TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024092049
公報種別
公開特許公報(A)
公開日
2024-07-05
出願番号
2024075828,2022003817
出願日
2024-05-08,2021-06-18
発明の名称
表示制御方法
出願人
日鉄エンジニアリング株式会社
代理人
個人
,
個人
,
個人
主分類
A01K
61/80 20170101AFI20240628BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】より効率的な給餌に有効な給餌方法、給餌システム、及びプログラムを提供する。
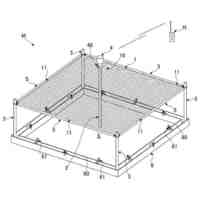
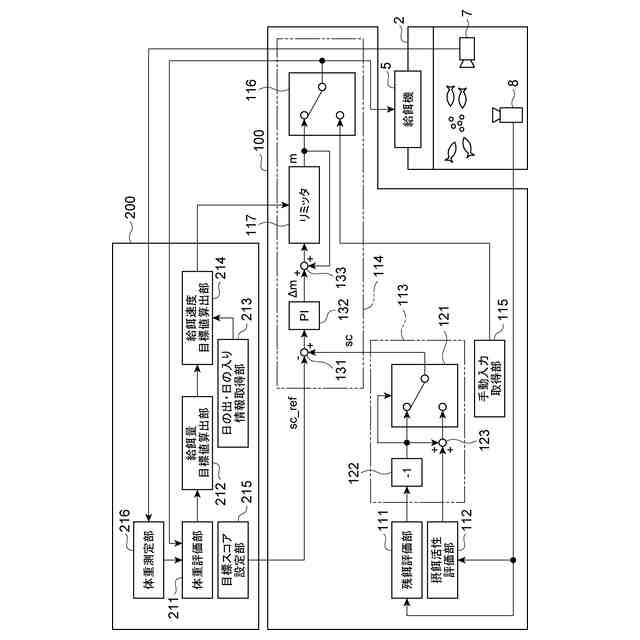
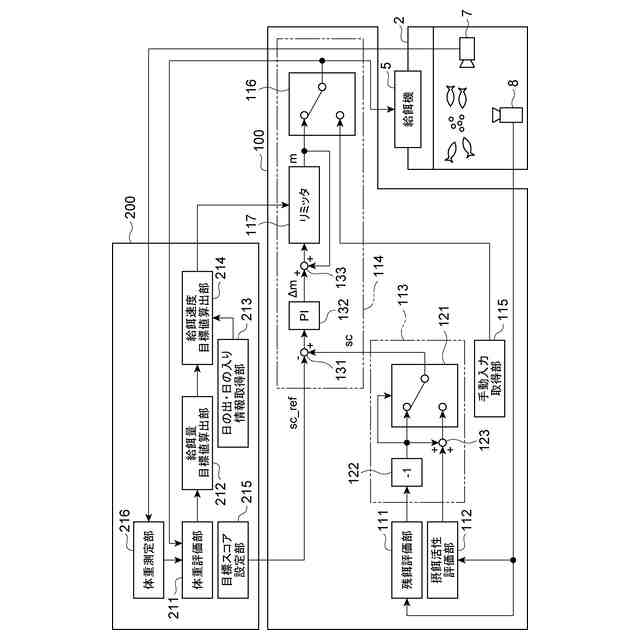
【解決手段】給餌方法は、生簀に設置されたセンサによる生簀内環境の検出結果に基づいて、残餌量を評価することと、生簀内環境の検出結果に基づいて、生簀内の水棲生物の摂餌活性を評価することと、残餌量の評価結果と、摂餌活性の評価結果とに基づいて給餌速度指令値を生成し、給餌速度指令値に対応する給餌速度で給餌するように給餌機を制御することと、を含む。
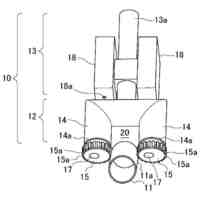
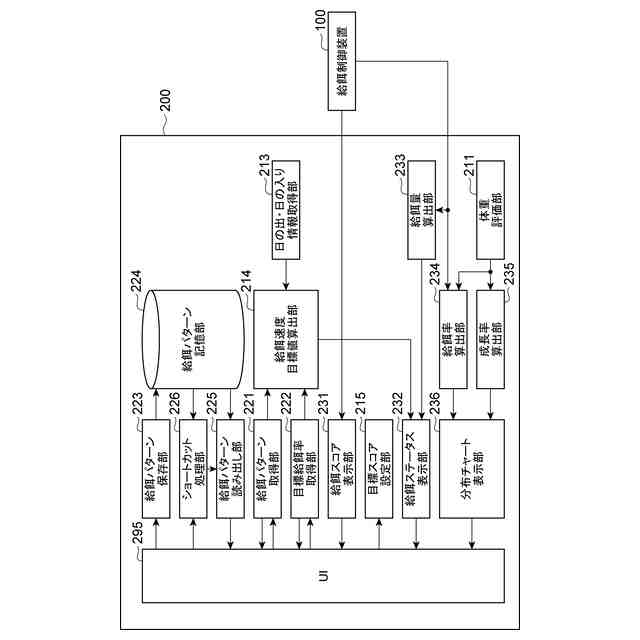
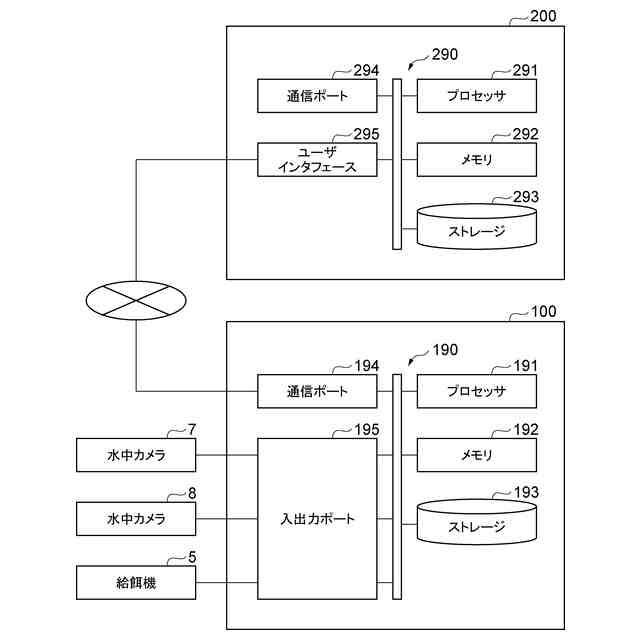
【選択図】図2
特許請求の範囲
【請求項1】
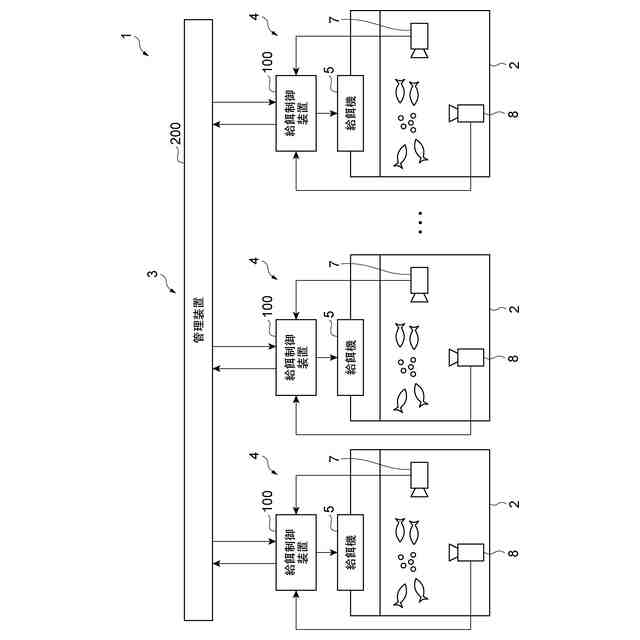
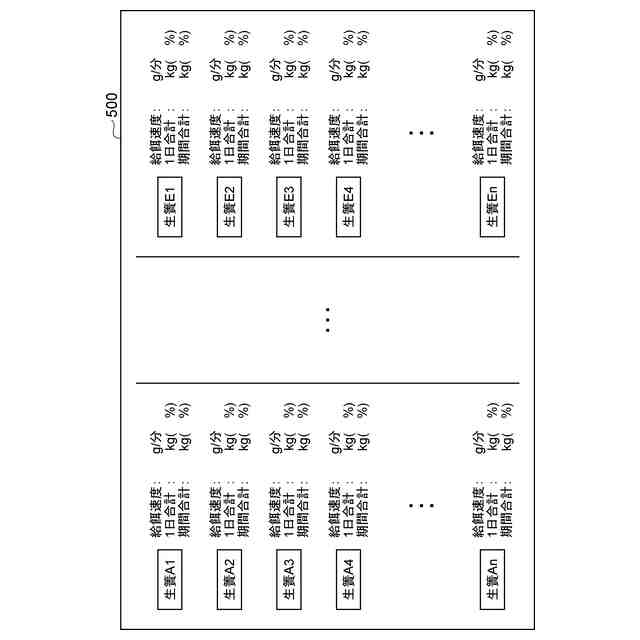
第1給餌機が取り付けられている第1生簀に対応する第1生簀画像と、前記第1給餌機の第1給餌速度に対応する第1給餌速度画像と、を対応付け、且つ、第2給餌機が取り付けられている第2生簀に対応する第2生簀画像と、前記第2給餌機の第2給餌速度に対応する第2給餌速度画像と、を対応付けて表示部に表示させる第1表示制御ステップ、を備え、
前記第1表示制御ステップにて、前記第1生簀画像と、前記第1給餌速度画像と、前記第2生簀画像と、前記第2給餌速度画像と、をともに前記表示部に表示させる、
ことを特徴とする表示制御方法。
続きを表示(約 2,400 文字)
【請求項2】
前記第1表示制御ステップにて、前記第1生簀画像と、前記第1給餌機の第1給餌量に対応する第1給餌量画像と、を対応付け、且つ、前記第2生簀画像と、前記第2給餌機の第2給餌量に対応する第2給餌量画像と、を対応付けて前記表示部に表示させ、
前記第1表示制御ステップにて、前記第1生簀画像と、前記第1給餌量画像と、前記第2生簀画像と、前記第2給餌量画像と、をともに前記表示部に表示させる、
ことを特徴とする請求項1に記載の表示制御方法。
【請求項3】
前記第1表示制御ステップにて、前記第1生簀画像と、前記第1給餌機の第1給餌量実績値に対応する第1給餌量実績値画像と、を対応付け、且つ、前記第2生簀画像と、前記第2給餌機の第2給餌量実績値に対応する第2給餌量実績値画像と、を対応付けて前記表示部に表示させ、
前記第1表示制御ステップにて、前記第1生簀画像と、前記第1給餌量実績値画像と、前記第2生簀画像と、前記第2給餌量実績値画像と、をともに前記表示部に表示させる、
ことを特徴とする請求項2に記載の表示制御方法。
【請求項4】
前記第1表示制御ステップにて、前記第1生簀画像と、前記第1給餌機の第1給餌量目標値に対応する第1給餌量目標値画像と、を対応付け、且つ、前記第2生簀画像と、前記第2給餌機の第2給餌量目標値に対応する第2給餌量目標値画像と、を対応付けて前記表示部に表示させ、
前記第1表示制御ステップにて、前記第1生簀画像と、前記第1給餌量目標値画像と、前記第2生簀画像と、前記第2給餌量目標値画像と、をともに前記表示部に表示させる、
ことを特徴とする請求項1または2に記載の表示制御方法。
【請求項5】
前記第1表示制御ステップにて、前記第1生簀画像と、前記第1給餌機の第1給餌量目標値に対する第1達成率に対応する第1達成率画像と、を対応付け、且つ、前記第2生簀画像と、前記第2給餌機の第2給餌量目標値に対する第2達成率に対応する第2達成率画像と、を対応付けて前記表示部に表示させ、
前記第1表示制御ステップにて、前記第1生簀画像と、前記第1達成率画像と、前記第2生簀画像と、前記第2達成率画像と、をともに前記表示部に表示させる、
ことを特徴とする請求項4に記載の表示制御方法。
【請求項6】
評価ステップと、
算出ステップと、
を更に備え、
前記評価ステップにて、前記第1生簀への給餌中に、前記第1生簀内の水棲生物に摂取されなかった餌の検出結果に基づいて、第1残餌量を評価し、前記第1生簀への給餌中に、前記水棲生物の検出結果に基づいて、前記水棲生物の第1摂餌活性を評価し、且つ、前記第2生簀への給餌中に、前記第2生簀内の水棲生物に摂取されなかった餌の検出結果に基づいて、第2残餌量を評価し、前記第2生簀への給餌中に、前記水棲生物の検出結果に基づいて、前記水棲生物の第2摂餌活性を評価し、
前記算出ステップにて、前記第1残餌量の評価結果と、前記第1摂餌活性の評価結果とに基づいて、第1摂餌スコアを算出し、且つ、前記第2残餌量の評価結果と、前記第2摂餌活性の評価結果とに基づいて、第2摂餌スコアを算出し、
前記第1表示制御ステップにて、前記第1生簀画像と、前記第1摂餌スコアに対応する第1摂餌スコア画像と、を対応付け、且つ、前記第2生簀画像と、前記第2摂餌スコアに対応する第2摂餌スコア画像と、を対応付けて前記表示部に表示させる、
ことを特徴とする請求項1または2に記載の表示制御方法。
【請求項7】
前記第1表示制御ステップにて、前記第1生簀画像と、面積が前記第1摂餌スコアに対応する第1面積画像と、を対応付け、且つ、前記第2生簀画像と、面積が前記第2摂餌スコアに対応する第2面積画像と、を対応付けて前記表示部に表示させ、
前記第1表示制御ステップにて、前記第1生簀画像と、前記第1面積画像と、前記第2生簀画像と、前記第2面積画像と、をともに前記表示部に表示させる、
ことを特徴とする請求項6に記載の表示制御方法。
【請求項8】
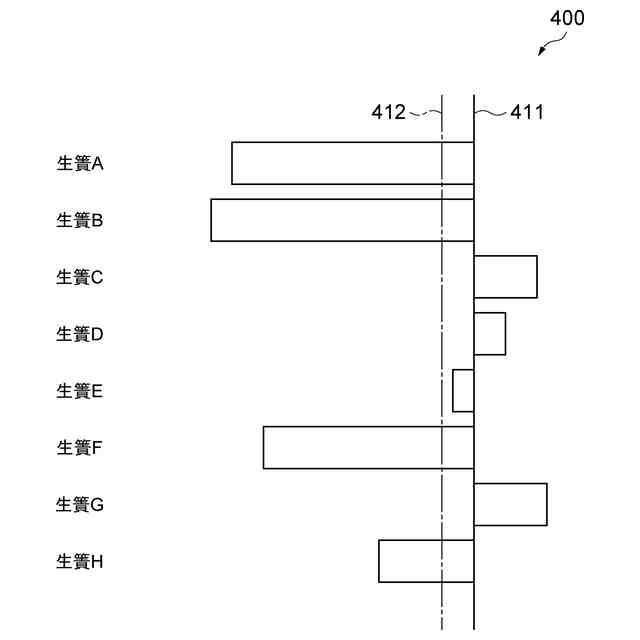
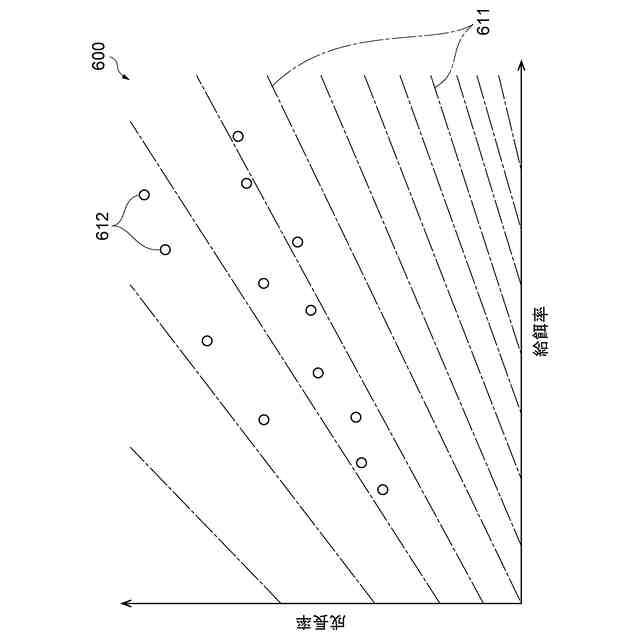
前記第1表示制御ステップにて、前記第1生簀と、前記第1給餌機の前記第1給餌量を前記第1生簀内の水棲生物の総体重に対する比率で表す第1給餌率と、前記第1生簀内の水棲生物の総体重の増加率を表す第1総体重増加率との関係を表す画像と、且つ、前記第2生簀と、前記第2給餌機の前記第2給餌量を前記第2生簀内の水棲生物の総体重に対する比率で表す第2給餌率と、前記第2生簀内の水棲生物の総体重の増加率を表す第2総体重増加率との関係を表す画像と、を前記表示部に表示させる、
ことを特徴とする請求項2に記載の表示制御方法。
【請求項9】
前記第1表示制御ステップにて、前記第1生簀と、前記第1給餌速度画像及び前記第1給餌機の第1給餌時間に対応する第1給餌時間画像を含む第1給餌パターン画像と、を対応付け、且つ、前記第2生簀と、前記第2給餌速度画像及び前記第2給餌機の第2給餌時間に対応する第2給餌時間画像を含む第2給餌パターン画像と、を対応付けて前記表示部に表示させる、
ことを特徴とする請求項1または2に記載の表示制御方法。
【請求項10】
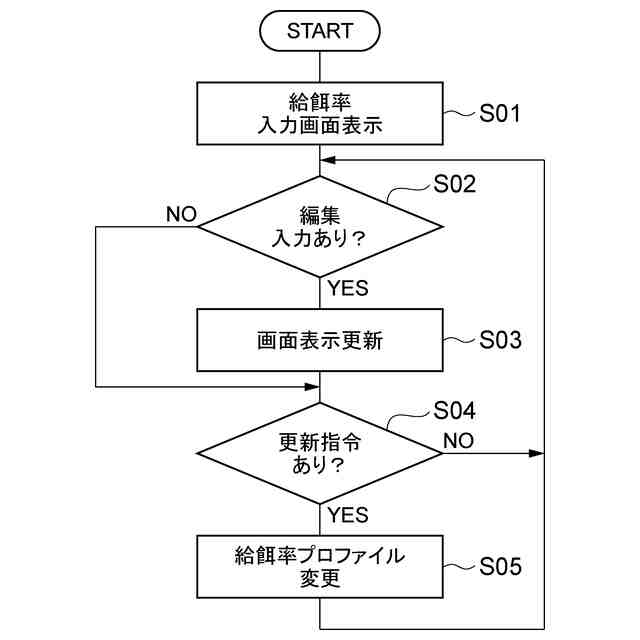
編集入力ステップ、
を更に備え、
前記第1表示制御ステップにて、前記第1給餌パターン画像及び前記第2給餌パターン画像の一方は、前記表示部に、前記編集入力ステップにて編集入力可能に表示される、
ことを特徴とする請求項9に記載の表示制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、表示制御方法に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
特許文献1には、自動給餌機と、残餌量を検出する残餌センサと、該残餌センサによって検出された残餌量に基づいて前記自動給餌機による給餌量を制御する制御手段とを含む自動給餌システムが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2000-4711号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、より効率的な給餌に有効な給餌方法、給餌システム、及びプログラムを提供する。
【課題を解決するための手段】
【0005】
本開示の一形態に係る給餌方法は、生簀に設置されたセンサによる生簀内環境の検出結果に基づいて、残餌量を評価することと、生簀内環境の検出結果に基づいて、生簀内の水棲生物の摂餌活性を評価することと、残餌量の評価結果と、摂餌活性の評価結果とに基づいて給餌速度指令値を生成し、給餌速度指令値に対応する給餌速度で給餌するように給餌機を制御することと、を含む。
【0006】
この給餌方法によれば、残餌量の評価結果に基づき給餌速度指令値を算出することにより、残餌を抑制するように給餌機を制御することができる。また、摂餌活性の評価結果に更に基づいて給餌速度指令値を算出することにより、残餌が出ていない状況における餌の不足を抑制するように給餌機を制御することができる。このため、給餌量の過不足を抑制することができる。従って、より効率的な給餌に有効である。
【0007】
残餌量が多くなるほど給餌速度指令値が小さくなり、摂餌活性が高くなるほど給餌速度指令値が大きくなるように、給餌速度指令値を算出してもよい。この場合、給餌量の過不足をより確実に抑制することができる。
【0008】
残餌量の評価結果と、摂餌活性の評価結果とに基づいて摂餌スコアを算出し、摂餌スコアを目標スコアに追従させるように給餌速度指令値を算出してもよい。この場合、残餌量の評価結果と、摂餌活性の評価結果とを一つの摂餌スコアにまとめることで、適切な給餌速度指令値を容易に算出することができる。
【0009】
残餌量が多くなるのに応じた摂餌スコアの変化方向と、摂餌活性が高くなるのに応じた摂餌スコアの変化方向とが逆向きになるように摂餌スコアを算出してもよい。この場合、給餌量の過不足状況をより的確に表す摂餌スコアを算出することができる。
【0010】
残餌量の評価結果が所定レベルを超えるのに応じて、摂餌スコアに対する摂餌活性の影響度を低くしてもよい。この場合、残餌量が所定レベルを超えるのに応じて、摂餌スコアに対する残餌量の影響度を高くすることで、過剰な給餌をより確実に抑制することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
産卵床
23日前
個人
泳がせの仕掛け
6日前
井関農機株式会社
作業機
5日前
個人
除草方法および装置
4日前
個人
引張犬散歩補助ベルト
9日前
個人
果樹の仕立て法
10日前
井関農機株式会社
コンバイン
1か月前
個人
刈払機
1か月前
井関農機株式会社
移植機
1か月前
井関農機株式会社
歩行型管理機
1か月前
井関農機株式会社
作業車両
1か月前
キヤノン電子株式会社
植物支持具
16日前
日油株式会社
除菌剤
1か月前
松山株式会社
農作業機
18日前
アピ株式会社
養蜂巣箱
19日前
株式会社北研
栽培物切断装置
3日前
株式会社 ごはん
水田除草機
3日前
井関農機株式会社
コンバイン
1か月前
個人
害獣捕獲装置
11日前
個人
残留物除去装置
12日前
個人
容器入り過酢酸生成組成物
2日前
株式会社アクト
消毒装置
2日前
株式会社大阪製薬
薬剤揮散具
1か月前
株式会社ササキコーポレーション
農作業機
5日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
2日前
株式会社マルカン
小動物用排泄容器
4日前
株式会社ルミカ
集魚灯
3日前
株式会社クボタ
作業機
1か月前
株式会社マルカン
小動物用排泄容器
4日前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社新原産業
畜舎の冷房システム
12日前
グローブライド株式会社
ルアー
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ