法
16日前
本田技研工業株式会社
運転支援装置及び運転支援方法
16日前
本田技研工業株式会社
コイル分離方法及びコイル分離装置
12日前
本田技研工業株式会社
地図生成装置および地図生成システム
9日前
本田技研工業株式会社
表示制御システム、方法およびプログラム
9日前
本田技研工業株式会社
行動確率推定装置及び交通安全支援システム
11日前
本田技研工業株式会社
制御装置、水循環システム及び水温調整方法
4日前
本田技研工業株式会社
情報管理装置、情報管理方法およびプログラム
10日前
本田技研工業株式会社
運転支援装置、運転支援方法、及びプログラム
9日前
本田技研工業株式会社
運転支援装置、運転支援方法、及びプログラム
9日前
本田技研工業株式会社
車両制御装置、車両制御方法、およびプログラム
2日前
本田技研工業株式会社
大規模言語モデルのためのグラフに基づくメモリの拡張
9日前
本田技研工業株式会社
昇温システム
16日前
本田技研工業株式会社
昇温システム
16日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ