TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024113776
公報種別
公開特許公報(A)
公開日
2024-08-23
出願番号
2023018955
出願日
2023-02-10
発明の名称
自己位置推定装置
出願人
株式会社豊田自動織機
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20240816BHJP(制御;調整)
要約
【課題】移動体の自己位置の推定精度を向上させることができる自己位置推定装置を提供する。
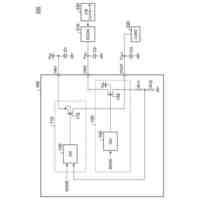
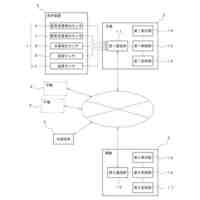
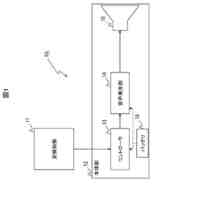
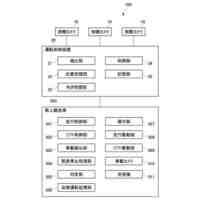
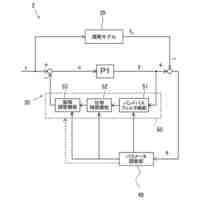
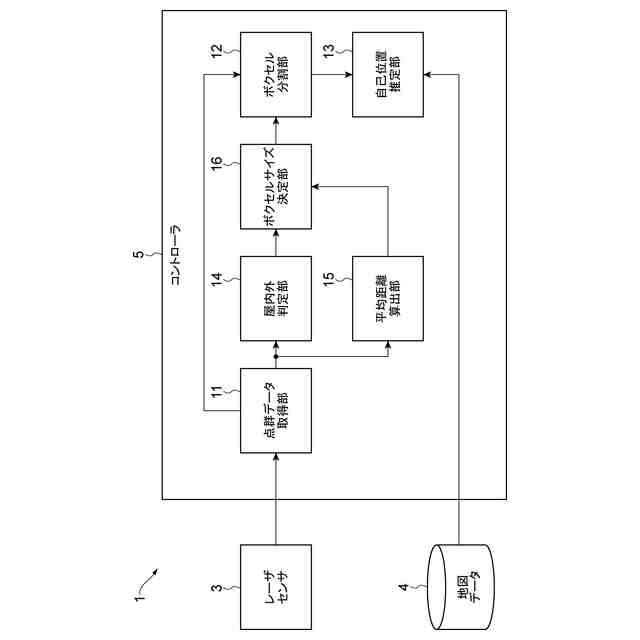
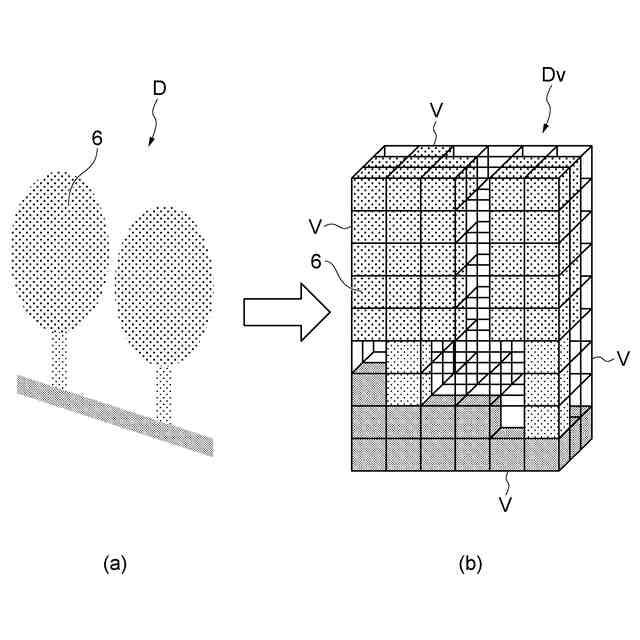
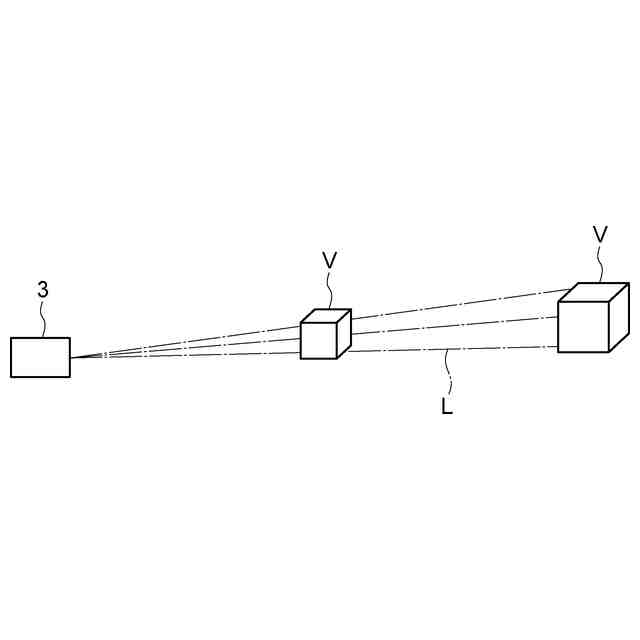
【解決手段】自己位置推定装置1は、移動体2の周囲にレーザLを照射し、レーザLの反射光を受光することにより、移動体2の周囲に存在する物体6を検出し、検出データとしての点群データを出力するレーザセンサ3と、レーザセンサ3の点群データDを複数のボクセルVに分割して、ボクセル単位の点群データDvを生成するボクセル分割部12と、ボクセル単位の点群データDvに基づいて、移動体2の自己位置を推定する自己位置推定部13と、移動体2の周囲の環境状況に応じてボクセルVのグリッドサイズを決定するボクセルサイズ決定部16とを備え、ボクセル分割部12は、レーザセンサ3の点群データDをボクセルサイズ決定部16により決定されたグリッドサイズのボクセルVに分割する。
【選択図】図1
特許請求の範囲
【請求項1】
移動体の自己位置の推定を行う自己位置推定装置において、
前記移動体の周囲にレーザを照射し、レーザの反射光を受光することにより、前記移動体の周囲に存在する物体を検出し、検出データとしての点群データを出力するレーザ物体検出部と、
前記レーザ物体検出部の点群データを複数のボクセルに分割して、ボクセル単位の点群データを生成するボクセル分割部と、
前記ボクセル分割部により生成された前記ボクセル単位の点群データに基づいて、前記移動体の自己位置を推定する自己位置推定部と、
前記移動体の周囲の環境状況に応じて前記ボクセルのグリッドサイズを決定するボクセルサイズ決定部とを備え、
前記ボクセル分割部は、前記レーザ物体検出部の点群データを前記ボクセルサイズ決定部により決定されたグリッドサイズのボクセルに分割する自己位置推定装置。
続きを表示(約 580 文字)
【請求項2】
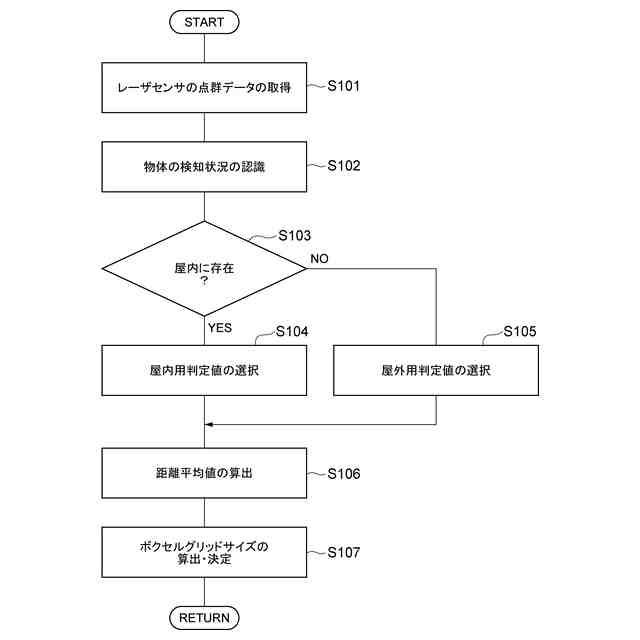
前記移動体が存在する環境が屋内及び屋外の何れであるかを判定する屋内外判定部を更に備え、
前記ボクセルサイズ決定部は、前記屋内外判定部により前記移動体が屋外に存在すると判定されたときは、前記屋内外判定部により前記移動体が屋内に存在すると判定されたときに比べて、前記ボクセルのグリッドサイズを大きくする請求項1記載の自己位置推定装置。
【請求項3】
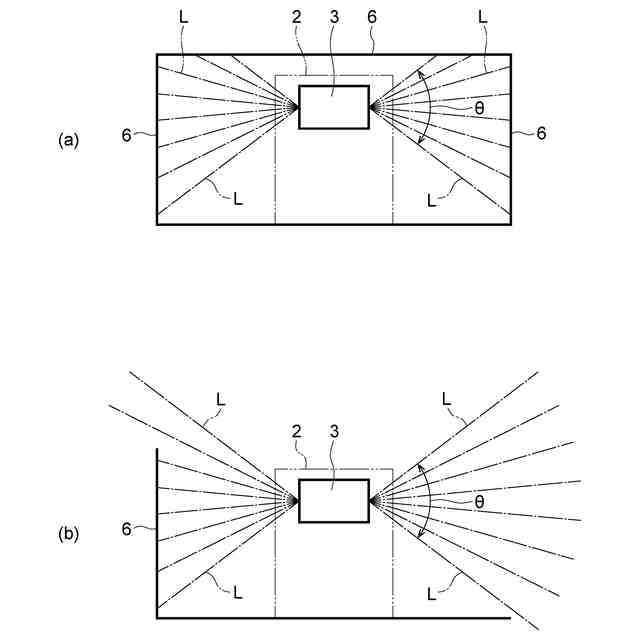
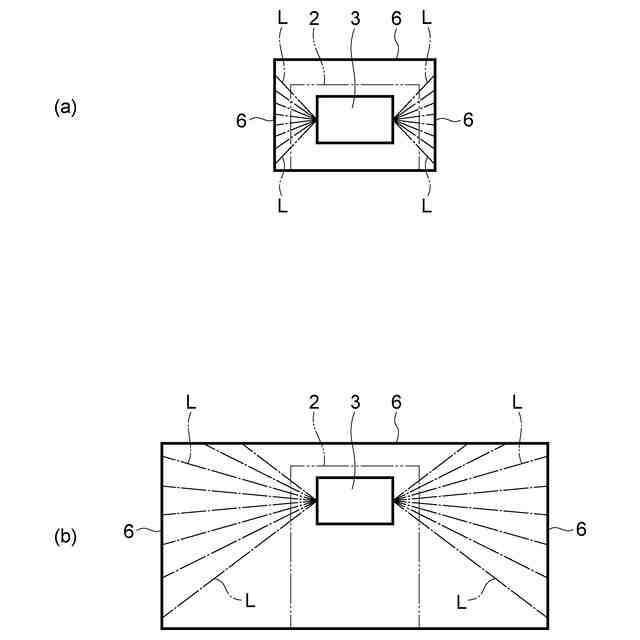
前記屋内外判定部は、前記レーザ物体検出部の点群データにおける特定照射角範囲の点群の有無に基づいて、前記移動体が存在する環境が屋内及び屋外の何れであるかを判定する請求項2記載の自己位置推定装置。
【請求項4】
前記レーザ物体検出部は、前記移動体の周囲に存在する物体までの距離を検出し、
前記ボクセルサイズ決定部は、前記レーザ物体検出部から前記物体までの距離が長くなるほど、前記ボクセルのグリッドサイズを大きくする請求項1~3の何れか一項記載の自己位置推定装置。
【請求項5】
前記レーザ物体検出部から前記物体までの距離の平均値を算出する平均距離算出部を更に備え、
前記ボクセルサイズ決定部は、前記平均距離算出部により算出された前記距離の平均値が長くなるほど、前記ボクセルのグリッドサイズを大きくする請求項4記載の自己位置推定装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自己位置推定装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来の自己位置推定装置としては、例えば特許文献1に記載されているように、記憶部に記憶されたリファレンス点群(地図点群)データとLiDAR等により取得されたクエリ点群(センサ点群)データとを比較し、地図点群とセンサ点群とのボクセルに基づくスキャンマッチングを行うことで、移動体の自己位置を推定する技術が知られている。
【先行技術文献】
【特許文献】
【0003】
特開2019-40445号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
LiDAR等により取得されたセンサ点群データを複数のボクセルに分割して、移動体の自己位置を推定する際には、移動体の周囲環境に適したボクセルサイズ(ボクセルのグリッドサイズ)を設定しないと、自己位置推定の精度の低下を招いてしまう。
【0005】
本発明の目的は、移動体の自己位置の推定精度を向上させることができる自己位置推定装置を提供することである。
【課題を解決するための手段】
【0006】
本発明の一態様は、移動体の自己位置の推定を行う自己位置推定装置において、移動体の周囲にレーザを照射し、レーザの反射光を受光することにより、移動体の周囲に存在する物体を検出し、検出データとしての点群データを出力するレーザ物体検出部と、レーザ物体検出部の点群データを複数のボクセルに分割して、ボクセル単位の点群データを生成するボクセル分割部と、ボクセル分割部により生成されたボクセル単位の点群データに基づいて、移動体の自己位置を推定する自己位置推定部と、移動体の周囲の環境状況に応じてボクセルのグリッドサイズを決定するボクセルサイズ決定部とを備え、ボクセル分割部は、レーザ物体検出部の点群データをボクセルサイズ決定部により決定されたグリッドサイズのボクセルに分割する。
【0007】
このような自己位置推定装置においては、レーザ物体検出部によって、移動体の周囲にレーザを照射し、そのレーザの反射光を受光することにより、移動体の周囲に存在する物体が検出され、点群データが出力される。そして、レーザ物体検出部の点群データが複数のボクセルに分割されて、ボクセル単位の点群データが生成され、そのボクセル単位の点群データに基づいて移動体の自己位置が推定される。このとき、移動体の周囲の環境状況に応じてボクセルのグリッドサイズが決定され、レーザ物体検出部の点群データが当該グリッドサイズのボクセルに分割される。このため、移動体の周囲の環境状況に応じた適切なボクセルサイズが設定されることとなる。これにより、移動体の自己位置の推定精度が向上する。
【0008】
自己位置推定装置は、移動体が存在する環境が屋内及び屋外の何れであるかを判定する屋内外判定部を更に備え、ボクセルサイズ決定部は、屋内外判定部により移動体が屋外に存在すると判定されたときは、屋内外判定部により移動体が屋内に存在すると判定されたときに比べて、ボクセルのグリッドサイズを大きくしてもよい。
【0009】
屋内に存在する物体のサイズは、屋外に存在する物体のサイズに比べて小さいことが多い。そこで、移動体が屋外に存在するときは、移動体が屋内に存在するときに比べて、ボクセルのグリッドサイズを大きくすることにより、移動体が存在する環境が屋内及び屋外の何れであっても、適切なボクセルサイズが設定される。
【0010】
屋内外判定部は、レーザ物体検出部の点群データにおける特定照射角範囲の点群の有無に基づいて、移動体が存在する環境が屋内及び屋外の何れであるかを判定してもよい。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
作業車両
2か月前
エイブリック株式会社
定電圧回路
2か月前
株式会社FUJI
工作機械
21日前
井関農機株式会社
作業車両
2か月前
エイブリック株式会社
基準電流回路
1か月前
ローム株式会社
電源回路
2か月前
井関農機株式会社
自立走行農作業車
2か月前
トヨタ自動車株式会社
移動システム
2か月前
トヨタ自動車株式会社
制御システム
1か月前
日昌電気制御株式会社
管理システム
1か月前
株式会社ユタカ
半自動切換装置
1か月前
トヨタ自動車株式会社
設備の制御方法
2か月前
トヨタ自動車株式会社
マーカースタンド
1か月前
井関農機株式会社
作業車両の作業管理システム
2か月前
株式会社ダイフク
搬送設備
20日前
株式会社豊田自動織機
自律走行車両
1か月前
横河電機株式会社
電流源回路
2か月前
住友重機械工業株式会社
自律走行台車
2か月前
株式会社フカデン
外周部加工システム
9日前
大阪瓦斯株式会社
二次圧制御機構
16日前
ミツミ電機株式会社
半導体集積回路装置
1か月前
大阪瓦斯株式会社
二次圧制御機構
16日前
個人
ペダル操作検知装置
2か月前
日立建機株式会社
自律走行システム
13日前
三菱電機株式会社
管理システムおよび管理方法
2か月前
株式会社デンソー
移動体制御装置
6日前
横河電機株式会社
電圧電流変換回路
1か月前
アズビル株式会社
パラメータ探索装置および方法
2か月前
株式会社デンソー
車両用電子制御装置
1か月前
エンゼルグループ株式会社
無人搬送システム
1か月前
ニチコン株式会社
電源装置
1か月前
株式会社ダイフク
搬送設備の検査装置
16日前
トヨタ自動車株式会社
充電装置
2か月前
シンフォニアテクノロジー株式会社
共振抑制制御装置
1か月前
シンフォニアテクノロジー株式会社
共振抑制制御装置
1か月前
株式会社FUJI
工作機械
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ