TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024126319
公報種別
公開特許公報(A)
公開日
2024-09-20
出願番号
2023034621
出願日
2023-03-07
発明の名称
走行制御装置および走行制御装置用のプログラム
出願人
株式会社デンソー
代理人
弁理士法人ゆうあい特許事務所
主分類
B60W
30/16 20200101AFI20240912BHJP(車両一般)
要約
【課題】車速と車間距離に関する制御を行う走行制御装置において、車速制御と車間距離制御の切り替わりに起因して発生する追従性の悪化を抑制する。
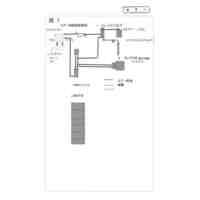
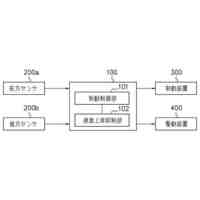
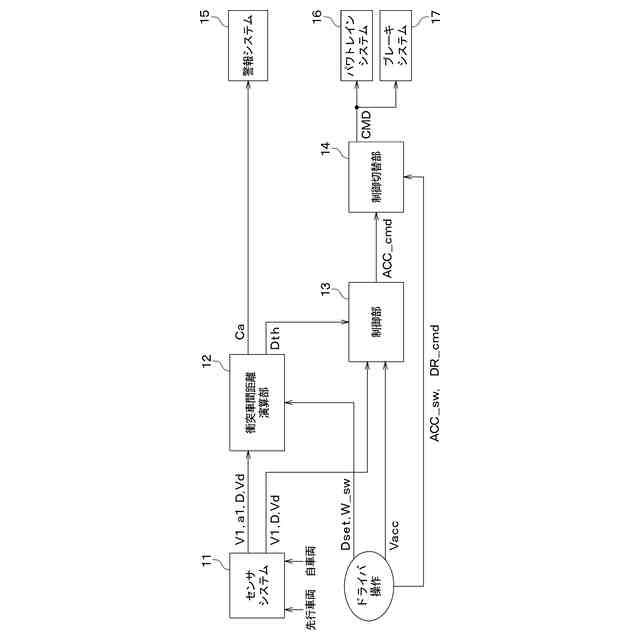
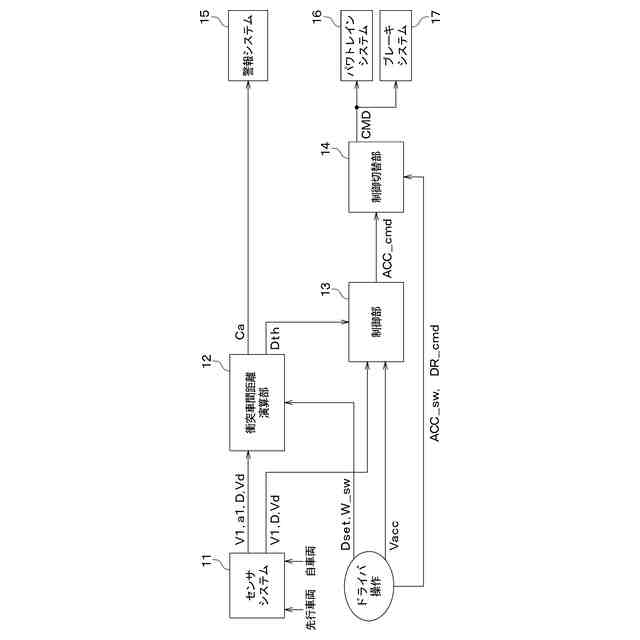
【解決手段】衝突車間距離演算部12は、自車両から先行車両までの車間距離Dに基づいた指標である衝突車間距離Dthを算出する。制御部13は、衝突車間距離Dthに関する条件を制約条件としながら、定められた設定速度Vaccに自車両の走行速度を追従させる最適制御により、車両の加減速に関する指示量ACC_cmdを決定し、パワトレインシステム16、ブレーキシステム17に届くよう、当該指示量ACC_cmdを出力する。
【選択図】図1
特許請求の範囲
【請求項1】
車両の走行制御装置であって、
前記車両から前記車両の前方を走行する先行車両までの車間距離(D)に基づいた指標である衝突車間距離(Dth)を算出する衝突車間距離演算部(12)と、
前記衝突車間距離に関する条件を制約条件としながら、定められた設定速度(Vacc)に前記車両の走行速度を追従させる最適制御により、前記車両の加減速に関する指示量(ACC_cmd)を決定すると共に、前記車両の駆動力および制動力を発生させるシステム(16、17)に届くよう、前記指示量を出力する制御部(13)と、を備えた走行制御装置。
続きを表示(約 840 文字)
【請求項2】
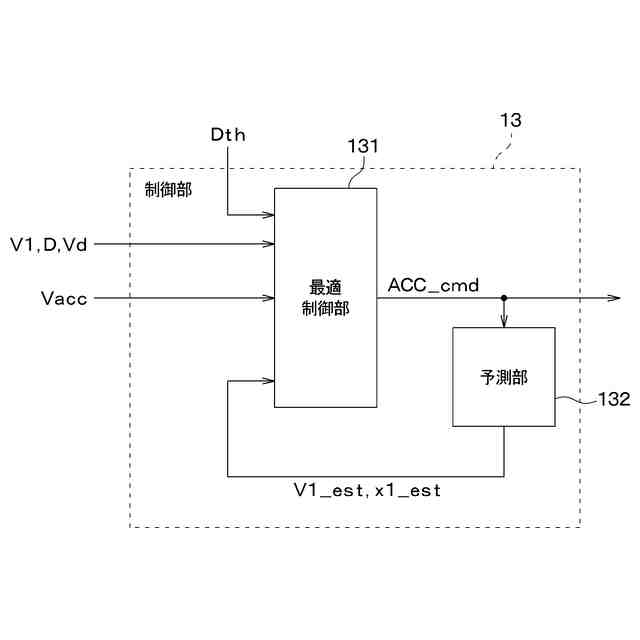
前記制御部は、前記衝突車間距離に基づく前記条件を前記制約条件としながら前記設定速度に前記車両の走行速度を追従させる前記最適制御により前記指示量を決定する最適制御部(131)と、前記指示量に基づいて前記車両の走行速度を予測する予測部(132)とを備え、
前記最適制御部は、前記予測部が予測した前記車両の走行速度を含めた前記最適制御を行う、請求項1に記載の走行制御装置。
【請求項3】
前記衝突車間距離演算部は、前記車間距離が大きくなるほど前記衝突車間距離を大きくする量と、前記車両の制動距離が大きくなるほど前記衝突車間距離を小さくする量と、前記先行車両の制動距離が大きくなるほど前記衝突車間距離を大きくする量を含むよう、前記衝突車間距離を算出し、
前記制御部は、前記制約条件として、前記衝突車間距離が基準距離(L)より大きいという条件を用いる、請求項1に記載の走行制御装置。
【請求項4】
前記衝突車間距離演算部は、ドライバの設定操作によって定められる余裕度(Dset)を含むよう、前記衝突車間距離を算出し、前記余裕度は、大きくなるほど前記衝突車間距離を小さくする量である、請求項3に記載の走行制御装置。
【請求項5】
車両の走行制御装置に用いるプログラムであって、前記走行制御装置を、
前記車両から前記車両の前方を走行する先行車両までの車間距離(D)に基づいた指標である衝突車間距離(Dth)を算出する衝突車間距離演算部(12)、および、
前記衝突車間距離に関する条件を制約条件としながら、定められた設定速度(Vacc)に前記車両の走行速度を追従させる最適制御により、前記車両の加減速に関する指示量(ACC_cmd)を決定すると共に、前記車両の駆動力および制動力を発生させるシステム(16、17)に決定した前記指示量が届くよう出力する制御部(13)として機能させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の走行制御装置および走行制御装置用のプログラムに関するものである。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、車両の走行を制御する手法としては、当該車両の車速を所定の値に追従させる車速制御と、当該車両から先行車両までの車間距離を安全な範囲に維持させる車間距離制御が、知られている。例えば、非特許文献1には、車間距離制御を行うPID制御器と車速制御を行うPID制御器を有し、車間距離制御を優先するか速度制御を優先にするかを逐次切り替える技術が記載されている。
【先行技術文献】
【非特許文献】
【0003】
安達、金井、越智、“車間制御システムへの二自由度制御手法の応用”、計測と制御第44巻第7号、2005年7月号、第504頁-第509頁
【発明の概要】
【発明が解決しようとする課題】
【0004】
発明者の検討によれば、非特許文献1のような技術は、制御が切り替わるタイミングで切り替わり後の制御目標となる車速または車間距離に対する追従性が悪くなり、当該車両のドライバに違和感や不安を与える場合がある。
【0005】
本発明は上記点に鑑み、車速と車間距離に関する制御を行う走行制御装置において、車速制御と車間距離制御の切り替わりに起因して発生する追従性の悪化を抑制することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するための請求項1に記載の発明は、
車両の走行制御装置であって、
前記車両から前記車両の前方を走行する先行車両までの車間距離(D)に基づいた指標である衝突車間距離(Dth)を算出する衝突車間距離演算部(12)と、
前記衝突車間距離に関する条件を制約条件としながら、定められた設定速度(Vacc)に前記車両の走行速度を追従させる最適制御により、前記車両の加減速に関する指示量(ACC_cmd)を決定すると共に、前記車両の駆動力および制動力を発生させるシステム(16、17)に決定した前記指示量が届くよう出力する制御部(13)と、を備えた走行制御装置である。
【0007】
また、請求項5に記載の発明は、
車両の走行制御装置に用いるプログラムであって、前記走行制御装置を、
前記車両から前記車両の前方を走行する先行車両までの車間距離(D)に基づいた指標である衝突車間距離(Dth)を算出する衝突車間距離演算部(12)、および、
前記衝突車間距離に関する条件を制約条件としながら、定められた設定速度(Vacc)に前記車両の走行速度を追従させる最適制御により、前記車両の加減速に関する指示量(ACC_cmd)を決定すると共に、前記車両の駆動力および制動力を発生させるシステム(16、17)に決定した前記指示量が届くよう出力する制御部(13)として機能させるプログラムである。
【0008】
このように、車間制御と車速制御を別々のPID制御器で取り扱って切り替えを行うのでなく、衝突車間距離に関する条件を制約条件として設定速度に車速を追従させる最適制御を行うことで、車間制御と車速制御を切り替える必要がなくなり、ひいては、車速制御と車間距離制御の切り替わりに起因して発生する追従性の悪化を抑制することができる。
【0009】
なお、各構成要素等に付された括弧付きの参照符号は、その構成要素等と後述する実施形態に記載の具体的な構成要素等との対応関係の一例を示すものである。
【図面の簡単な説明】
【0010】
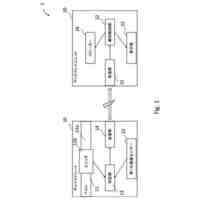
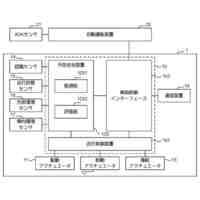
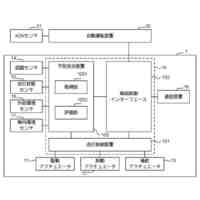
車載システムの構成図である。
制御部の構成を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
車両用エアー傘
2か月前
個人
電池交換式自動車
1か月前
個人
自動車盗難防止装置
2か月前
個人
移動手段のミラーカバー。
1か月前
東レ株式会社
車両用エアバッグ
今日
個人
連結式、キャンピングカー
1か月前
日本精機株式会社
表示システム
18日前
日本精機株式会社
運転支援装置
17日前
個人
車両の座席装置
2か月前
スズキ株式会社
車両制御装置
28日前
日本化薬株式会社
ガス発生器
1か月前
ダイハツ工業株式会社
レバー
1か月前
個人
セパレート型キャンピングカー
2か月前
豊田合成株式会社
車両
今日
豊田合成株式会社
車両
今日
アピオ株式会社
荷物用支持具
1か月前
ダイハツ工業株式会社
分解構造
1か月前
株式会社小糸製作所
車両用灯具
1か月前
株式会社JVCケンウッド
車両
2か月前
個人
ブレーキ踏み間違い救済システム
今日
三菱マヒンドラ農機株式会社
作業車両
1か月前
豊田合成株式会社
歩行者保護装置
1か月前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
車両
1か月前
日本精機株式会社
シート用振動伝達装置
2か月前
株式会社JVCケンウッド
移動体
2か月前
豊田合成株式会社
歩行者保護装置
1か月前
株式会社SUBARU
車両用ドア
1か月前
株式会社デンソー
清掃装置
17日前
加藤電機株式会社
車両用警報装置
1か月前
トヨタ自動車株式会社
車両
11日前
個人
加速抑制機能付アクセルペダル装置
14日前
トヨタ自動車株式会社
車両
11日前
豊田合成株式会社
歩行者保護装置
2か月前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
車両
11日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ