TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024125039
公報種別
公開特許公報(A)
公開日
2024-09-13
出願番号
2023033103
出願日
2023-03-03
発明の名称
自律走行車、自律走行方法、および自律走行プログラム
出願人
三菱電機株式会社
代理人
弁理士法人クロスボーダー特許事務所
主分類
G05D
1/43 20240101AFI20240906BHJP(制御;調整)
要約
【課題】進行方向に障害物があったとしても進行可能であれば進行することで、自律走行車が必要以上に回避あるいは停止してしまうのを防ぐことを目的とする。
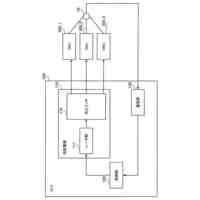
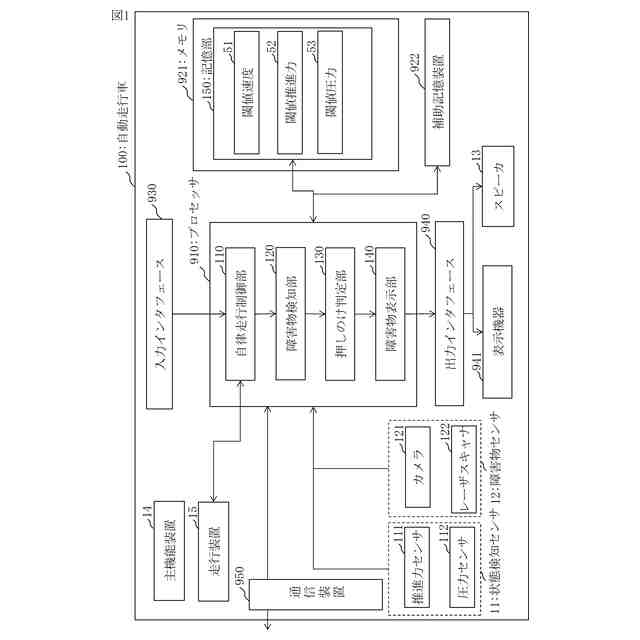
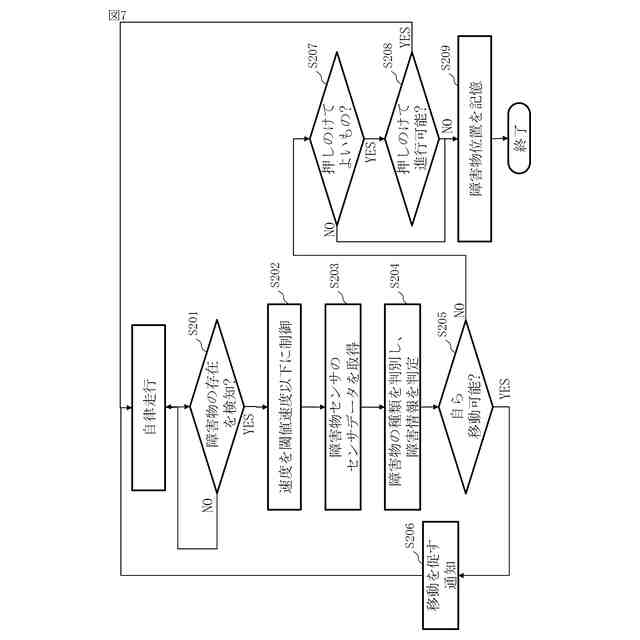
【解決手段】自律走行車100は、進行方向に障害物の存在が検知されると、障害物を押しのけて進行することが可能か否かを判定する押しのけ判定部130を備える。自律走行車100は、自律走行車100の状態を検知する状態検知センサ11を備える。押しのけ判定部130は、障害物を押したときに状態検知センサ11により検知される自律走行車100の状態に基づいて、障害物を押しのけて進行可能か否かを判定する。
【選択図】図1
特許請求の範囲
【請求項1】
自律走行する自律走行車において、
進行方向に障害物の存在が検知されると、前記障害物を押しのけて進行することが可能か否かを判定する押しのけ判定部を備える自律走行車。
続きを表示(約 1,400 文字)
【請求項2】
前記自律走行車は、
前記自律走行車の状態を検知する状態検知センサを備え、
前記押しのけ判定部は、
前記障害物を押したときに前記状態検知センサにより検知される前記自律走行車の状態に基づいて、進行可能か否かを判定する請求項1に記載の自律走行車。
【請求項3】
前記自律走行車は、
前記状態検知センサとして、走行中の推進力を前記自律走行車の状態として検知する推進力センサを備え、
前記押しのけ判定部は、
前記障害物を押したときに前記推進力センサにより検知される推進力に基づいて、予め定められた閾値推進力で前記障害物を押しても通れない場合に前記障害物を押しのけて進行することは不可と判定する請求項2に記載の自律走行車。
【請求項4】
前記自律走行車は、
前記状態検知センサとして、前記自律走行車の前方にかかる圧力を前記自律走行車の状態として検知する圧力センサを備え、
前記押しのけ判定部は、
前記障害物を押したときに前記圧力センサにより検知される圧力に基づいて、予め定められた閾値圧力で前記障害物を押しても通れない場合に前記障害物を押しのけて進行することは不可と判定する請求項2または請求項3に記載の自律走行車。
【請求項5】
前記自律走行車は、自律走行を制御する自律走行制御部を備え、
前記自律走行制御部は、
前記障害物の存在が検知されると、前記自律走行車の速度を予め定められた閾値速度以下に制御する請求項1から請求項3のいずれか1項に記載の自律走行車。
【請求項6】
前記自律走行車は、
前記障害物の特徴を検知する障害物センサを備え、
前記押しのけ判定部は、
前記障害物の存在が検知されると、前記障害物センサにより取得される前記障害物の特徴に基づいて、前記障害物における障害の状況を示す障害情報を判定し、前記障害情報に基づいて進行可能か否かを判定する請求項1から請求項3のいずれか1項に記載の自律走行車。
【請求項7】
前記自律走行車は、
前記障害物センサとして、カメラとレーザスキャナを備え、
前記押しのけ判定部は、
前記カメラと前記レーザスキャナにより取得される前記障害物の色と形状とを含む前記障害物の特徴を用いて前記障害物の種類を判別し、前記障害物の種類を用いて前記障害情報を判定する請求項6に記載の自律走行車。
【請求項8】
前記押しのけ判定部は、
前記障害情報に基づいて、前記障害物の種類が自ら移動できるものであると判定した場合に、前記障害物に移動を促す通知を出力する請求項6に記載の自律走行車。
【請求項9】
前記押しのけ判定部は、
前記障害情報に基づいて、前記障害物の種類が押しのけてはいけないものであると判定した場合に、前記自律走行車を停止させる請求項6に記載の自律走行車。
【請求項10】
前記自律走行車は、
前記障害物を押しのけることができない場合に、前記障害物の位置を障害物位置として記憶し、前記障害物位置を表示機器に表示する障害物表示部を備える請求項1から請求項3のいずれか1項に記載の自律走行車。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、自律走行車、自律走行方法、および自律走行プログラムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
通常の自律走行ロボットでは、レーザおよびカメラを搭載し、障害物との衝突を予見すると衝突を回避するあるいは停止するといった機能が備わっている。よって、自律走行ロボットが障害物に囲まれると、自律走行ロボットは停止してしまい動作できなくなる。
【0003】
近年、ビニールハウスあるいは山間部などで作業する農業向け自律走行ロボットが開発されつつある。農業向け自律走行ロボットにおいても、障害物との衝突を予見した際の機能は上述した自律走行ロボットと同様である。
【0004】
一方、米国など平野部の広域農業で使用される大型の自律農業機械は、植物などの成長に伴い生じる枝葉との衝突を許容する前提で動作している。そのため、一般的に衝突を回避するために必要なレーザおよびカメラは搭載していない。
【0005】
特許文献1には、カメラで撮影した画像から作物株を認識し、作物株を回避して株間の雑草を掃討する移動プラットフォームが開示されている。
【先行技術文献】
【特許文献】
【0006】
特開2022-052948号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
農業向け自律走行ロボットは、例えば、散水あるいは作物の運搬といった主機能を実現するために、決められた走行ルートを走行する。
一般的にビニールハウスあるいは山間部といった場所の植物は、作物、樹木、および雑草も含めて成長が早く、自律走行ロボットの進行の障害となるおそれがある。実際には葉、小枝、雑草、あるいはビニールに切れ端のような障害物であれば、自律走行ロボットは障害物を押し通って走行しても構わない。しかし、現在の自律走行ロボットでは、単に「障害物あり」としか検知しないため、些細な障害物であっても回避あるいは停止してしまい、自律走行ロボットの主機能の遂行を妨げてしまうという課題があった。
また、特許文献1の技術では、カメラで撮影した画像から作物株を認識し、作物株であれば回避し、雑草であれば掃討している。特許文献1の技術であっても、作物株であれば回避し、その他の葉、小枝、あるいはビニールに切れ端のような障害物であれば回避あるいは停止してしまい、やはり自律走行ロボットの主機能の遂行を妨げてしまう。
【0008】
本開示では、自律走行車において、進行方向に障害物があったとしても進行可能であれば進行することで、自律走行車が必要以上に回避あるいは停止してしまうのを防ぐことを目的とする。
【課題を解決するための手段】
【0009】
本開示に係る自律走行車は、自律走行する自律走行車において、
進行方向に障害物の存在が検知されると、前記障害物を押しのけて進行することが可能か否かを判定する押しのけ判定部を備える。
【発明の効果】
【0010】
本開示に係る自律走行車は、進行方向に障害物の存在が検知されると、その障害物を押しのけて進行することが可能か否かを判定する押しのけ判定部を備える。よって、本開示に係る自律走行車によれば、進行方向に障害物があったとしても進行可能であれば進行することができ、自律走行車が必要以上に回避あるいは停止してしまうのを防ぐことができるという効果を奏する。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
冷蔵庫
6日前
三菱電機株式会社
炊飯器
8日前
三菱電機株式会社
冷蔵庫
20日前
三菱電機株式会社
清掃具
12日前
三菱電機株式会社
梱包材
21日前
三菱電機株式会社
照明装置
7日前
三菱電機株式会社
制御装置
26日前
三菱電機株式会社
駆動回路
19日前
三菱電機株式会社
給湯装置
14日前
三菱電機株式会社
照明器具
19日前
三菱電機株式会社
半導体装置
6日前
三菱電機株式会社
光通信装置
13日前
三菱電機株式会社
半導体装置
13日前
三菱電機株式会社
漏電遮断器
12日前
三菱電機株式会社
直流遮断器
12日前
三菱電機株式会社
加熱調理器
12日前
三菱電機株式会社
半導体装置
13日前
三菱電機株式会社
電力変換器
12日前
三菱電機株式会社
加熱調理器
6日前
三菱電機株式会社
半導体装置
22日前
三菱電機株式会社
非可逆回路
22日前
三菱電機株式会社
加熱調理器
6日前
三菱電機株式会社
保護継電器
21日前
三菱電機株式会社
加熱調理器
6日前
三菱電機株式会社
給水システム
19日前
三菱電機株式会社
絶縁検査装置
12日前
三菱電機株式会社
照明システム
13日前
三菱電機株式会社
照明システム
13日前
三菱電機株式会社
貯湯式給湯機
22日前
三菱電機株式会社
姿勢変更装置
8日前
三菱電機株式会社
ねじ締め装置
14日前
三菱電機株式会社
給湯システム
14日前
三菱電機株式会社
空調システム
7日前
三菱電機株式会社
電力変換装置
12日前
三菱電機株式会社
ウェザーカバー
19日前
三菱電機株式会社
周波数変換回路
12日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ