TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024147130
公報種別
公開特許公報(A)
公開日
2024-10-16
出願番号
2023059947
出願日
2023-04-03
発明の名称
モータ制御装置
出願人
ニデックインスツルメンツ株式会社
代理人
個人
主分類
H02P
29/032 20160101AFI20241008BHJP(電力の発電,変換,配電)
要約
【課題】サーボモータの動力で動作する動作対象物が障害物に衝突したときの動作対象物等の損傷を軽減することが可能であっても、動作対象物の衝突を検知した後のサーボモータの復旧作業を容易に行うことが可能となるモータ制御装置を提供する。
【解決手段】このモータ制御装置は、動作対象物の衝突を検知すると、衝突検知時のサーボモータの回転方向である衝突時モータ回転方向を記憶するとともに、サーボモータを制御しながらサーボモータを停止させ、その後、上位装置から制御指令が入力されると、制御指令に基づくサーボモータの回転方向が衝突時モータ回転方向と同方向である場合には、サーボモータの停止状態を維持し、制御指令に基づくサーボモータの回転方向が衝突時モータ回転方向と逆方向である場合には、制御指令に基づいてサーボモータを駆動する。
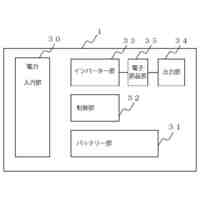
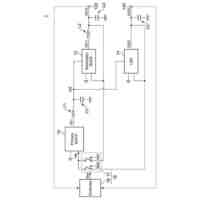
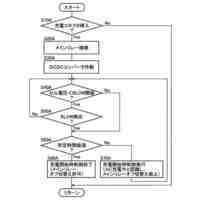
【選択図】図2
特許請求の範囲
【請求項1】
上位装置からの制御指令に基づいてサーボモータを駆動制御するモータ制御装置において、
前記サーボモータの動力で動作する動作対象物が障害物に衝突したことを検知する衝突検知機能を備え、前記動作対象物の衝突を検知すると、衝突検知時の前記サーボモータの回転方向である衝突時モータ回転方向を記憶するとともに、前記サーボモータを制御しながら前記サーボモータを停止させ、その後、前記上位装置から前記制御指令が入力されると、前記制御指令に基づく前記サーボモータの回転方向が前記衝突時モータ回転方向と同方向である場合には、前記サーボモータの停止状態を維持し、前記制御指令に基づく前記サーボモータの回転方向が前記衝突時モータ回転方向と逆方向である場合には、前記制御指令に基づいて前記サーボモータを駆動することを特徴とするモータ制御装置。
続きを表示(約 160 文字)
【請求項2】
前記動作対象物の衝突を検知すると、衝突検知信号を前記上位装置に送信することを特徴とする請求項1記載のモータ制御装置。
【請求項3】
前記動作対象物の衝突を検知すると、予め設定された減速時間で前記サーボモータを減速して停止させることを特徴とする請求項1または2記載のモータ制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、上位装置からの制御指令に基づいてサーボモータを駆動制御するモータ制御装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来、産業用ロボットや産業用機械で使用されるサーボモータを駆動制御するモータ制御装置が知られている(たとえば、特許文献1参照)。特許文献1に記載のモータ制御装置は、デジタルサーボ回路とサーボアンプとによって構成されている。デジタルサーボ回路には、上位装置である数値制御装置から共有メモリを介して制御指令が入力される。モータ制御装置は、数値制御装置から入力される制御指令に基づいてサーボモータを駆動制御する。
【0003】
特許文献1に記載のモータ制御装置は、サーボモータの動力で動作する動作対象物(被駆動体)が障害物(異物)に衝突したことを検知する衝突検知機能を備えている。このモータ制御装置は、動作対象物の衝突を検知すると、数値制御装置からの制御指令に関係なく、衝突時のサーボモータの回転方向と逆方向にサーボモータを回転させる。そのため、特許文献1に記載のモータ制御装置でサーボモータを制御すれば、動作対象物が障害物に衝突したときの動作対象物等の損傷を軽減することが可能になる。
【先行技術文献】
【特許文献】
【0004】
特開平3-3687号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載のモータ制御装置は、動作対象物の衝突を検知すると、数値制御装置からの制御指令に関係なく、衝突時のサーボモータの回転方向と逆方向にサーボモータを回転させるため、上位装置である数値制御装置は、逆方向に回転した後のサーボモータの状態を把握するのが困難になる。したがって、特許文献1に記載のモータ制御装置でサーボモータを制御すると、動作対象物の衝突を検知した後のサーボモータの復旧作業が困難になるおそれがある。
【0006】
そこで、本発明の課題は、サーボモータの動力で動作する動作対象物が障害物に衝突したときの動作対象物等の損傷を軽減することが可能であっても、動作対象物の衝突を検知した後のサーボモータの復旧作業を容易に行うことが可能となるモータ制御装置を提供することにある。
【課題を解決するための手段】
【0007】
上記の課題を解決するため、本発明のモータ制御装置は、上位装置からの制御指令に基づいてサーボモータを駆動制御するモータ制御装置において、サーボモータの動力で動作する動作対象物が障害物に衝突したことを検知する衝突検知機能を備え、動作対象物の衝突を検知すると、衝突検知時のサーボモータの回転方向である衝突時モータ回転方向を記憶するとともに、サーボモータを制御しながらサーボモータを停止させ、その後、上位装置から制御指令が入力されると、制御指令に基づくサーボモータの回転方向が衝突時モータ回転方向と同方向である場合には、サーボモータの停止状態を維持し、制御指令に基づくサーボモータの回転方向が衝突時モータ回転方向と逆方向である場合には、制御指令に基づいてサーボモータを駆動することを特徴とする。
【0008】
本発明のモータ制御装置は、動作対象物の衝突を検知すると、サーボモータを制御しながらサーボモータを停止させている。また、本発明のモータ制御装置は、サーボモータを停止させた後、上位装置から入力される制御指令に基づくサーボモータの回転方向が衝突時のサーボモータの回転方向である衝突時モータ回転方向と逆方向である場合には、制御指令に基づいてサーボモータを駆動する一方で、上位装置から入力される制御指令に基づくサーボモータの回転方向が衝突時モータ回転方向と同方向である場合には、サーボモータの停止状態を維持している。そのため、本発明では、停止しているサーボモータは、動作対象物が障害物から離れる方向のみに回転する。したがって、本発明のモータ制御装置でサーボモータを制御すれば、動作対象物が障害物に衝突したときの動作対象物等の損傷を軽減することが可能になる。
【0009】
また、本発明のモータ制御装置は、サーボモータを停止させた後、上位装置から入力される制御指令に基づくサーボモータの回転方向が衝突時モータ回転方向と逆方向である場合に、制御指令に基づいてサーボモータを駆動している。すなわち、本発明のモータ制御装置は、上位装置からの制御指令に基づいてサーボモータを逆方向に回転させている。そのため、本発明では、上位装置は、逆方向に回転した後のサーボモータの状態を把握しやすくなる。したがって、本発明のモータ制御装置でサーボモータを制御すれば、動作対象物の衝突を検知した後のサーボモータの復旧作業を容易に行うことが可能になる。すなわち、本発明のモータ制御装置でサーボモータを制御すれば、動作対象物が障害物に衝突したときの動作対象物等の損傷を軽減することが可能であっても、動作対象物の衝突を検知した後のサーボモータの復旧作業を容易に行うことが可能になる。
【0010】
本発明において、モータ制御装置は、動作対象物の衝突を検知すると、衝突検知信号を上位装置に送信することが好ましい。このように構成すると、上位装置は、動作対象物の衝突が発生していることを認識することが可能になる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社発明屋
光起電システム
7日前
株式会社アイシン
回転電機
15日前
個人
配電盤設置方法
13日前
株式会社発明ラボックス
蓄電電池
18日前
ニデック株式会社
ステータ
7日前
中国電力株式会社
接地線穴カバー
13日前
三菱電機株式会社
駆動回路
4日前
新電元工業株式会社
絶縁電源
12日前
株式会社アイドゥス企画
連結ドラムモータ
11日前
ローム株式会社
複合電源回路
11日前
住友電装株式会社
ブラケット
6日前
三菱電機モビリティ株式会社
電力変換装置
4日前
株式会社カネカ
独立システム
12日前
新電元工業株式会社
電源装置
12日前
富士電機株式会社
電力変換装置
12日前
株式会社ダイヘン
電力供給装置
5日前
株式会社豊田自動織機
電子機器
7日前
株式会社東光通商
熱電発電装置
11日前
株式会社デンソー
リニアモータ
7日前
株式会社ダイヘン
電力変換装置
5日前
株式会社豊田自動織機
回転電機
18日前
トヨタ自動車株式会社
電動車両
15日前
株式会社NTTドコモ
中継装置
18日前
株式会社NTTドコモ
中継装置
18日前
未来工業株式会社
配線ボックス
15日前
エイブリック株式会社
DC-DCコンバータ
15日前
オムロン株式会社
電力変換装置
4日前
株式会社豊田自動織機
電動圧縮機
13日前
株式会社村田製作所
電力制御装置
18日前
国立大学法人 長崎大学
発電装置
18日前
株式会社アイシン
電源装置
12日前
ミネベアミツミ株式会社
ステータ組立体
4日前
ミツミ電機株式会社
直流電源装置
12日前
日本精工株式会社
接続装置
13日前
株式会社アイシン
ステータ
15日前
矢崎総業株式会社
グロメット
6日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ