TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024099094
公報種別
公開特許公報(A)
公開日
2024-07-25
出願番号
2023002785
出願日
2023-01-12
発明の名称
制御装置、及び制御方法
出願人
オムロン株式会社
代理人
弁理士法人秀和特許事務所
主分類
G06N
20/00 20190101AFI20240718BHJP(計算;計数)
要約
【課題】制御対象である生産装置等を停止することなく学習済みモデルの更新を行い、学習済みの結果に基づいて後の制御処理を変更する場合でもその変更後における生産装置等の作動の遅延を抑制することを可能とする制御装置、及び制御方法を提供する。
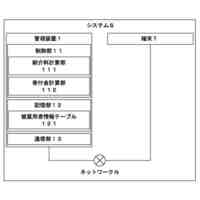
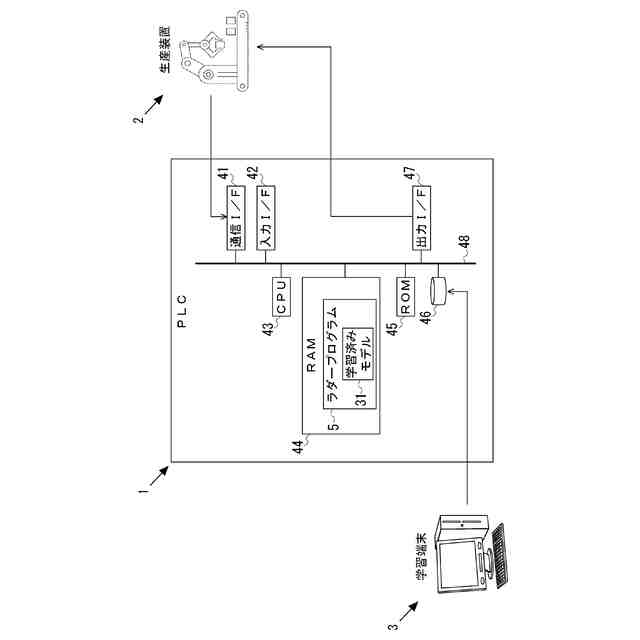
【解決手段】制御対象の状態に応じて当該制御対象の動作を制御する制御装置は、制御対象の状態に関連するデータに基づいて、学習済みモデルを用いた所定の演算処理を実行し、制御対象の状態に係る判定結果を推論する推論部と、推論された判定結果に基づき、制御対象の動作の制御処理に係る指令値を決定する後制御処理部と、を有し、推論部、及び後制御処理部は、学習済みモデルが実装された一連の制御プログラムに基づいて作動し、制御プログラムの実行中に学習済みモデルを更新する更新部をさらに有する。
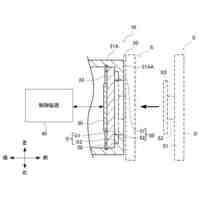
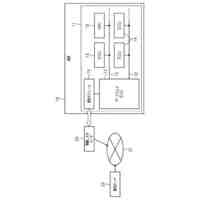
【選択図】図3
特許請求の範囲
【請求項1】
制御対象の状態に応じて当該制御対象の動作を制御する制御装置であって、
前記制御対象の状態に関連するデータに基づいて、学習済みモデルを用いた所定の演算処理を実行し、前記制御対象の状態に係る判定結果を推論する推論部と、
前記推論部が推論した前記判定結果に基づき、前記制御対象の動作の制御処理に係る指令値を決定する後制御処理部と、
を有し、
前記推論部、及び前記後制御処理部は、前記学習済みモデルが実装された一連の制御プログラムに基づいて作動し、
前記制御プログラムの実行中に前記学習済みモデルを更新する更新部をさらに有することを特徴とする、制御装置。
続きを表示(約 1,100 文字)
【請求項2】
前記データを前記制御プログラムに入力する入力部と、
前記入力部が入力した前記データに対して、前記学習済みモデルが読み取り可能となる処理を実行する前制御処理部と、
前記後制御処理部が決定した前記指令値を、前記制御対象に対して出力する出力部と、をさらに有し、
前記前制御処理部、前記推論部、及び前記後制御処理部は、前記制御プログラムに基づいて作動することを特徴とする、請求項1に記載の制御装置。
【請求項3】
前記制御プログラムは、ラダープログラムであることを特徴とする、請求項1に記載の制御装置。
【請求項4】
前記制御対象は、生産装置であることを特徴とする、請求項1に記載の制御装置。
【請求項5】
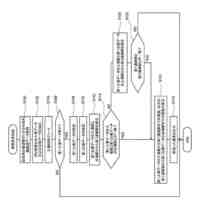
前記学習済みモデルは、複数の層から構成される前記制御プログラムに実装されており、当該複数の層の各々において、前記所定の演算処理が実行され、
前記制御プログラムにおける複数の層は、一または二以上の層からなる複数の層群に分割され、
前記複数の層群は、前段の層群と、複数の後段の層群を含み、
前記前段の層群における演算結果に基づいて、実行されるべき後段の層群が切り替えられることを特徴とする、請求項1に記載の制御装置。
【請求項6】
前記学習済みモデルは、前記制御プログラムのアイドルタイムにおいて更新されることを特徴とする、請求項1に記載の制御装置。
【請求項7】
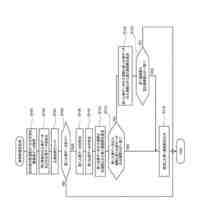
前記後制御処理部は、前記制御対象の動作の制御処理に係る指令値を決定する後制御処理を複数実行し、
前記推論部が推論した前記判定結果に基づき、前記複数の後制御処理のうち、実行されるべき後制御処理が切り替えられることを特徴とする、請求項1に記載の制御装置。
【請求項8】
制御対象の状態に応じて当該制御対象の動作を制御する制御方法であって、
前記制御対象の状態に関連するデータに基づいて、学習済みモデルを用いた所定の演算処理を実行し、前記制御対象の動作の制御に係る判定結果を推論する推論工程と、
前記推論工程において推論された前記判定結果に基づき、前記制御対象の動作の制御処理に係る指令値を決定する後制御処理工程と、
を有し、
前記推論工程、及び前記後制御処理工程においては、前記学習済みモデルが実装された一連の制御プログラムに基づいて実行され、
前記制御プログラムの実行中に前記学習済みモデルが更新される更新工程をさらに有することを特徴とする、制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、学習済みモデルを実装した制御プログラムによって制御対象である生産装置等を制御するための制御方法、及び当該制御方法において用いられる制御装置に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
従来、制御対象の状態量を表わす複数の入力信号を取り込み、これらの入力信号にシーケンス制御の内容に応じた重みづけを行った後それらの総和を求め、さらに総和を入力信号としてシーケンス制御の内容に応じた重みづけを行った後それらの総和を求める演算処理を繰り返し、この演算処理の最終内容を制御信号とするシーケンス制御方法が公知である。当該シーケンス制御方法において繰り返される演算処理は、ニューラルネットを模擬した構成を有する。
【0003】
そして、階層状にネットワーク構成された複数段の演算単位(演算要素)は、それぞれ前段の複数の演算単位から出力信号を取り込み、それぞれに設定された重みづけを乗じて加算処理して出力する。すなわち、後段側の演算単位は前段の複数の演算単位の影響を重みに応じて総合的に受け、重みを適当に設定することにより、ネットワークに一定の推論能力が備わり、最終段の演算出力は初段の演算単位に入力される入力信号の内容に対し、所定のシーケンス制御対応した内容の出力信号に生成される。このことにより所謂学習モデルが構築される。したがって、演算処理に部分的な異常(故障や誤動作)が発生しても、小規模な異常であれば、一定の推論により正しい出力が決定されるので、誤った制御信号が出力されることが少なくなる(例えば、特許文献1参照)。
【0004】
しかしながら、特許文献1に示すようなシーケンス制御方法に基づく、生産装置等の動作を制御するための制御装置においては、学習モデルの構築及び更新は、制御装置とは別の装置で行われていた。そのため、例えば再学習等によって学習モデルの学習機能を更新する際、新たに構築した学習モデルを制御装置に転送する必要がある。そのため、学習モデルを更新する際には、生産装置等の制御対象を停止する必要性が生じ、生産効率の低下に繋がる虞がある。また、学習モデルを用いた制御対象の異常の検知も、制御装置と別の装置において行われていたため、学習モデルから得られる学習済み結果に基づいて後の制御処理を変更する場合、その変更後における生産装置等の作動に遅れが生じる虞がある。
【先行技術文献】
【特許文献】
【0005】
特開平03-081803号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本件開示の技術は、上記の問題を解決するためになされたものであり、その目的は、制御対象である生産装置等を停止することなく学習済みモデルの更新を行い、学習済みの結果に基づいて後の制御処理を変更する場合でもその変更後における生産装置等の作動の遅延を抑制することを可能とする制御装置、及び制御方法を提供することである。なお、制御対象の制御を実行するための学習モデルは、制御装置と異なる学習端末において既に学習済みのものであるため、以下においても、学習モデルを学習済みモデルという。
【課題を解決するための手段】
【0007】
上記の課題を解決するための本開示は、
制御対象の状態に応じて当該制御対象の動作を制御する制御装置であって、
前記制御対象の状態に関連するデータに基づいて、学習済みモデルを用いた所定の演算処理を実行し、前記制御対象の状態に係る判定結果を推論する推論部と、
前記推論部が推論した前記判定結果に基づき、前記制御対象の動作の制御処理に係る指令値を決定する後制御処理部と、
を有し、
前記推論部、及び前記後制御処理部は、前記学習済みモデルが実装された一連の制御プログラムに基づいて作動し、
前記制御プログラムの実行中に前記学習済みモデルを更新する更新部をさらに有することを特徴とする、制御装置を含む。
【0008】
本開示による制御装置が有する推論部について、所定の演算処理は、学習済みモデルに基づいて実行され、例えば新たに導入された制御対象の動作の制御処理にも対応できるように、新たな学習済みモデルに係るパラメータを端末から読み込み、使用中の学習済みモデルを適宜更新する必要がある。本開示による制御装置においては、学習済みモデルを更新する際、制御対象を停止しなくてもよいため、制御対象が停止することによる不利益を被ることを抑制することが可能である。また、推論部が推論した判定結果に基づき、後制御処理部による制御処理を変更する場合でもその変更後における制御対象の作動の遅延を抑制することが可能である。また、推論部、及び後制御処理部は、一連の制御プログラムに基づいて作動するが、学習済みモデルが実装された制御プログラムであればその種類は何でもよい。ここで、一連の制御プログラムの「一連」とは、同一の制御プログラムのフローの中で作動する場合と、互いに関連して独立にコードされたプログラムにおいて順次実行される場合を含む。
【0009】
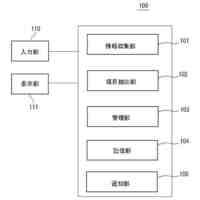
また、本開示においては、前記データを前記制御プログラムに入力する入力部と、前記入力部が入力した前記データに対して、前記学習済みモデルが読み取り可能となる処理を実行する前制御処理部と、前記後制御処理部が決定した前記指令値を、前記制御対象に対して出力する出力部と、をさらに有し、前記前制御処理部、前記推論部、及び前記後制御処理部は、前記制御プログラムに基づいて作動することとしてもよい。前制御処理部、推論部、及び後制御処理部は、制御プログラムに基づいて実行されることによって、学習済みモデルが読み取るデータが教師ありデータであっても教師なしデータであっても、所望の指令値を決定しやすい。
【0010】
また、本開示においては、前記制御プログラムは、ラダープログラムであってもよい。ラダープログラムには、所定の演算処理を繰り返し実行するコマンドを組み込むことが可能であり、ラダープログラムに実装された学習済みモデルに用いられるネットワーク形態が例えばニューラルネットワークである場合、ニューラルネットワークの各処理層に所定の演算処理を適用することが可能である。これによれば、ニューラルネットワークの各層に対応する演算パラメータの管理をより容易に行うことが可能である。例えばラダープログラムに組み込まれた全ての演算処理を実行しなくても、演算処理の途中で推論工程における判定結果を反映させたうえで制御対象の制御を行うことが可能である。すなわち、簡易的で高精度な演算処理を実行することが可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
電力変換装置
今日
オムロン株式会社
認証中継サーバ
今日
オムロン株式会社
制御装置、方法、プログラム、及び制御システム
3日前
オムロン株式会社
聴診装置およびこれを備えた聴診システム、聴診方法、聴診プログラム
7日前
オムロン株式会社
転落検知装置、転落検知システム、転落検知方法および転落検知プログラム
3日前
オムロン株式会社
旅客流動情報生成装置、旅客流動情報生成方法、および、旅客流動情報生成プログラム
2日前
オムロン株式会社
旅客流動情報生成装置、旅客流動情報生成方法、および、旅客流動情報生成プログラム
2日前
オムロン株式会社
データ収集方法、データ収集用移動装置、学習済みモデル、学習済みモデルの製造方法、自律型移動装置、学習用データの製造方法
今日
個人
GPSロガー
23日前
個人
情報処理システム
1か月前
個人
デトろぐシステム
22日前
個人
マウス用テーブル
9日前
個人
管理装置
15日前
日本精機株式会社
表示装置
1か月前
個人
指先受の付いたマウス。
1か月前
個人
都市経営シミュレーション
28日前
個人
管理装置
17日前
個人
特徴検討支援システム
15日前
個人
契約管理サーバ
14日前
アズビル株式会社
防爆装置
3日前
株式会社宗建
SNSサーバー
1日前
株式会社セガフェイブ
遊戯機
7日前
個人
選択操作音声出力システム
9日前
個人
支援システム及び支援方法
1か月前
國立臺灣大學
操作補助システム
29日前
株式会社テクロス
情報処理装置
21日前
株式会社ジール
文章の分析装置
8日前
株式会社奥村組
削孔位置検出方法
14日前
株式会社野村総合研究所
検証装置
21日前
個人
動作のデザイン評価の方法及び装置
今日
個人
すべて大吉となるおみくじ制作装置
1か月前
株式会社美好屋商店
広告システム
28日前
オムロン株式会社
認証中継サーバ
今日
アスエネ株式会社
森林管理の方法
3日前
大同特殊鋼株式会社
棒材計数装置
今日
トヨタ自動車株式会社
車両
15日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ