TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024150155
公報種別
公開特許公報(A)
公開日
2024-10-23
出願番号
2023063421
出願日
2023-04-10
発明の名称
ねじ締め装置
出願人
三菱電機株式会社
代理人
弁理士法人深見特許事務所
主分類
B23P
19/06 20060101AFI20241016BHJP(工作機械;他に分類されない金属加工)
要約
【課題】ねじ締めに必要な時間を低減しつつ、ねじ締めにおける不良の発生を抑制することができるねじ締め装置を提供する。
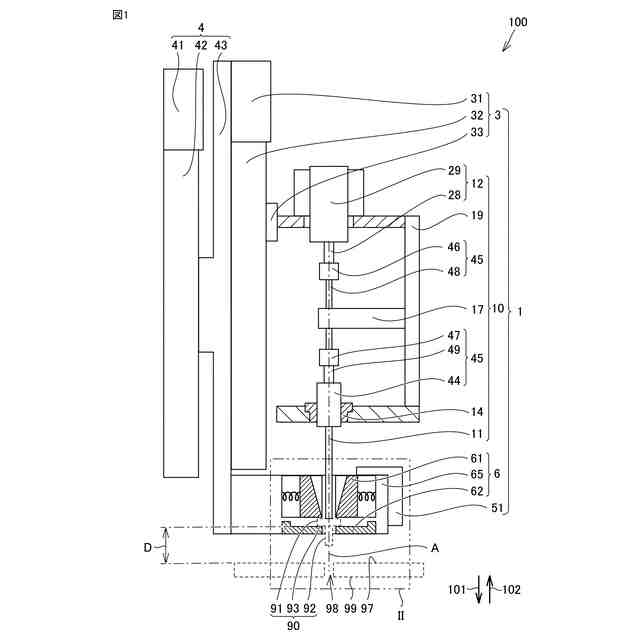
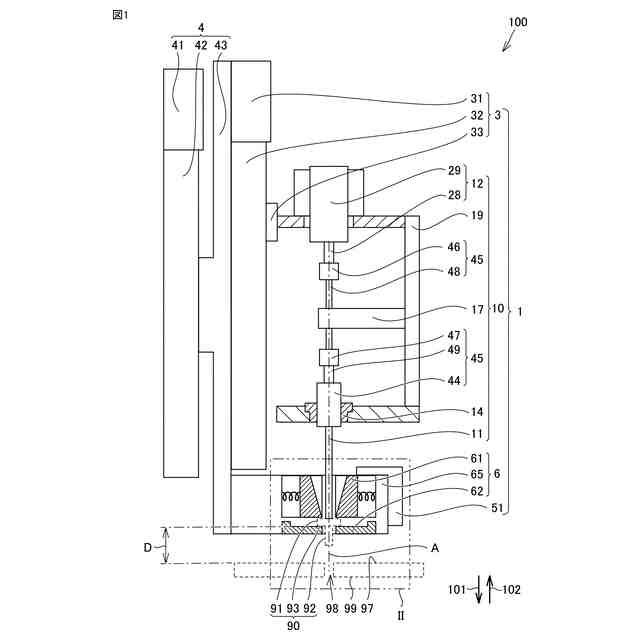
【解決手段】ねじ締め装置100は、被締結物99にねじ90を締結するねじ締め装置であって、回転工具ユニット10と、工具位置変位部3と、制御部2と、第1距離測定部51とを備えている。回転工具ユニット10は、回転工具11と、モータ12とを有している。制御部2は、モータ12および工具位置変位部3を制御する。第1距離測定部51は、ねじ90と被締結物99との間の距離を測定する。制御部2は、第1距離測定部51の出力に基づいて、ねじ90の頭部91が被締結物99に接触しないようにねじ90を被締結物99に仮締めし、ねじ90を被締結物99に仮締めした後に、ねじ90を締結するトルクを大きくするように、モータ12および工具位置変位部3を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
被締結物にねじを締結するねじ締め装置であって、
前記ねじを回転させる回転工具と、前記回転工具を回転させるモータとを有する回転工具ユニットと、
前記回転工具ユニットを前記回転工具の回転軸方向に沿って移動させる工具位置変位部と、
前記モータおよび前記工具位置変位部を制御する制御部と、
前記ねじと前記被締結物との間の距離を測定する第1距離測定部とを備え、
前記制御部は、前記第1距離測定部からの出力に基づいて、前記ねじの頭部が前記被締結物に接触しないように前記ねじを前記被締結物に仮締めし、前記ねじを前記被締結物に仮締めした後に、前記ねじを締結するトルクを大きくするように、前記モータおよび前記工具位置変位部を制御する、ねじ締め装置。
続きを表示(約 760 文字)
【請求項2】
前記制御部は、前記工具位置変位部の制御遅れ量と前記第1距離測定部からの出力とに基づいて、前記ねじの前記頭部が前記被締結物に接触しないように前記ねじを前記被締結物に仮締めする、請求項1に記載のねじ締め装置。
【請求項3】
前記ねじと前記回転工具の回転軸とが交差する位置に前記ねじを保持可能である第1チャックと、
前記回転軸方向に垂直な方向に沿って延在する平坦面を有している第2チャックと、を備え、
前記平坦面は、前記第1チャックと前記被締結物との間に位置する、請求項1または請求項2に記載のねじ締め装置。
【請求項4】
前記回転工具ユニットは、第2距離測定部と、前記回転工具に取り付けられるねじ押し付け部と、を有し、
前記第2距離測定部は、前記ねじ押し付け部と前記第2距離測定部との間の距離を測定し、
前記ねじ押し付け部は、前記回転工具が前記ねじに加える押し付け力が大きくなるにつれて前記第2距離測定部に近づき、
前記制御部は、前記第2距離測定部からの出力と前記第1距離測定部からの出力とに基づいて、前記ねじの前記頭部が前記被締結物に接触しないように前記ねじを前記被締結物に仮締めし、前記ねじを前記被締結物に仮締めした後に、前記ねじを締結するトルクを大きくするように、前記モータおよび前記工具位置変位部を制御する、請求項1または請求項2に記載のねじ締め装置。
【請求項5】
前記工具位置変位部と前記回転工具ユニットとを繋いでいるコンプライアンス部を備え、
前記コンプライアンス部は、前記回転軸方向に垂直な方向に沿って前記回転工具ユニットを移動可能である、請求項1または請求項2に記載のねじ締め装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ねじ締め装置に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
ねじ締め装置の制御方式には、ねじに加えるトルクに基づいて仮締めを終了するトルク制御方式がある。トルク制御方式を用いたねじ締め装置の一例として、国際公開第2021/261021号(特許文献1)には、回転工具と、第1モータと、第2モータと、制御部とを有するねじ締め装置が記載されている。回転工具は、ねじを回転させる。第1モータは、回転工具を回転駆動する。第2モータは、回転工具を軸方向に移動させる。制御部は、第1モータを予め決められた回転速度とし、第2モータによる回転工具の移動を、トルクが閾値トルクに達するまで行い、ねじをねじ穴にねじ込むための第1ステップと、トルクを予め決められたトルクに達するまで増加させる、ねじの本締めを行うための第2ステップと、を実行する。
【先行技術文献】
【特許文献】
【0003】
国際公開第2021/261021号
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1に記載されているねじ締め装置によれば、ねじ穴にねじ込む動作(仮締め)を速くするにつれて、トルクが規定値に達したことを検出してから仮締めを停止するまでに遅れが発生しやすくなる。このため、ねじに加わるトルクが過度に大きくなることによって、ねじおよび被締結物が変形する不良が発生するおそれがある。従って、ねじ締めに必要な時間を低減しつつ、ねじ締めにおける不良の発生を抑制することが困難である。
【0005】
本開示は、上記に鑑みてなされたものであり、その目的は、ねじ締めに必要な時間を低減しつつ、ねじ締めにおける不良の発生を抑制することが可能なねじ締め装置を提供することである。
【課題を解決するための手段】
【0006】
本開示に係るねじ締め装置は、被締結物にねじを締結するねじ締め装置であって、回転工具ユニットと、工具位置変位部と、制御部と、第1距離測定部とを備えている。回転工具ユニットは、回転工具と、モータとを有している。回転工具は、ねじを回転させる。モータは、回転工具を回転させる。工具位置変位部は、回転工具ユニットを回転工具の回転軸方向に沿って移動させる。制御部は、モータおよび工具位置変位部を制御する。第1距離測定部は、ねじと被締結物との間の距離を測定する。制御部は、第1距離測定部の出力に基づいて、ねじの頭部が被締結物に接触しないようにねじを被締結物に仮締めし、ねじを被締結物に仮締めした後に、ねじを締結するトルクを大きくするように、モータおよび工具位置変位部を制御する。
【発明の効果】
【0007】
本開示に係るねじ締め装置によれば、制御部は、第1距離測定部の出力に基づいて、ねじの頭部が被締結物に接触しないようにねじを被締結物に仮締めする。このため、仮締めを速くした場合においても、ねじの頭部が被締結物に接触することを抑制できる。これによって、ねじ締めに必要な時間を低減しつつ、ねじ締めにおける不良の発生を抑制することが可能なねじ締め装置を提供することができる。
【図面の簡単な説明】
【0008】
実施の形態1に係るねじ締め装置の構成を示す一部断面模式図である。
図1の領域IIを示す拡大一部断面模式図である。
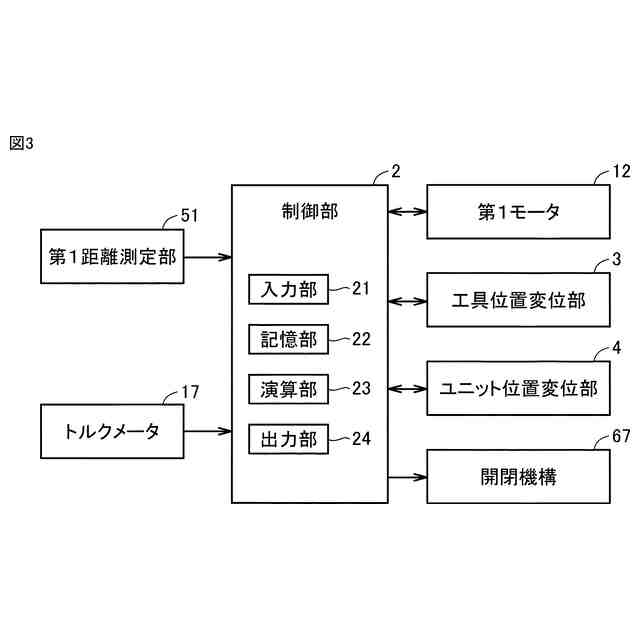
実施の形態1に係るねじ締め装置の構成を概略的に示すブロック図である。
実施の形態1に係るねじ締め装置の動作を概略的に示すフロー図である。
ねじを供給する工程を示す一部断面模式図である。
第2チャックにねじを押し付ける工程を示す一部断面模式図である。
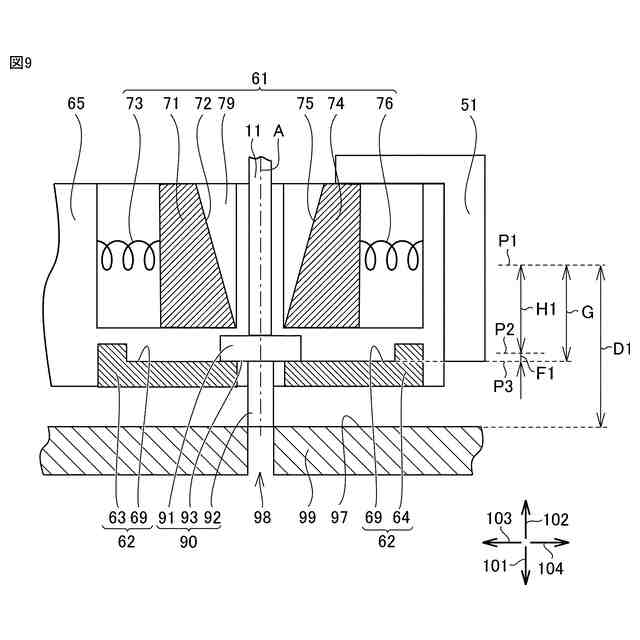
ねじと被締結物との間の距離を測定する工程を示す一部断面模式図である。
ねじと被締結物が接触する直前までねじ締めユニットを移動する工程を示す一部断面模式図である。
ねじと被締結物が接触するまでねじ締めユニットを移動する工程を示す一部断面模式図である。
工具位置変位部がねじを移動させる様子を示す模式図である。
ねじを仮締めする工程を示す一部断面模式図である。
ねじを本締めする工程を示す一部断面模式図である。
実施の形態2に係るねじ締め装置の構成を示す一部断面模式図である。
実施の形態2に係るねじ締め装置の構成を概略的に示すブロック図である。
実施の形態2に係るねじ締め装置の動作を概略的に示すフロー図である。
実施の形態3に係るねじ締め装置の構成を示す一部断面模式図である。
実施の形態4に係るねじ締め装置の構成を示す一部断面模式図である。
【発明を実施するための形態】
【0009】
以下、図面に基づいて本開示の実施の形態について説明する。なお、以下の図面において同一または相当する部分には同一の参照番号を付し、その説明は繰返さない。
【0010】
実施の形態1.
<ねじ締め装置の構成>
図1から図3を用いて、実施の形態1に係るねじ締め装置100の構成について説明する。図1に示されるように、ねじ締め装置100は、ねじ締めユニット1と、ユニット位置変位部4とを主に有している。ねじ締めユニット1は、ねじ90を回転させつつ、ねじ90を移動させる。ねじ締め装置100は、ユニット位置変位部4に固定されている。ユニット位置変位部4は、ねじ締めユニット1を移動させる。ねじ締め装置100は、ねじ90を被締結物99に締結する。被締結物99の主面97において、雌ねじ98が設けられている。ねじ90は、頭部91と、雄ねじ部92とを有している。雄ねじ部92は、頭部91に連なっている。頭部91は、座面93を構成している。座面93は、主面97に接触する面である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る





 特許ウォッチ
特許ウォッチ