TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024125648
公報種別
公開特許公報(A)
公開日
2024-09-19
出願番号
2023033598
出願日
2023-03-06
発明の名称
故障時期学習・推定システム、方法、及び、プログラム
出願人
三菱電機株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
19/06 20060101AFI20240911BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業員の原因分析にかかる工数を削減するとともに、最適なオーバーホール時期を推定することができる故障時期学習・推定システムを提供することを目的とする。
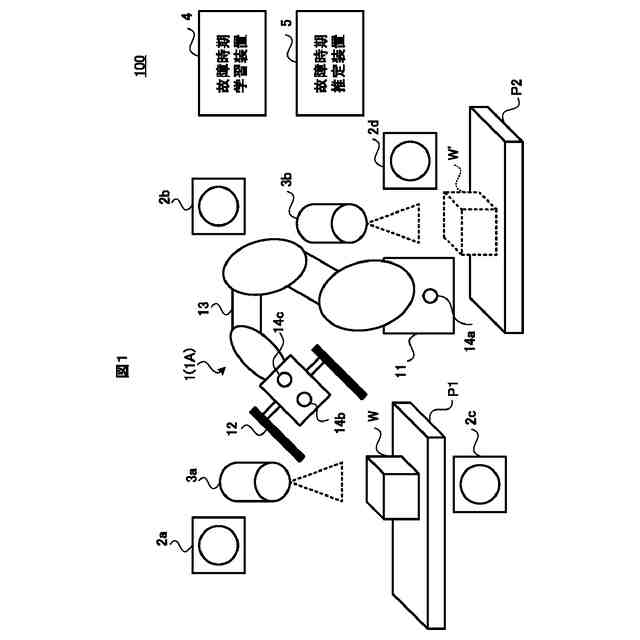
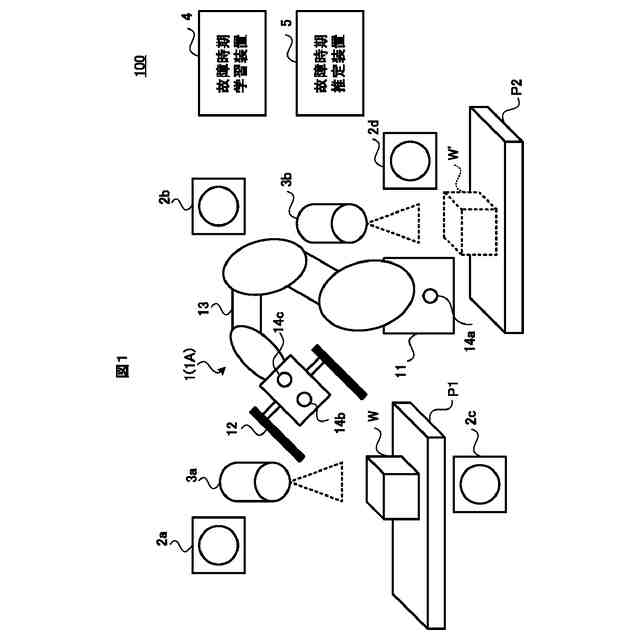
【解決手段】故障時期学習・推定システム100は、消耗度を取得可能な第1ロボットの消耗度及び第1ワークの把持・搬送回数を取得する学習データ取得部と、ロボットハンドのズレ量を求めるズレ算出部と、消耗度が最大値の場合の把持・搬送回数とロボットハンドのズレ量と第1ワークの荷重とを学習した学習済モデルを生成する学習部とを備える故障時期学習装置4と、消耗度を取得できない第2ロボットの把持・搬送の失敗時のロボットハンドのズレ量を第2ワークの荷重と対応づけた推定モデルの値と近い値を持つ学習済モデルに含まれる第1ロボットの消耗度が最大値の場合の把持・搬送回数に基づいて、第2ロボットのオーバーホール時期と推定する推定部とを備える故障時期推定装置5とを含む。
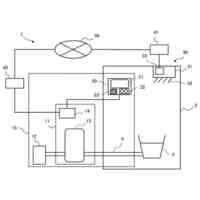
【選択図】図1
特許請求の範囲
【請求項1】
部品の消耗度を取得可能な第1ロボットから消耗度および前記第1ロボットのロボットハンドによる第1ワークを把持・搬送した把持・搬送回数を取得する学習データ取得部と、前記ロボットハンドによる前記第1ワークの把持・搬送の失敗時における前記ロボットハンドのズレ量を求めるズレ算出部と、前記第1ロボットの消耗度が最大値の場合の把持・搬送回数との前記ロボットハンドのズレ量と前記第1ワークの荷重とを対応づけた学習モデルを学習し、学習済モデルを生成する学習部と、を備える故障時期学習装置と、
前記故障時期学習装置から前記学習済モデルを取得する推定データ取得部と、部品の消耗度を取得できない第2ロボットのロボットハンドによる第2ワークの把持・搬送の失敗時における前記ロボットハンドのズレ量を前記第2ワークの荷重と対応づけた推定モデルを生成し、前記推定データ取得部の取得した前記学習済モデルのうち、前記推定モデルに含まれる値と近い値を持つ学習済モデルに含まれる前記第1ロボットの消耗度が最大値の場合の把持・搬送回数に基づいて、前記第2ロボットのオーバーホール時期と推定する推定部と、を備える故障時期推定装置と、
を含む、故障時期学習・推定システム。
続きを表示(約 1,200 文字)
【請求項2】
前記第2ロボットは作業者にオーバーホール時期を報知するための報知手段を備え、
前記故障時期推定装置は、前記第2ロボットに対して前記報知手段に前記作業者へ報知をさせるための指示信号を送信する報知指示部をさらに備える、
請求項1に記載の故障時期学習・推定システム。
【請求項3】
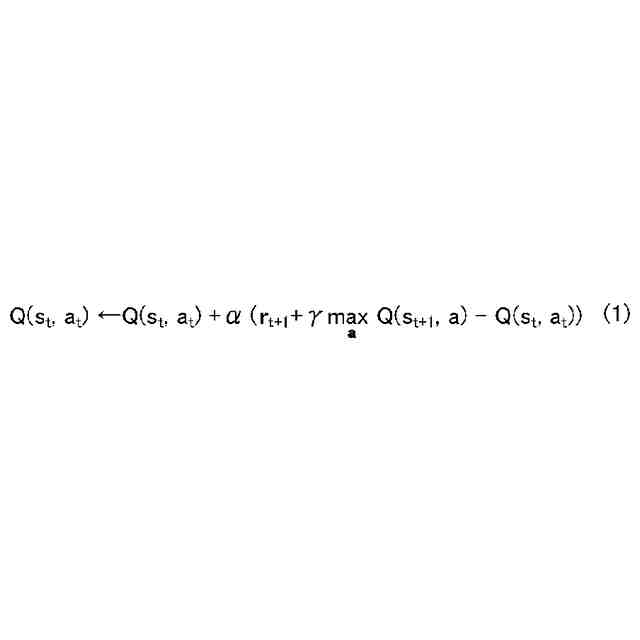
前記故障時期推定装置の推定部は、前記学習済モデルを使用して前記推定モデルを強化学習することにより、前記推定モデルに含まれる値と近い値を持つ学習済モデルを選択する、
請求項1または2に記載の故障時期学習・推定システム。
【請求項4】
故障時期学習・推定システムが実行する方法であって、
部品の消耗度を取得可能な第1ロボットから消耗度および前記第1ロボットのロボットハンドによる第1ワークを把持・搬送した把持・搬送回数を取得し、
前記ロボットハンドによる前記第1ワークの把持・搬送の失敗時における前記ロボットハンドのズレ量を求め、
前記第1ロボットの消耗度が最大値の場合の把持・搬送回数との前記ロボットハンドのズレ量と前記第1ワークの荷重とを対応づけた学習モデルを学習し、学習済モデルを生成し、
前記学習済モデルを取得し、
部品の消耗度を取得できない第2ロボットのロボットハンドによる第2ワークの把持・搬送の失敗時における前記ロボットハンドのズレ量を前記第2ワークの荷重と対応づけた推定モデルを生成し、
前記学習済モデルのうち、前記推定モデルに含まれる値と近い値を持つ学習済モデルに含まれる前記第1ロボットの消耗度が最大値の場合の把持・搬送回数に基づいて、前記第2ロボットのオーバーホール時期と推定する、
方法。
【請求項5】
コンピュータに、
部品の消耗度を取得可能な第1ロボットから消耗度および前記第1ロボットのロボットハンドによる第1ワークを把持・搬送した把持・搬送回数を取得する処理、
前記ロボットハンドによる前記第1ワークの把持・搬送の失敗時における前記ロボットハンドのズレ量を求める処理、
前記第1ロボットの消耗度が最大値の場合の把持・搬送回数との前記ロボットハンドのズレ量と前記第1ワークの荷重とを対応づけた学習モデルを学習し、学習済モデルを生成し、
前記学習済モデルを取得する処理、
部品の消耗度を取得できない第2ロボットのロボットハンドによる第2ワークの把持・搬送の失敗時における前記ロボットハンドのズレ量を前記第2ワークの荷重と対応づけた推定モデルを生成する処理、
前記学習済モデルのうち、前記推定モデルに含まれる値と近い値を持つ学習済モデルに含まれる前記第1ロボットの消耗度が最大値の場合の把持・搬送回数に基づいて、前記第2ロボットのオーバーホール時期と推定する処理、
を実行させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、故障時期学習・推定システム、方法、及び、プログラムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
産業用のロボットを使用した生産設備が普及している。ロボットハンドの部品が経年劣化によって消耗すると、ワークの把持位置が規定位置からズレ、結果的にワークを搬送先の規定位置からズレた位置に置くことになり、歩止まりが発生する。このため、消耗した部品の交換、いわゆるオーバーホールを実施することになる。ロボットハンドのオーバーホールは、部品の消耗度を取得できるロボットであれば、取得した消耗度からオーバーホール時期を推定することができる。しかしながら、ロボットの中には部品の消耗度を取得できないものある。この場合、ロボットハンドによる搬送に異常があった場合、作業員がロボットに張り付いて目視で原因分析をするため、作業員の原因分析にかかる工数が必要となる。そこで、例えば、特許文献1には、産業機械の故障条件を機械学習装置によって学習することにより故障を予知することができる故障予知システムが記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2017-120649号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示された機械学習装置は、故障の予知を行う対象の産業機械の故障条件を学習している。このため、故障の予知を行う対象以外の機械に対しては、最適なタイミングで故障の予知を行えない可能性がある。したがって、部品が消耗し、機械にオーバーホールが必要になった場合でも、最適なタイミングでオーバーホールを行うことができず、結局のところ、作業員の原因分析にかかる工数を削減できない可能性がある。
【0005】
本開示は、上述の問題を解決するためになされたものであり、作業員の原因分析にかかる工数を削減するとともに、最適なオーバーホール時期を推定することができる故障時期学習・推定システム、方法、及び、プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
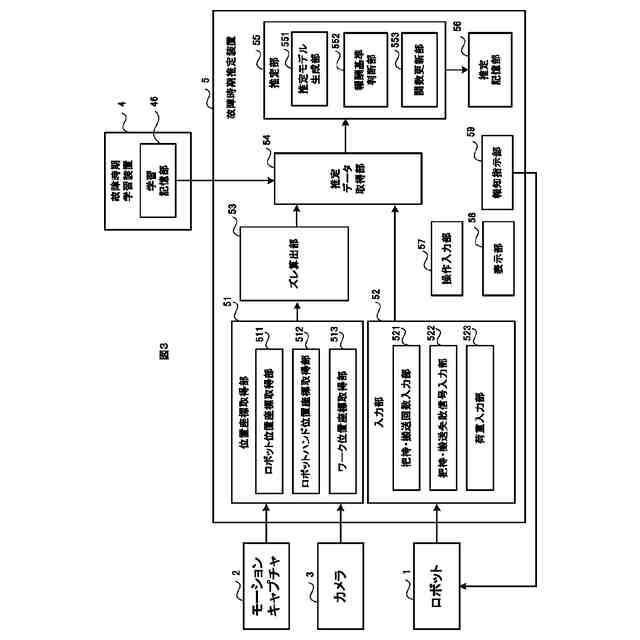
上述の目的を達成するために、本開示にかかる故障時期学習・推定システムは、部品の消耗度を取得可能な第1ロボットから消耗度および第1ロボットのロボットハンドによる第1ワークを把持・搬送した把持・搬送回数を取得する学習データ取得部と、ロボットハンドによる第1ワークの把持・搬送の失敗時におけるロボットハンドのズレ量を求めるズレ算出部と、第1ロボットの消耗度が最大値の場合の把持・搬送回数とのロボットハンドのズレ量と第1ワークの荷重とを対応づけた学習モデルを学習し、学習済モデルを生成する学習部と、を備える故障時期学習装置と、故障時期学習装置から学習済モデルを取得する推定データ取得部と、部品の消耗度を取得できない第2ロボットのロボットハンドによる第2ワークの把持・搬送の失敗時におけるロボットハンドのズレ量を第2ワークの荷重と対応づけた推定モデルを生成し、推定データ取得部の取得した学習済モデルのうち、推定モデルに含まれる値と近い値を持つ学習済モデルに含まれる第1ロボットの消耗度が最大値の場合の把持・搬送回数に基づいて、第2ロボットのオーバーホール時期と推定する推定部と、備える故障時期推定装置と、を含む。
【発明の効果】
【0007】
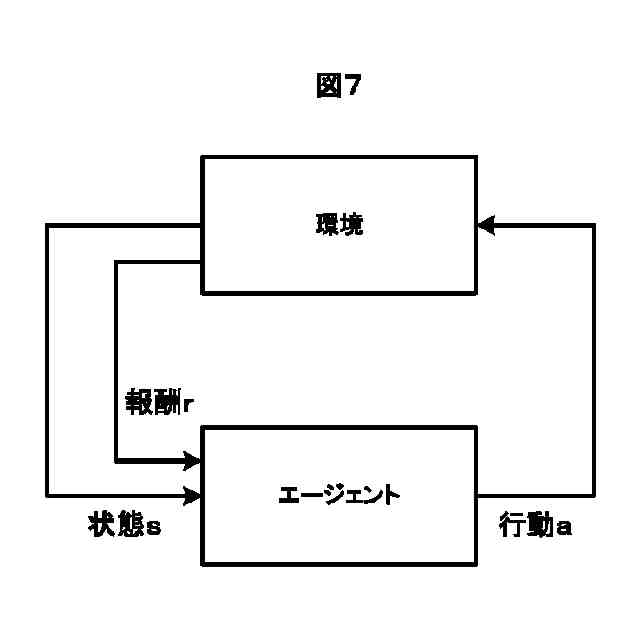
本開示によれば、故障時期学習・推定システムは、部品の消耗度を取得できるロボットから取得した部品の消耗度およびワークの把持・搬送回数と位置ズレを学習して学習済モデルを生成し、学習済モデルを強化学習することにより、消耗度を取得できないロボットにおいて、最適なオーバーホール時期を推定することができる。これにより、作業員の原因分析にかかる工数を削減するとともに、最適なオーバーホール時期を推定することができる故障時期学習・推定システムを提供することができる。
【図面の簡単な説明】
【0008】
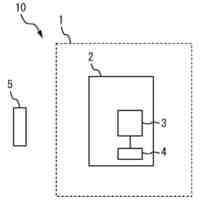
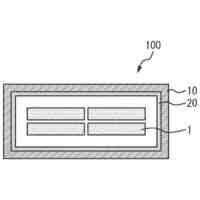
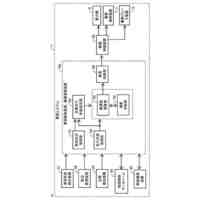
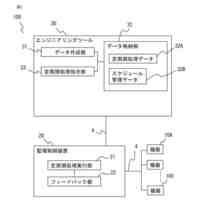
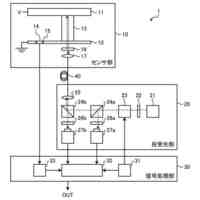
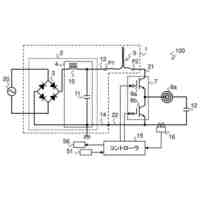
本開示の実施の形態1にかかる故障時期学習・推定システムの構成を示す図
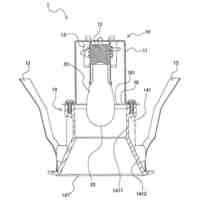
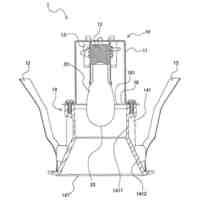
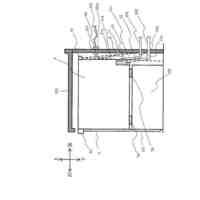
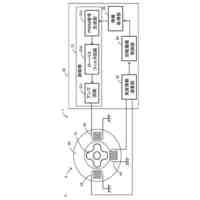
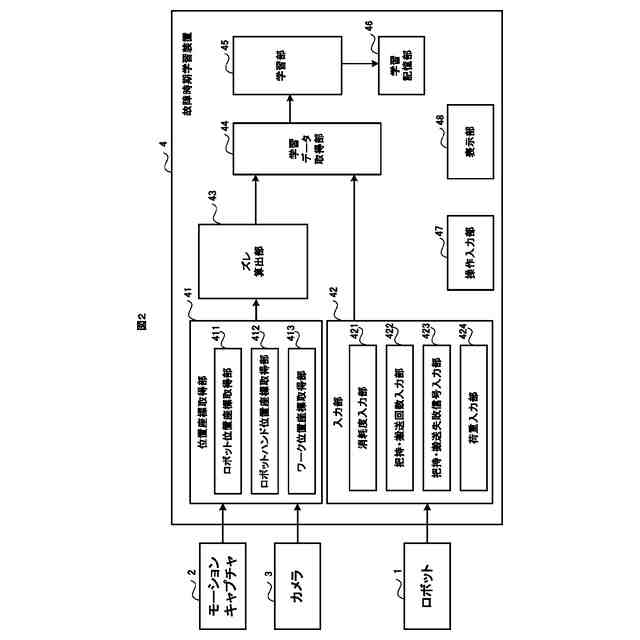
図1に示した故障時期学習装置の概要を示す図
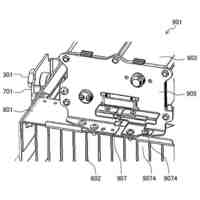
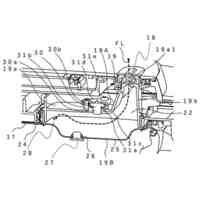
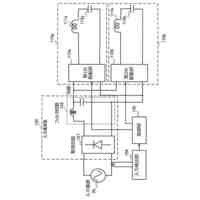
図1に示した故障時期推定装置の概要を示す図
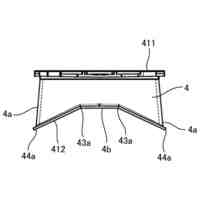
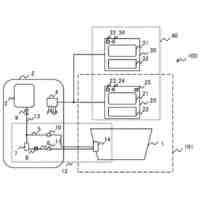
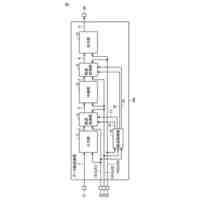
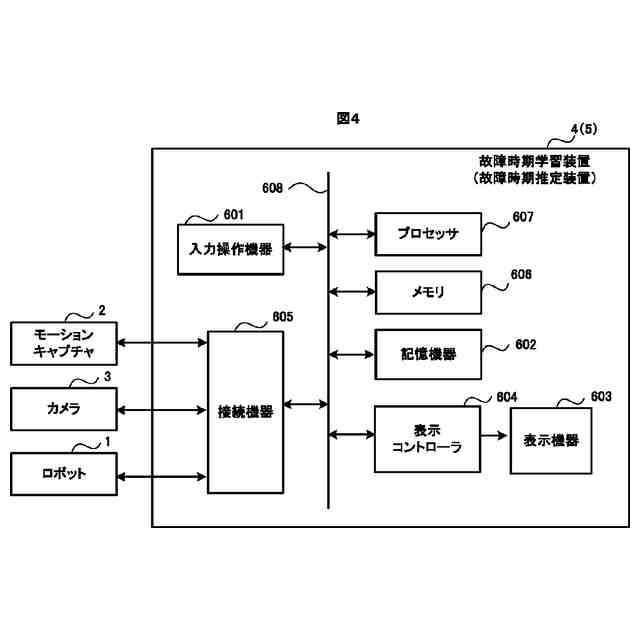
図2に示した故障時期学習装置および図3に示した故障時期推定装置のハードウエア構成の一例を示す図
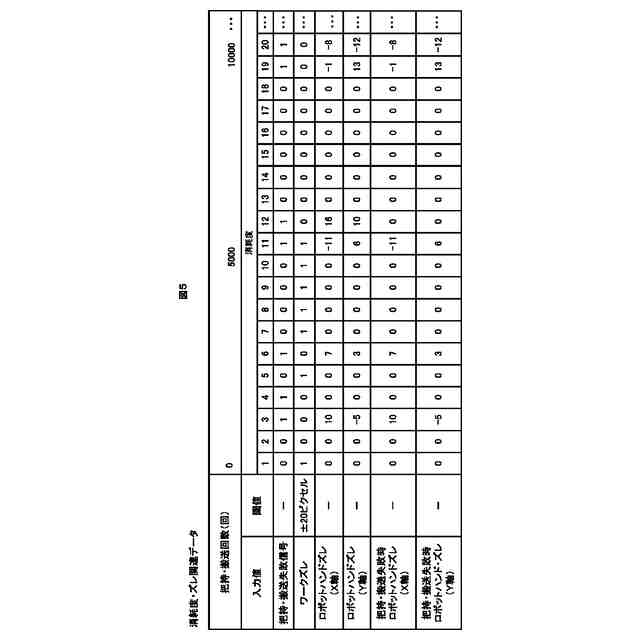
図2に示した故障時期学習装置で学習する消耗度とズレの関連データを示す図
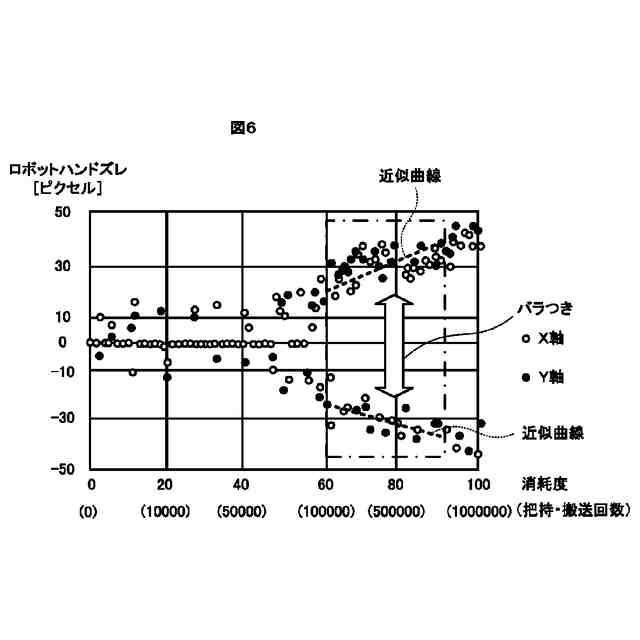
実施の形態にかかる消耗度とズレのとの近似曲線の概要を示す図
図3に示した故障時期推定装置における強化学習の概要を示す図
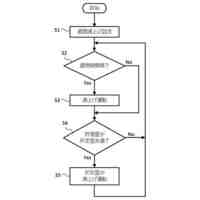
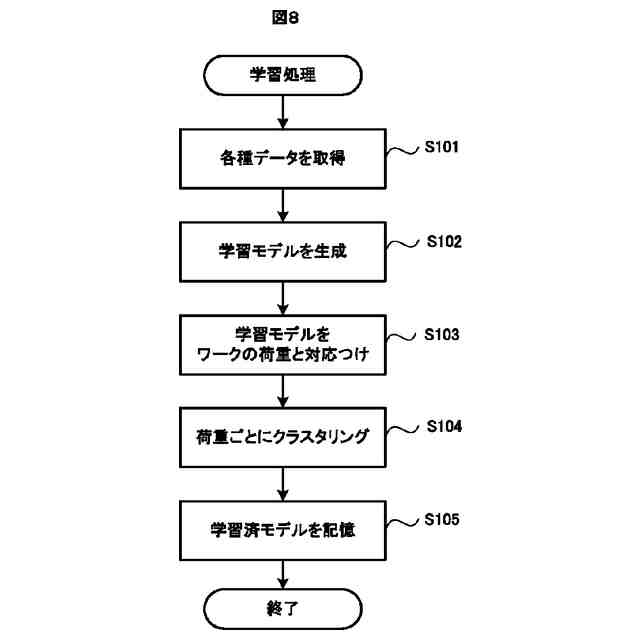
実施の形態にかかる学習処理のフローチャート
実施の形態にかかる推定処理のフローチャート
【発明を実施するための形態】
【0009】
以下、本開示の実施の形態にかかる故障時期学習装置4および故障時期推定装置5を含む故障時期学習・推定システム100について、図面を参照しつつ説明する。なお、同一または同等の部分に同一の符号を付す。
【0010】
故障時期学習装置4は、部品の消耗度を取得できるロボットから取得した部品の消耗度およびワークの把持・搬送回数と位置ズレから学習して学習済みモデルを生成することができる装置である。故障時期推定装置5は、故障時期学習装置4で生成した学習済モデルを強化学習することにより、消耗度を取得できないロボットにおいて、最適なオーバーホール時期を推定することができる装置である。また、故障時期学習・推定システム100は、故障時期学習装置4および故障時期推定装置5を含むシステムである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
給湯装置
14日前
三菱電機株式会社
照明器具
3日前
三菱電機株式会社
回転電機
4日前
三菱電機株式会社
照明器具
3日前
三菱電機株式会社
照明器具
3日前
三菱電機株式会社
電気掃除機
11日前
三菱電機株式会社
電池パック
3日前
三菱電機株式会社
食器洗浄機
4日前
三菱電機株式会社
加熱調理器
10日前
三菱電機株式会社
換気端末部材
3日前
三菱電機株式会社
最適演算装置
3日前
三菱電機株式会社
角度検出装置
3日前
三菱電機株式会社
貯湯式給湯機
4日前
三菱電機株式会社
誘導加熱装置
11日前
三菱電機株式会社
給湯システム
3日前
三菱電機株式会社
給湯システム
3日前
三菱電機株式会社
貯湯式給湯機
3日前
三菱電機株式会社
データ転送装置
14日前
三菱電機株式会社
誘導加熱調理器
4日前
三菱電機株式会社
監視制御システム
14日前
三菱電機株式会社
燃料電池システム
3日前
三菱電機株式会社
空調制御システム
11日前
三菱電機株式会社
照明制御システム
14日前
三菱電機株式会社
光通信用モジュールの検査方法
3日前
三菱電機株式会社
電圧測定装置および電圧測定方法
3日前
三菱電機株式会社
照明制御システムおよび制御装置
10日前
三菱電機株式会社
パワー半導体装置及びその製造方法
11日前
三菱電機株式会社
接合構造体製造方法及び接合構造体
10日前
三菱電機株式会社
運転支援システムおよび運転支援方法
11日前
三菱電機株式会社
炭化珪素半導体装置及び電力変換装置
11日前
三菱電機株式会社
手乾燥装置及び手乾燥装置の制御方法
11日前
三菱電機株式会社
半導体装置および半導体装置の製造方法
3日前
三菱電機株式会社
半導体装置および半導体装置の製造方法
4日前
三菱電機株式会社
電源回路装置およびそれを有する加熱調理器
14日前
三菱電機株式会社
半導体試験装置および半導体装置の製造方法
11日前
三菱電機株式会社
空調システム、空気調和機、および換気装置
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ