TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024117215
公報種別
公開特許公報(A)
公開日
2024-08-29
出願番号
2023023180
出願日
2023-02-17
発明の名称
ナットランナ
出願人
公立大学法人大阪
,
株式会社ユタニ
代理人
個人
,
個人
主分類
B25B
23/14 20060101AFI20240822BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ボルト又はナットの着座や底付を正しく判定し、判定精度を向上させて不良化率を低減するナットランナを提供する。
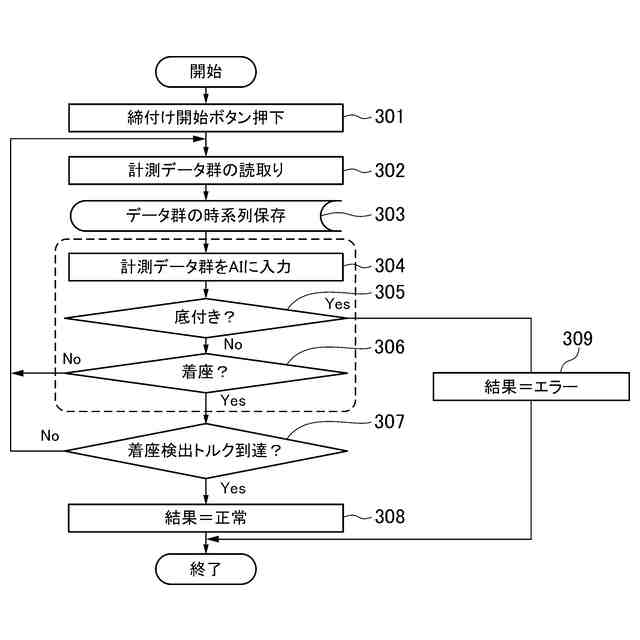
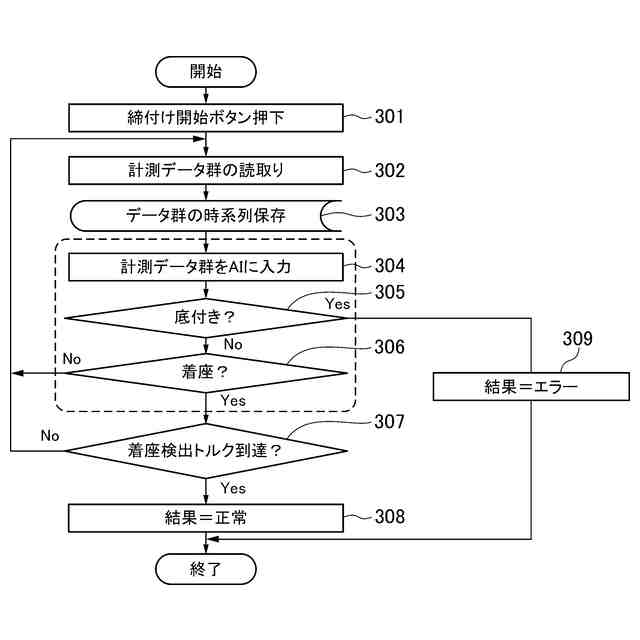
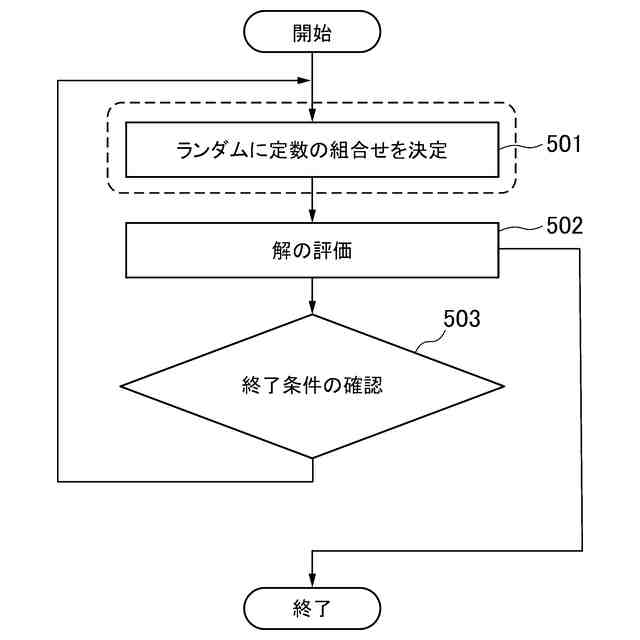
【解決手段】締付対象物に対してボルト又はナットの締付制御を行う制御手段を有するナットランナにおいて、前記制御手段は、進化戦略に従って重み係数の最適値を探索する最適値探索手段を用いて締付制御を行うAI締付制御手段を有し、前記AI締付制御手段は、締付開始後の計測データ群を前記最適値探索手段に入力することにより、前記締付対象物の着座及び/又は底付を検出する検出手段を有することを特徴とする。
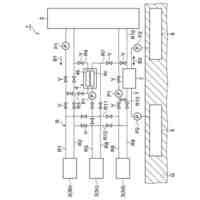
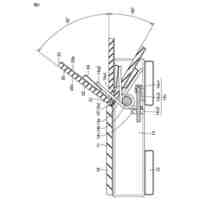
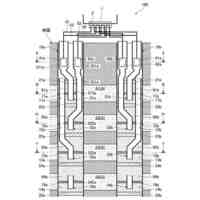
【選択図】図3
特許請求の範囲
【請求項1】
締付対象物に対してボルト又はナットの締付制御を行う制御手段を有するナットランナにおいて、
前記制御手段は、進化戦略に従って重み係数の最適値を探索する最適値探索手段を用いて締付制御を行うAI締付制御手段を有し、
前記AI締付制御手段は、締付開始後の計測データ群を前記最適値探索手段に入力することにより、前記締付対象物の着座及び/又は底付を検出する検出手段を有することを特徴とするナットランナ。
続きを表示(約 490 文字)
【請求項2】
前記AI締付制御手段は、ナットランナの外部に設けたこと特徴とする請求項1記載のナットランナ。
【請求項3】
前記AI締付制御手段は、更に予め設定された前記締付対象物の着座トルクに到達したか否かを判定する判定手段を有し、前記判定手段により前記着座トルクに到達したと判定されるまで、前記検出手段による前記締付対象物の着座及び/又は底付の検出を繰り返すこと特徴とする請求項1又は2記載のナットランナ。
【請求項4】
前記最適値探索手段は、締付学習データから共分散行列適応進化戦略(CMA-ES:Covariance Matrix Adaptation Evolution Strategy)のアルゴリズムに基づいて最適解(評価値)を探索することを特徴とする請求項1記載のナットランナ。
【請求項5】
前記ナットは、セルフロックナットであることを特徴とする請求項1記載のナットランナ。
【請求項6】
前記ナットランナは、エアナットランナ又は据付型ナットランナであることを特徴とする請求項1記載のナットランナ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ナットランナに関し、締付対象物の着座や底付きを自動的に検出するナットランナに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
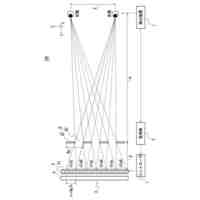
ナットランナは自動車車体製造、航空宇宙産業、重機・建機組立、家電組立等、産業界の組立分野において幅広く使われている。これらの組立現場では、ナットランナが締付対象物に対してボルトやナットを締付ける際に利用される。ボルトやナットの締付には、回転する先端部分にソケットを装着して用いられる。ナットランナの形状は、手で持って作業をするハンドナットランナや設備に搭載する据付型のナットランナがある。ハンドナットランナとしては、ストレートタイプ、ピストルタイプ、アングルタイプ等がある。
【0003】
ナットランナの駆動方式としては、圧縮空気を利用したエア式ナットランナ、電動モータの軸から減速ギアを経由してソケットへ伝達してボルトやナットを回転させる電気式ナットランナが一般的である。締付強度(トルク、Nmで表す)の与え方としては、連続的にトルクを与えるダイレクト駆動(DC)方式と、パルス状のトルクを与えながら締付けるパルス方式がある。パルス方式はDC方式に比べて、締付完了段階における反力が少ないというメリットがある反面、正確なプログラム制御や締付トルクの判定が難しいというデメリットがある。
【0004】
エア式ナットランナでは、規定トルクに達するとクラッチが外れて空転する、又はシャットオフバルブが機能して回転を止めることにより、規定トルクの締付けを行う。電動ナットランナにおいては、回転速度・角度・締付トルクをプログラムにより制御を行うことが可能であり、回転速度が自動で切り替わる機能を有するものもあり、例えば締付ける時には高速回転で、最後は低速になって仕上げを行うといった作業を自動で行うことができる。エア式ナットランナにおいても、同様な機能を追加したものがある。
【0005】
特許文献1には、機械学習装置を用いたネジ締付システムが開示されている。
【0006】
また、特許文献2には、締付開始から着座までボルトやナットの締付対象物を例えば高速回転で締付け、その着座後から締付完了まで締付対象物を例えば低速回転で締付けるナットランナ及びその制御方法が開示されている。
【0007】
特許文献3には、ニューラルネットワークを用いて、ナットランナによるねじの締付を制御するナットランナ制御装置が開示されている。具体的には、特許文献3では、軸力測定結果を教師として、ナットランナ締付を軸力測定無しでも軸力と紐付けて締付け判定制御している。
【先行技術文献】
【特許文献】
【0008】
特開2017-30088号公報
特開2006-110657号公報
特開平6-206127号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
上記特許文献1では、報酬の決め方が、「距離センサによるネジ頭部と座面間の距離測定」に依存しているため、ネジ締付は距離センサが必要である。行動(制御動作)を最適化するためのニューラルネットワークによりエラーの少ない制御動作を学習し、その動作で動かす制御を行う。判定の良し悪しが学習されるわけではないため、距離センサが無い場合には、正解判定精度が著しく落ちるという問題点があった。
【0010】
上記特許文献2では、着座地点までに異常が発生しないことを評価する技術であり、着座の決定方法を改良することについては配慮されていなかった。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
公立大学法人大阪
複合粒子
2か月前
公立大学法人大阪
診断装置
6か月前
公立大学法人大阪
食育システム
1か月前
公立大学法人大阪
介護支援システム
6か月前
公立大学法人大阪
蛍光X線分析装置
6か月前
公立大学法人大阪
尿素化合物の製造方法
7か月前
公立大学法人大阪
測定方法および構造体
4か月前
公立大学法人大阪
プロペラのピッチ変更装置
4か月前
公立大学法人大阪
リン化コバルト炭素複合粒子
8日前
公立大学法人大阪
カルボン酸化合物の製造方法
1か月前
公立大学法人大阪
Trichoderma属菌
1か月前
鹿島建設株式会社
空調システム
6か月前
公立大学法人大阪
変異型アシル-ACPレダクターゼ
15日前
公立大学法人大阪
硫化リチウム-亜硫酸リチウム複合材料
7か月前
公立大学法人大阪
核酸配列編集方法及び核酸配列製造方法
2か月前
公立大学法人大阪
タングステン分別用組成物及びその利用
5か月前
公立大学法人大阪
ドップラーライダー用動揺吸収台の制御方法
7か月前
公立大学法人大阪
ウルトラファインバブル内酸素濃度測定方法
4か月前
公立大学法人大阪
推定システム、推定方法、及び推定プログラム
5か月前
公立大学法人大阪
支援システム、支援方法、及び支援プログラム
1か月前
公立大学法人大阪
半導体素子の観測装置、半導体素子の観測方法
6か月前
国立大学法人金沢大学
異種接合体の分離方法
9か月前
美津濃株式会社
足関節底背屈トレーニング器具
3か月前
公立大学法人大阪
ナノ粒子、DDS用担体、経皮吸収製剤、及び化粧品
7か月前
公立大学法人大阪
光架橋高分子粒子および光架橋高分子粒子の生成方法
3か月前
トヨタ自動車株式会社
活物質、電極合材および電池
2か月前
公立大学法人大阪
過酸化水素付加体、及び、過酸化水素付加体の使用方法
3か月前
公立大学法人大阪
臭化水素付加剤およびそれを用いた臭素化合物の製造方法
5か月前
鹿島建設株式会社
帯水層蓄熱システム及び帯水層蓄熱方法
今日
甲南化工株式会社
アルコール性肝疾患予防又は改善用組成物
2か月前
甲南化工株式会社
アルコール性肝疾患予防又は改善用組成物
2か月前
国立大学法人金沢大学
異種接合体の製造方法及びその分離方法
8か月前
公立大学法人大阪
光硬化性組成物およびその光硬化物ならびに光硬化物の製造方法
7か月前
国立大学法人 東京大学
皮膚微生物叢を制御するための溶菌剤
1か月前
公立大学法人大阪
3次元表示装置、ヘッドアップディスプレイシステム、及び移動体
1か月前
セイコーエプソン株式会社
処理システム、プログラム及び処理方法
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ