TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024110160
公報種別
公開特許公報(A)
公開日
2024-08-15
出願番号
2023014564
出願日
2023-02-02
発明の名称
位置調整方法、位置調整システム及びピッキング制御システム
出願人
興和株式会社
代理人
個人
,
個人
主分類
B25J
13/08 20060101AFI20240807BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
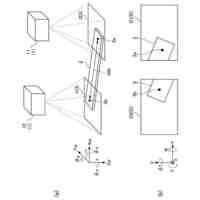
【課題】ロボットに付随した2次元カメラと撮影対象物との相対的位置関係を補正するためのマーカーの一部が撮影範囲に含まれていない場合に、残りのマーカーを撮影範囲内含ませるための2次元カメラの位置調整を行うための位置調整方法を提供すること。
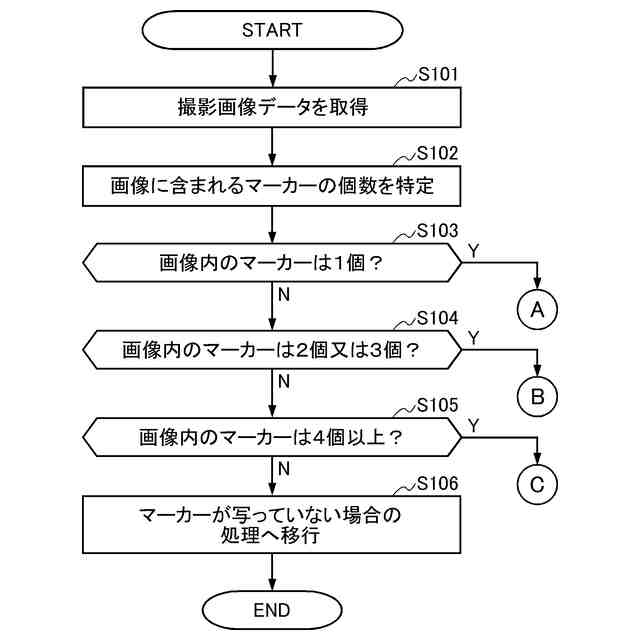
【解決手段】2次元カメラによって撮影対象物を撮影した撮影画像データを取得し、撮影画像データが示す画像に含まれるマーカーの個数を特定し、撮影対象物に設けるマーカーの個数として予め定めた上限値(以下、マーカー上限個数)の情報を用いて、特定したマーカーの個数がマーカー上限個数に達しているかを判定し、マーカーの個数がマーカー上限個数に満たないと判定された場合に、撮像画像データが示す画像内でのマーカーの識別記号を利用して、撮像画像データが示す画像に写っていなかった残りのマーカーを2次元カメラの撮影範囲内に収めるための2次元カメラの移動に関する制御内容を決定する。
【選択図】図12
特許請求の範囲
【請求項1】
2次元撮影を行うための2次元カメラを備え、2次元カメラのカメラ位置を制御し得る構造を備えたロボットと、
前記ロボットの動作を制御する制御装置と、
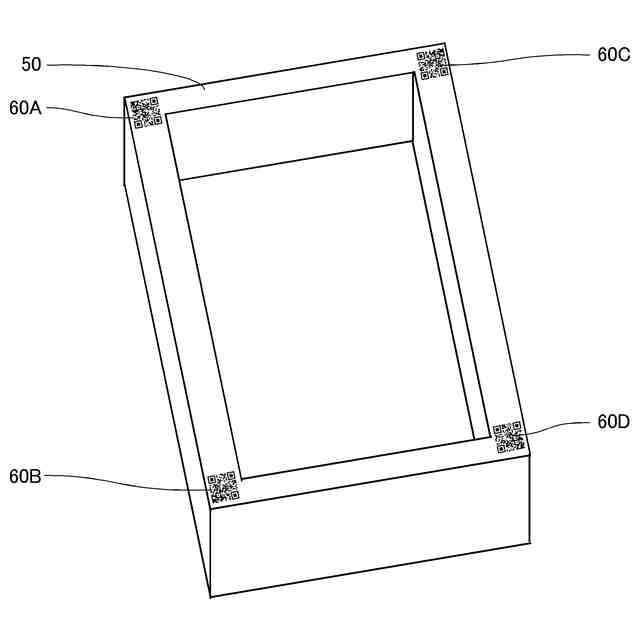
前記2次元カメラによる撮影対象であり所定の識別記号を有した複数個のマーカーを備えた撮影対象物と
を備えた環境における位置調整方法であって、
前記2次元カメラによって前記撮影対象物を撮影した撮影画像データを取得する撮影画像データ取得手順と、
前記撮影画像データが示す画像に含まれる前記マーカーの個数を特定する個数特定手順と、
前記撮影対象物に設ける前記マーカーの個数として予め定めた上限値(以下、マーカー上限個数)の情報を用いて、前記個数特定手順で特定した前記マーカーの個数が前記マーカー上限個数に達しているかを判定する個数判定手順と、
前記マーカーの個数が前記マーカー上限個数に満たないと判定された場合に、前記撮像画像データが示す画像内での前記マーカーの識別記号を利用して、前記撮像画像データが示す画像に写っていなかった残りの前記マーカーを2次元カメラの撮影範囲内に収めるための前記2次元カメラの移動に関する制御内容を決定する制御内容決定手順と
を含む位置調整方法。
続きを表示(約 2,600 文字)
【請求項2】
前記マーカーは、自身の座標情報と前記撮影対象物に同時に設けられる他の全てのマーカーそれぞれの座標情報を取得するための情報をコード化して記述したものを前記識別記号として採用しているものとし、
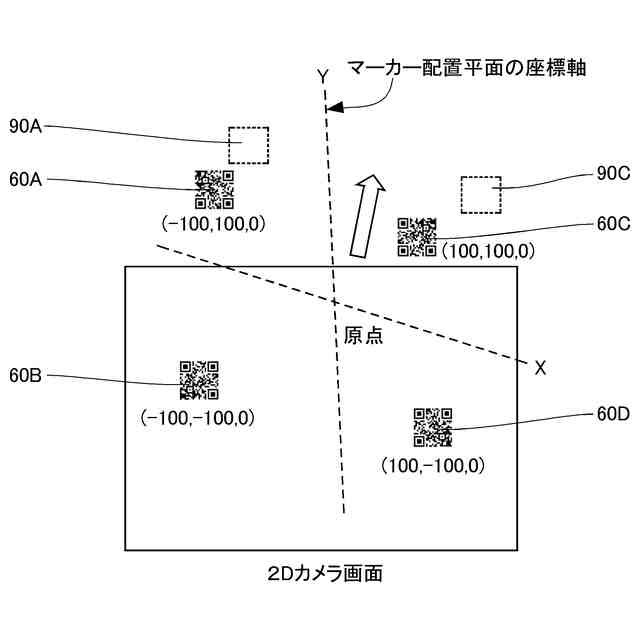
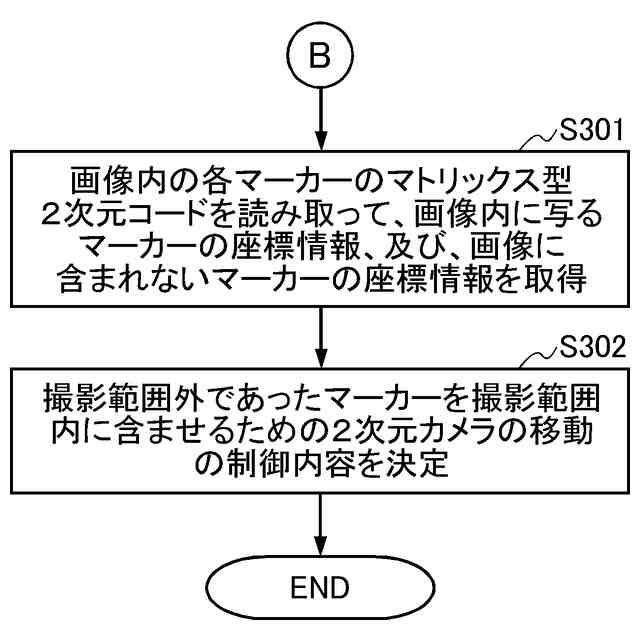
前記制御内容決定手順では、前記マーカーの個数が前記マーカー上限個数に満たないと判定された場合に、前記撮像画像データが示す画像内での前記マーカーの識別記号を読み取ることで、前記撮影画像データの撮影範囲に含まれる前記マーカーの座標情報、及び、撮影範囲に含まれない前記マーカーの座標情報を取得し、撮影範囲に含まれない前記マーカーが撮影範囲内に含まれるように前記2次元カメラの移動の制御内容を決定する
請求項1記載の位置調整方法。
【請求項3】
前記マーカーは、マトリクス型2次元コードによって必要な情報をコード化して記述した前記識別記号である
請求項2記載の位置調整方法。
【請求項4】
前記マーカーは、前記撮影対象物における所定位置を指し示す方向指示機能を前記識別記号によって実現しているものとし、
前記制御内容決定手順では、前記マーカーの個数が前記マーカー上限個数に満たないと判定された場合に、前記撮像画像データが示す画像内での前記マーカーの識別記号を読み取ることで、前記撮影対象物における前記所定位置の情報を取得し、前記所定位置の情報を用いて前記2次元カメラの移動の制御内容を決定する
請求項1記載の位置調整方法。
【請求項5】
前記マーカーは、マトリクス型2次元コードによって必要な情報をコード化して記述した前記識別記号であり、
前記マトリクス型2次元コードが備えるファインダパターンの配置に基づいて前記撮影対象物における所定位置を指し示す方向指示機能を実現する
請求項4記載の位置調整方法。
【請求項6】
ピッキング対象物を2次元撮影するための2次元カメラ及び前記ピッキング対象物をピッキングするハンド部を備え、任意の作業場所でピッキング作業を実行するピッキングロボットと、
前記ピッキングロボットのピッキング動作を制御する制御装置と、
前記ピッキング対象物の移載元又は前記ピッキング対象物の移載先であり、前記ピッキング対象物を収容する箇所、及び、所定の識別記号を有した複数個のマーカーを備えた搬送器具と
を備えたピッキング制御システムにおける位置調整方法であって、
前記2次元カメラによって前記搬送器具を撮影した撮影画像データを取得する撮影画像データ取得手順と、
前記撮影画像データが示す画像に含まれる前記マーカーの個数を特定する個数特定手順と、
前記搬送器具に設ける前記マーカーの個数として予め定めた上限値(以下、マーカー上限個数)の情報を用いて、前記個数特定手順で特定した前記マーカーの個数が前記マーカー上限個数に達しているかを判定する個数判定手順と、
前記マーカーの個数が前記マーカー上限個数に満たないと判定された場合に、前記撮像画像データが示す画像内での前記マーカーの識別記号を利用して、前記撮像画像データが示す画像に写っていなかった残りの前記マーカーを2次元カメラの撮影範囲内に収めるための前記2次元カメラの移動に関する制御内容を決定する制御内容決定手順と
を含むピッキング制御システムにおける位置調整方法。
【請求項7】
2次元撮影を行うための2次元カメラを備え、2次元カメラのカメラ位置を制御し得る構造を備えたロボットと、
前記ロボットの動作を制御する制御装置と、
前記2次元カメラによる撮影対象であり所定の識別記号を有した複数個のマーカーを備えた撮影対象物と
を備えた位置調整システムであって、
前記制御装置において、
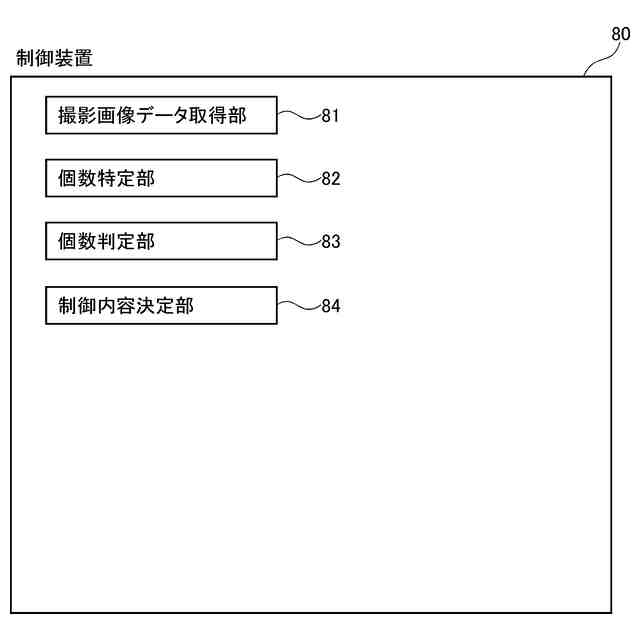
前記2次元カメラによって前記撮影対象物を撮影した撮影画像データを取得する撮影画像データ取得手段と、
前記撮影画像データが示す画像に含まれる前記マーカーの個数を特定する個数特定手段と、
前記撮影対象物に設ける前記マーカーの個数として予め定めた上限値(以下、マーカー上限個数)の情報を用いて、前記個数特定手段で特定した前記マーカーの個数が前記マーカー上限個数に達しているかを判定する個数判定手段と、
前記マーカーの個数が前記マーカー上限個数に満たないと判定された場合に、前記撮像画像データが示す画像内での前記マーカーの識別記号を利用して、前記撮像画像データが示す画像に写っていなかった残りの前記マーカーを2次元カメラの撮影範囲内に収めるための前記2次元カメラの移動に関する制御内容を決定する制御内容決定手段と
を備える位置調整システム。
【請求項8】
ピッキング対象物を2次元撮影するための2次元カメラ及び前記ピッキング対象物をピッキングするハンド部を備え、任意の作業場所でピッキング作業を実行するピッキングロボットと、
前記ピッキングロボットのピッキング動作を制御する制御装置と、
前記ピッキング対象物の移載元又は前記ピッキング対象物の移載先であり、前記ピッキング対象物を収容する箇所、及び、所定の識別記号を有した複数個のマーカーを備えた搬送器具と
を備えたピッキング制御システムであって、
前記制御装置において、
前記2次元カメラによって前記搬送器具を撮影した撮影画像データを取得する撮影画像データ取得手段と、
前記撮影画像データが示す画像に含まれる前記マーカーの個数を特定する個数特定手段と、
前記搬送器具に設ける前記マーカーの個数として予め定めた上限値(以下、マーカー上限個数)の情報を用いて、前記個数特定手段で特定した前記マーカーの個数が前記マーカー上限個数に達しているかを判定する個数判定手段と、
前記マーカーの個数が前記マーカー上限個数に満たないと判定された場合に、前記撮像画像データが示す画像内での前記マーカーの識別記号を利用して、前記撮像画像データが示す画像に写っていなかった残りの前記マーカーを2次元カメラの撮影範囲内に収めるための前記2次元カメラの移動に関する制御内容を決定する制御内容決定手段と
を備えるピッキング制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、マトリックス型2次元コードからなるマーカーを利用したピッキング制御システムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来から、工場からの出荷段階や物流拠点などにおいて、荷物の仕分け、積み替え、荷卸しなどの作業をロボットによって自動化することが行われてきた。そして、そのような自動化されたロボットの適用例として、無人搬送車にロボットを搭載し、複数の離れた場所にロボットを移動させた上で作業を実行させる場合がある。
【0003】
ここで、無人搬送車搭載ロボットの位置補正方法に関する文献として、例えば、特許文献1が既に提案されている。この特許文献1には、ワークを載せた作業台7の隅に2点のマーク(8a、8b)を設け、2点のマークを基準として、教示時のマーク位置と実際に作業位置に停止したときのマークの位置に基づいてハンドの位置のずれ及びワークに対するハンドの方向を補正する構成が開示されている。
【先行技術文献】
【特許文献】
【0004】
特公平08-009151号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
AGV(Automatic Guided Vehicle:無人搬送車)やAMR(Autonomous Mobile Robot:自律走行搬送ロボット)によって任意の作業場所に搬送された上でピッキング作業を実行するピッキングロボットが存在する。AGVやAMRを自律走行させるためのアルゴリズムは様々であるが、実際の環境下において制御内容とのずれが生じることがあり得る。そのため、自らもAGVやAMRによって搬送されてきたピッキングロボットとピッキング対象物が収容されたカゴ状物との相対的位置関係が一定とはならず、都度相対的位置関係を把握してから動作の制御を行う必要があるという問題があった。
【0006】
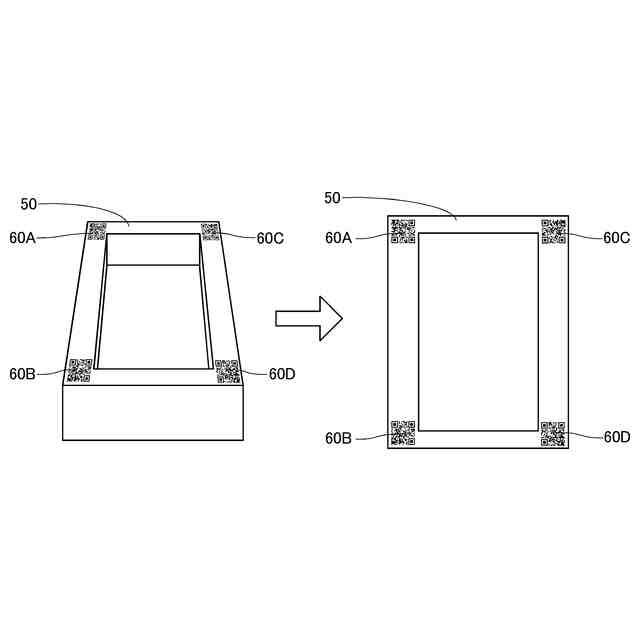
上記特許文献1によれば相対的位置関係がずれる問題を解決可能であるが、ずれ補正の基準として用いる複数のマーカーのうちの一部が最初に撮影した撮影画像データの撮影範囲内に含まれないという状況が起こり得る。一例としては、撮影方向がずれている場合、撮影対象にズームし過ぎているために撮影範囲が狭くなっている場合などが考えられる。基準として用いる複数のマーカーのうちの一部が撮影範囲内に含まれていない撮影画像データでは、相対的位置関係のずれ補正が行えないという問題が生じてしまう。
【0007】
本発明は、上記問題点に鑑みなされたものであり、ロボットに付随した2次元カメラと撮影対象物との相対的位置関係を補正するためのマーカーの一部が撮影範囲に含まれていない場合に、含まれていない残りのマーカーを撮影範囲内含ませるための2次元カメラの位置調整を行うための位置調整方法、位置調整システム及びピッキング制御システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明に係る位置調整方法は、2次元撮影を行うための2次元カメラを備え、2次元カメラのカメラ位置を制御し得る構造を備えたロボットと、前記ロボットの動作を制御する制御装置と、前記2次元カメラによる撮影対象であり所定の識別記号を有した複数個のマーカーを備えた撮影対象物とを備えた環境における位置調整方法であって、前記2次元カメラによって前記撮影対象物を撮影した撮影画像データを取得する撮影画像データ取得手順と、前記撮影画像データが示す画像に含まれる前記マーカーの個数を特定する個数特定手順と、前記撮影対象物に設ける前記マーカーの個数として予め定めた上限値(以下、マーカー上限個数)の情報を用いて、前記個数特定手順で特定した前記マーカーの個数が前記マーカー上限個数に達しているかを判定する個数判定手順と、前記マーカーの個数が前記マーカー上限個数に満たないと判定された場合に、前記撮像画像データが示す画像内での前記マーカーの識別記号を利用して、前記撮像画像データが示す画像に写っていなかった残りの前記マーカーを2次元カメラの撮影範囲内に収めるための前記2次元カメラの移動に関する制御内容を決定する制御内容決定手順とを含むことを特徴とする。
【0009】
また、本発明に係る位置調整方法において、さらに、前記マーカーは、自身の座標情報と前記撮影対象物に同時に設けられる他の全てのマーカーそれぞれの座標情報を取得するための情報をコード化して記述したものを前記識別記号として採用しているものとし、前記制御内容決定手順では、前記マーカーの個数が前記マーカー上限個数に満たないと判定された場合に、前記撮像画像データが示す画像内での前記マーカーの識別記号を読み取ることで、前記撮影画像データの撮影範囲に含まれる前記マーカーの座標情報、及び、撮影範囲に含まれない前記マーカーの座標情報を取得し、撮影範囲に含まれない前記マーカーが撮影範囲内に含まれるように前記2次元カメラの移動の制御内容を決定することを特徴とする。
【0010】
また、本発明に係る位置調整方法において、さらに、前記マーカーは、マトリクス型2次元コードによって必要な情報をコード化して記述した前記識別記号であることを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
興和株式会社
医薬品
21日前
興和株式会社
医薬組成物
2か月前
興和株式会社
医薬組成物
2か月前
興和株式会社
光学設計方法、及び回折光学素子
2か月前
興和株式会社
医薬品
5日前
興和株式会社
医薬品
1か月前
興和株式会社
組成物
2か月前
興和株式会社
把握方法
1か月前
興和株式会社
水性組成物
1か月前
興和株式会社
位置調整方法、位置調整システム及びピッキング制御システム
1か月前
興和株式会社
組成物(に)
1か月前
興和株式会社
水性組成物その陸
1か月前
興和株式会社
トウガラシ含有医薬組成物(ご)
2か月前
個人
木製ハンマー
28日前
個人
関節モジュール
15日前
個人
寸切りボルト回し
11日前
個人
スロットルトリガー
25日前
日東精工株式会社
搬送装置
5か月前
中国電力株式会社
腰袋
3か月前
株式会社ツノダ
挟持工具
5か月前
コクヨ株式会社
補助器具
5日前
株式会社ツノダ
挟持工具
7か月前
川崎重工業株式会社
ハンド
7か月前
株式会社右川ゴム製造所
把持装置
5か月前
日東工器株式会社
衝撃工具
2か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
個人
メンテナンス用スタンド
2か月前
川崎重工業株式会社
罫書用治具
3か月前
CKD株式会社
把持装置
25日前
株式会社マキタ
動力工具
3か月前
学校法人立命館
グリッパ
18日前
オムロン株式会社
電動把持工具
4日前
学校法人立命館
ロボットハンド
6か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ