TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024128670
公報種別
公開特許公報(A)
公開日
2024-09-24
出願番号
2023037780
出願日
2023-03-10
発明の名称
車両制御装置、車両制御用コンピュータプログラム及び車両制御方法
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
50/10 20120101AFI20240913BHJP(車両一般)
要約
【課題】自車両を他車両の死角領域の外へ移動する移動制御を行っている時に、ドライバが自車両の速度制御に対して違和感を覚えることを低減する車両制御装置を提供する。
【解決手段】車両制御装置は、自車両の周辺環境を表す情報に基づいて、自車両が他車両の死角領域に位置しているか否かを判定する第1判定部と、自車両が他車両の死角領域に位置していると判定された場合、自車両の速度を所定の方向に変化させることにより自車両を他車両の死角領域の外へ移動させる移動制御を開始することを決定する第1決定部と、移動制御の実行中に、自車両のドライバの動作を表す情報に基づいて、所定の方向とは反対の向きに、ドライバによって自車両の速度を変化させる操作が実行されたか否かを判定する第2判定部と、ドライバによって自車両の速度を変化させる操作が実行されたと判定された場合、移動制御を終了することを決定する第2決定部と、を有する。
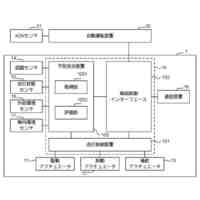
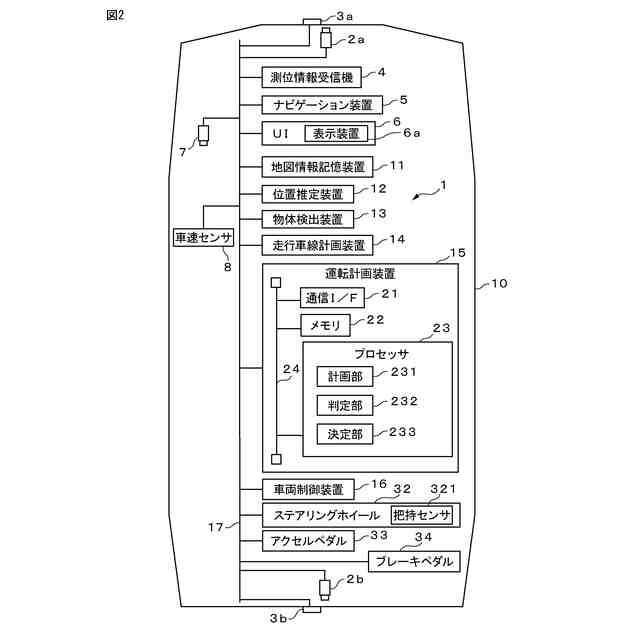
【選択図】図2
特許請求の範囲
【請求項1】
自車両の周辺環境を表す情報に基づいて、自車両が他車両の死角領域に位置しているか否かを判定する第1判定部と、
前記第1判定部によって自車両が他車両の死角領域に位置していると判定された場合、自車両の速度を所定の方向に変化させることにより自車両を他車両の死角領域から当該死角領域の外へ移動させる移動制御を開始することを決定する第1決定部と、
前記第1決定部によって開始することが決定された前記移動制御の実行中に、自車両のドライバの動作を表す情報に基づいて、前記所定の方向とは反対の向きに、前記ドライバによって自車両の速度を変化させる操作が実行されたか否かを判定する第2判定部と、
前記第2判定部によって、前記ドライバによって自車両の速度を変化させる前記操作が実行されたと判定された場合、前記移動制御を終了することを決定する第2決定部と、
を有する、ことを特徴とする車両制御装置。
続きを表示(約 1,300 文字)
【請求項2】
前記第2判定部によって前記ドライバによって自車両の速度を変化させる前記操作が実行されたと判定された場合、前記ドライバの操作により自車両の速度を変化させて自車両が他車両の死角領域から当該死角領域の外へ移動した時に、自車両が走行する車線上を走行する第2の他車両と自車両との間に所定の車間距離を維持できるか否かを判定する第3判定部を有し、
前記第3判定部によって、第2の他車両と自車両との間に前記所定の車間距離を維持できないと判定された場合、前記第2決定部は、前記移動制御を終了せずに継続することを決定する、請求項1に記載の車両制御装置。
【請求項3】
前記第2判定部は、前記所定の方向とは反対の向きに、前記ドライバによって自車両の速度を設定する操作が実行された場合、前記ドライバによって自車両の速度を変化させる操作が実行されたと判定する、請求項1に記載の車両制御装置。
【請求項4】
前記第2判定部は、前記ドライバがステアリングホイールを把持するか、又は、速度表示部を注視しており、且つ、前記所定の方向とは反対の向きに、前記ドライバによって自車両の速度を設定する操作が実行された場合、前記ドライバによって自車両の速度を変化させる操作が実行されたと判定する、請求項3に記載の車両制御装置。
【請求項5】
自車両の周辺環境を表す情報に基づいて、自車両が他車両の死角領域に位置しているか否かを判定し、
自車両が他車両の死角領域に位置していると判定された場合、自車両の速度を所定の方向に変化させることにより自車両を他車両の死角領域から当該死角領域の外へ移動させる移動制御を開始することを決定し、
前記移動制御の実行中に、自車両のドライバの動作を表す情報に基づいて、前記所定の方向とは反対の向きに、前記ドライバによって自車両の速度を変化させる操作が実行されたか否かを判定し、
前記ドライバによって自車両の速度を変化させる前記操作が実行されたと判定された場合、前記移動制御を終了する、
ことを含む処理をプロセッサに実行させる、ことを特徴とする車両制御用コンピュータプログラム。
【請求項6】
車両制御装置が、
自車両の周辺環境を表す情報に基づいて、自車両が他車両の死角領域に位置しているか否かを判定し、
自車両が他車両の死角領域に位置していると判定された場合、自車両の速度を所定の方向に変化させることにより自車両を他車両の死角領域から当該死角領域の外へ移動させる移動制御を開始することを決定し、
前記移動制御の実行中に、自車両のドライバの動作を表す情報に基づいて、前記所定の方向とは反対の向きに、前記ドライバによって自車両の速度を変化させる操作が実行されたか否かを判定し、
前記ドライバによって自車両の速度を変化させる前記操作が実行されたと判定された場合、前記移動制御を終了する、
ことを実行する、ことを特徴とする車両制御用コンピュータプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両制御装置、車両制御用コンピュータプログラム及び車両制御方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
車両に搭載される自動制御システムは、自車両の現在位置と、自車両の目的位置と、ナビゲーション用地図とに基づいて、自車両のナビルートを生成する。自動制御システムは、地図情報を用いて自車両の現在位置を推定し、自車両をナビルートに沿って走行するように制御する。
【0003】
自動制御システムは、自車両と他車両との間に安全な距離が維持されるように、車両の走行を制御する。例えば、自動制御システムは、自車両の速度を制御して、自車両と他車両との間に安全な距離を維持する。
【0004】
また、自動制御システムは、自車両が隣接車線を走行する他車両の死角領域に位置していると判定した場合、自車両を減速又は加速することにより、死角領域から死角領域の外へ移動するように自車両を制御する。これにより、自動制御システムは、他車両から認識され難い死角領域から自車両を移動させて、自車両の安全を図る(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
特開平03-251783号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
例えば、自動制御システムが、自車両を他車両の死角領域からこの死角領域の外へ移動するために自車両を減速したとする。しかし、ドライバは他車両の前に出たいと考えていた場合には、自車両の速度制御に違和感を覚えて、自動制御システムによる速度制御とは反対に加速しようと操作する場合があった。
【0007】
この場合、自動制御システムによる自車両の速度制御とは反対にドライバが速度を操作しようとしていても、自動制御システムが死角領域の外へ移動するための速度制御を続けるという問題があった。
【0008】
そこで、本開示は、自車両を他車両の死角領域から死角領域の外へ移動する移動制御を行っている時に、ドライバが自車両の速度制御に対して違和感を覚えることを低減する車両制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
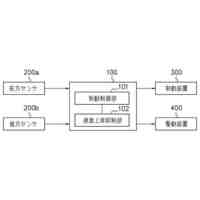
(1)一の実施形態によれば、車両制御装置が提供される。この車両制御装置は、自車両の周辺環境を表す情報に基づいて、自車両が他車両の死角領域に位置しているか否かを判定する第1判定部と、第1判定部によって自車両が他車両の死角領域に位置していると判定された場合、自車両の速度を所定の方向に変化させることにより自車両を他車両の死角領域から当該死角領域の外へ移動させる移動制御を開始することを決定する第1決定部と、第1決定部によって開始することが決定された移動制御の実行中に、自車両のドライバの動作を表す情報に基づいて、所定の方向とは反対の向きに、ドライバによって自車両の速度を変化させる操作が実行されたか否かを判定する第2判定部と、第2判定部によって、ドライバによって自車両の速度を変化させる操作が実行されたと判定された場合、移動制御を終了することを決定する第2決定部と、を有する、ことを特徴とする。
【0010】
(2)(1)の車両制御装置において、第2判定部によってドライバによって自車両の速度を変化させる操作が実行されたと判定された場合、ドライバの操作により自車両の速度を変化させて自車両が他車両の死角領域から当該死角領域の外へ移動した時に、自車両が走行する車線上を走行する第2の他車両と自車両との間に所定の車間距離を維持できるか否かを判定する第3判定部を有し、第3判定部によって、第2の他車両と自車両との間に所定の車間距離を維持できないと判定された場合、第2決定部は、移動制御を終了せずに継続することを決定することが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
電池交換式自動車
1か月前
東レ株式会社
車両用エアバッグ
9日前
個人
連結式、キャンピングカー
1か月前
日本精機株式会社
運転支援装置
26日前
個人
移動手段のミラーカバー。
2か月前
日本精機株式会社
表示システム
27日前
ダイハツ工業株式会社
レバー
1か月前
豊田合成株式会社
車両
9日前
豊田合成株式会社
車両
9日前
スズキ株式会社
車両制御装置
1か月前
三菱マヒンドラ農機株式会社
作業車両
1か月前
個人
ブレーキ踏み間違い救済システム
9日前
ダイハツ工業株式会社
搭載構造
2日前
ダイハツ工業株式会社
搭載構造
2日前
株式会社小糸製作所
車両用灯具
2か月前
ダイハツ工業株式会社
分解構造
1か月前
豊田合成株式会社
乗員保護装置
5日前
株式会社デンソー
清掃装置
26日前
個人
加速抑制機能付アクセルペダル装置
23日前
加藤電機株式会社
車両用警報装置
1か月前
トヨタ自動車株式会社
車両
20日前
トヨタ自動車株式会社
車両
20日前
トヨタ自動車株式会社
車両
20日前
トヨタ自動車株式会社
車両
20日前
トヨタ自動車株式会社
車両
20日前
ダイハツ工業株式会社
ドア防水構造
9日前
豊田合成株式会社
ガラスラン
1か月前
株式会社SUBARU
配光制御装置
1か月前
株式会社ニフコ
物品保持装置
1か月前
日本プラスト株式会社
内装材
5日前
株式会社ニフコ
物品保持装置
1か月前
豊田合成株式会社
ガラスラン
9日前
トヨタ自動車株式会社
車両制御装置
27日前
ダイハツ工業株式会社
ドアトリム構造
2か月前
トヨタ自動車株式会社
電動車両
1か月前
マツダ株式会社
車両用駆動装置
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ