TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024102120
公報種別
公開特許公報(A)
公開日
2024-07-30
出願番号
2024067935,2021045017
出願日
2024-04-19,2021-03-18
発明の名称
作業機
出願人
株式会社クボタ
代理人
安田岡本弁理士法人
主分類
E02F
9/22 20060101AFI20240723BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機の走行に応じてスムーズに減速を行うことができるようにする。
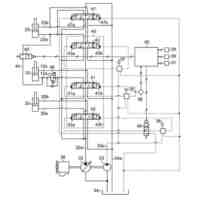
【解決手段】作業機は、機体の左側に設けられた左走行装置に動力を伝達可能な左走行モータの第1回転数、及び機体の右側に設けられた右走行装置に動力を伝達可能な右走行モータの第2回転数を、所定の高速域である第2速度から所定の低速域である第1速度に自動的に減速する自動減速を行う制御装置を備え、前記制御装置は、前記第1回転数及び前記第2回転数のいずれかが所定回転数以上である場合、前記自動減速を行わない。
【選択図】図1
特許請求の範囲
【請求項1】
機体と、
前記機体の左側に設けられた左走行装置と、
前記機体の右側に設けられた右走行装置と、
前記左走行装置に動力を伝達可能な左走行モータと、
前記右走行装置に動力を伝達可能な右走行モータと、
前記左走行モータの第1回転数を検出する第1回転検出装置と、
前記右走行モータの第2回転数を検出する第2回転検出装置と、
前記左走行モータに作動油を供給する左走行ポンプと、
前記右走行モータに作動油を供給する右走行ポンプと、
前記第1回転数及び前記第2回転数が高速側の第2速度である場合に、前記第1回転数及び前記第2回転数を前記第2速度から低速側の第1速度に自動的に減速する自動減速を行う制御装置と、を備え、
前記制御装置は、前記第1回転数及び前記第2回転数のいずれかが所定回転数以上である場合、前記自動減速を行わない作業機。
続きを表示(約 1,600 文字)
【請求項2】
前記左走行ポンプ及び前記右走行ポンプのうち少なくとも一方の操作を行う走行操作装置を備え、
前記制御装置は、前記走行操作装置が前記機体を前進させる方向に操作され且つ、前記左走行モータ及び前記右走行モータが前記機体の後進に対応する方向に回転している場合、前記自動減速を行わない請求項1に記載の作業機。
【請求項3】
パイロット油を吐出する油圧ポンプと、
前記左走行ポンプ及び前記右走行ポンプがそれぞれ有する複数の受圧部に接続された複数の走行油路と、
前記左走行ポンプ及び前記右走行ポンプのうち少なくとも一方の操作を行う走行操作装置と、を備え、
前記走行操作装置は、前記左走行ポンプ及び前記右走行ポンプがそれぞれ有する斜板の角度を変更するために操作され、当該操作に応じて複数の前記走行油路にそれぞれ出力する前記パイロット油の圧力であるパイロット圧を変化させ、
前記制御装置は、複数の前記走行油路のそれぞれの前記パイロット圧に基づいて、前記走行操作装置の操作方向を判断し、当該操作方向が前記機体の左方向又は右方向への信地旋回に対応する方向であると判断した場合に、前記自動減速を行う請求項1又は2に記載の作業機。
【請求項4】
パイロット油を吐出する油圧ポンプと、
前記左走行ポンプ及び前記右走行ポンプがそれぞれ有する複数の受圧部に接続された複数の走行油路と、
前記左走行ポンプ及び前記右走行ポンプのうち少なくとも一方の操作を行う走行操作装置と、を備え、
前記制御装置は、前記走行操作装置の操作方向が前記機体の左方向又は右方向への超信地旋回に対応する方向であると判断した場合に、前記自動減速を行う請求項1~3のいずれかに記載の作業機。
【請求項5】
パイロット油を吐出する油圧ポンプと、
前記左走行ポンプ及び前記右走行ポンプがそれぞれ有する複数の受圧部に接続された複数の走行油路と、
前記左走行ポンプ及び前記右走行ポンプのうち少なくとも一方の操作を行う走行操作装置と、を備え、
前記走行操作装置は、
揺動操作される走行操作部材と、
前記走行操作部材の操作状態に応じて作動して、複数の前記走行油路にそれぞれ出力する前記パイロット油の圧力であるパイロット圧を変化させる複数の操作弁と、を有し、
複数の前記走行油路から前記左走行ポンプ及び前記右走行ポンプの複数の前記受圧部にそれぞれ作用する前記パイロット圧が変化することで、前記左走行ポンプ及び前記右走行ポンプがそれぞれ有する斜板の角度が変更されて、前記左走行モータ及び前記右走行モータの回転方向と回転数とが変化する請求項1~4のいずれかに記載の作業機。
【請求項6】
前記走行操作装置は、複数の前記走行油路にそれぞれ接続され、且つ複数の前記操作弁のうちのいずれか2つの操作弁にそれぞれ接続された複数の高圧選択弁を有し、
複数の前記高圧選択弁は、接続された2つの前記操作弁から出力された前記パイロット圧のうち、高い方のパイロット圧を接続された前記走行油路に出力する請求項5に記載の作業機。
【請求項7】
前記左走行モータ及び前記右走行モータに供給される前記作動油の圧力を検出する圧力検出装置を備え、
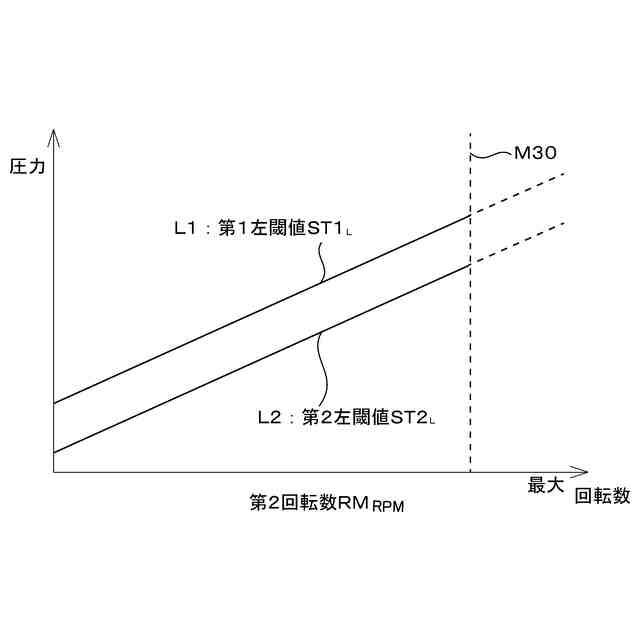
前記制御装置は、前記圧力検出装置により検出された前記作動油の圧力と所定の閾値とに基づいて前記自動減速を行うか否かを判断する請求項1~6のいずれかに記載の作業機。
【請求項8】
前記制御装置は、前記第1回転数及び前記第2回転数に基づいて前記閾値を設定する請求項7に記載の作業機。
【請求項9】
前記制御装置は、前記第1回転数及び前記第2回転数が大きくなるにつれて、前記閾値を低く設定する請求項8に記載の作業機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、例えば、スキッドステアローダ、コンパクトトラックローダ、バックホー等の作業機に関するものである。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、作業機において減速及び増速を行う技術として特許文献1に示されているものがある。特許文献1の作業機は、エンジンを含む原動機と、原動機の動力により作動し且つ、作動油を吐出する油圧ポンプと、作動油の圧力に応じて第1速度と、第1速度よりも高速である第2速度とに速度が変更可能な走行油圧装置と、走行油圧装置に作用する作動油の圧力を変更可能な作動弁と、作動油の圧力を検出可能な測定装置と、を備え、作動弁は、測定装置から検出された作動油の圧力である検出圧力が、第2速度に対応する設定圧から所定圧以下に低下した場合に、走行油圧装置に作用する作動油の圧力を減圧して、走行油圧装置を第1速度に減速している。
【先行技術文献】
【特許文献】
【0003】
特開2017-179923号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の作業機では、走行中に走行装置に供給される作動油の圧力が所定圧以上である場合に、第2速度から第1速度に自動減速することができる。しかしながら、作業機(走行装置)の走行状態(超信地旋回、信地旋回、直進)によって、不用意に減速をしてしまうことがある。
【0005】
本発明は、上記したような従来技術の問題点を解決すべくなされたものであって、作業機の走行に応じてスムーズに減速を行うことができる作業機を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記技術的課題を解決するために本発明が講じた技術的手段は、以下の通りである。
作業機は、機体と、前記機体の左側に設けられた左走行装置と、前記機体の右側に設けられた右走行装置と、前記左走行装置に動力を伝達可能な左走行モータと、前記右走行装置に動力を伝達可能な右走行モータと、前記左走行モータの第1回転数を検出する第1回転検出装置と、前記右走行モータの第2回転数を検出する第2回転検出装置と、前記左走行モータに作動油を供給する左走行ポンプと、前記右走行モータに作動油を供給する右走行ポンプと、前記第1回転数及び前記第2回転数が高速側の第2速度である場合に、前記第1回転数及び前記第2回転数を前記第2速度から低速側の第1速度に自動的に減速する自動減速を行う制御装置と、を備え、前記制御装置は、前記第1回転数及び前記第2回転数のいずれかが所定回転数以上である場合、前記自動減速を行わない。
【0007】
前記作業機は、前記左走行ポンプ及び前記右走行ポンプのうち少なくとも一方の操作を行う走行操作装置を備え、前記制御装置は、前記走行操作装置が前記機体を前進させる方向に操作され且つ、前記左走行モータ及び前記右走行モータが前記機体の後進に対応する方向に回転している場合、前記自動減速を行わない。
【0008】
前記作業機は、パイロット油を吐出する油圧ポンプと、前記左走行ポンプ及び前記右走行ポンプがそれぞれ有する複数の受圧部に接続された複数の走行油路と、を備え、前記走行操作装置は、前記左走行ポンプ及び前記右走行ポンプがそれぞれ有する斜板の角度を変更するために操作され、当該操作に応じて複数の前記走行油路にそれぞれ出力する前記パイロット油の圧力であるパイロット圧を変化させ、前記制御装置は、複数の前記走行油路のそれぞれの前記パイロット圧に基づいて、前記走行操作装置の操作方向を判断し、当該操作方向が前記機体の左方向又は右方向への信地旋回に対応する方向であると判断した場合に、前記自動減速を行う。
また、前記制御装置は、前記走行操作装置の操作方向が前記機体の左方向又は右方向への超信地旋回に対応する方向であると判断した場合に、前記自動減速を行う。
【0009】
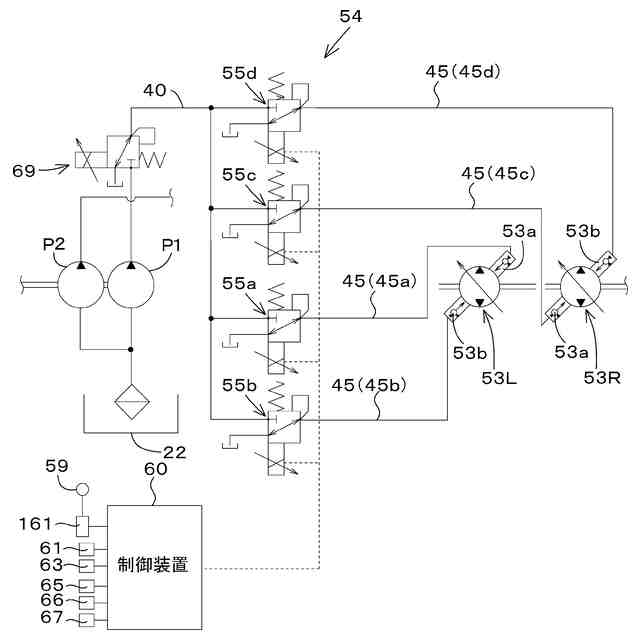
前記走行操作装置は、揺動操作される走行操作部材と、前記走行操作部材の操作状態に応じて作動して、複数の前記走行油路にそれぞれ出力する前記パイロット油の圧力であるパイロット圧を変化させる複数の操作弁と、を有し、複数の前記走行油路から前記左走行ポンプ及び前記右走行ポンプの複数の前記受圧部にそれぞれ作用する前記パイロット圧が変化することで、前記左走行ポンプ及び前記右走行ポンプがそれぞれ有する斜板の角度が変更されて、前記左走行モータ及び前記右走行モータの回転方向と回転数とが変化する。
【0010】
前記走行操作装置は、複数の前記走行油路にそれぞれ接続され、且つ複数の前記操作弁のうちのいずれか2つの操作弁にそれぞれ接続された複数の高圧選択弁を有し、複数の前記高圧選択弁は、接続された2つの前記操作弁から出力された前記パイロット圧のうち、高い方のパイロット圧を接続された前記走行油路に出力する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
倉庫システム
今日
株式会社クボタ
電動作業車
4日前
株式会社クボタ
歪み領域推定装置、歪み領域推定方法、機械学習装置、及び機械学習方法
今日
生企工営株式会社
ツース盤
11日前
個人
回転埋設先端拡大翼杭
17日前
株式会社パルパルス
環境保全資材
10日前
日本車輌製造株式会社
杭打機
今日
株式会社トラバース
拡底型の鋼管杭
4日前
日立建機株式会社
作業車両
19日前
株式会社N-Seed
吹付工法
19日前
住友重機械工業株式会社
ショベル
13日前
住友重機械工業株式会社
ショベル
18日前
日立建機株式会社
深礎掘削機
7日前
株式会社丸島アクアシステム
除塵装置
4日前
SUS株式会社
ユニットハウス用基礎
7日前
西部電機株式会社
水門開閉装置
17日前
大成建設株式会社
基礎構造
19日前
大和ハウス工業株式会社
スラブ構築方法
3日前
西松建設株式会社
作業機械及び操縦方法
17日前
鹿島建設株式会社
キャップおよび種子よけ構造
14日前
日立建機株式会社
建設機械
4日前
日本建設技術株式会社
盛土造成構造
10日前
日立建機株式会社
建設機械
5日前
有限会社キシムラ
防砂シート敷設構造
4日前
日本ソリッド株式会社
新規なタイヤ衝撃吸収材の装着方法
10日前
ヤンマーホールディングス株式会社
作業機械
17日前
ヤンマーホールディングス株式会社
作業機械
17日前
日立建機株式会社
作業機械
10日前
学校法人常翔学園
水位検出システム及び水位検出方法
7日前
コベルコ建機株式会社
建設機械の旋回フレーム
7日前
株式会社大林組
建替え工法
3日前
ヤンマーホールディングス株式会社
アーム支持構造
17日前
ヤンマーホールディングス株式会社
作業機械
10日前
コベルコ建機株式会社
建設機械のバッテリ固定構造
4日前
ジェコス株式会社
飛散防止装置
3日前
株式会社小松製作所
作業機械
18日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ