TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024093871
公報種別
公開特許公報(A)
公開日
2024-07-09
出願番号
2022210498
出願日
2022-12-27
発明の名称
作業機
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01C
11/02 20060101AFI20240702BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業装置が横送り機構における左右いずれかの端部に到達したことを検出する端部検出部を備えた作業機を提供する。
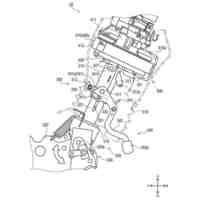
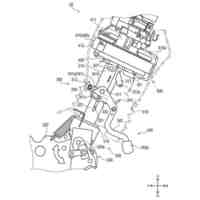
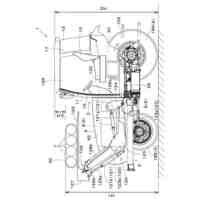
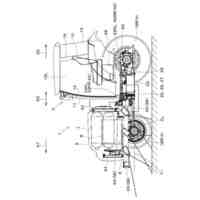
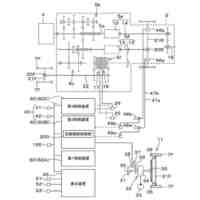
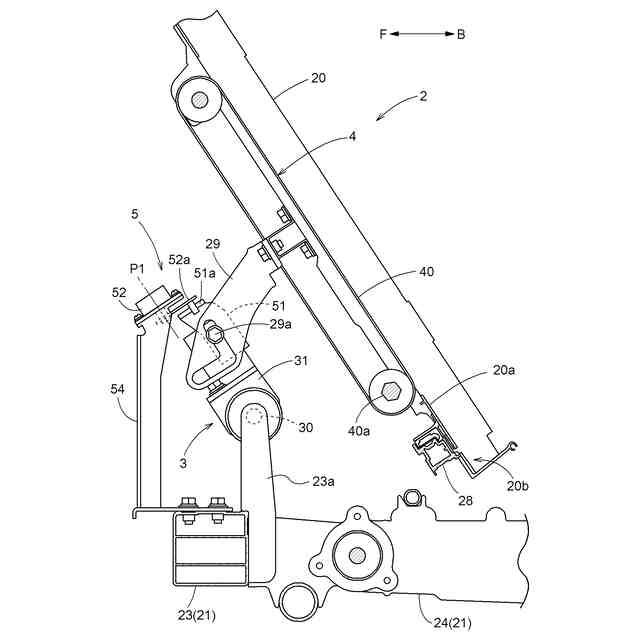
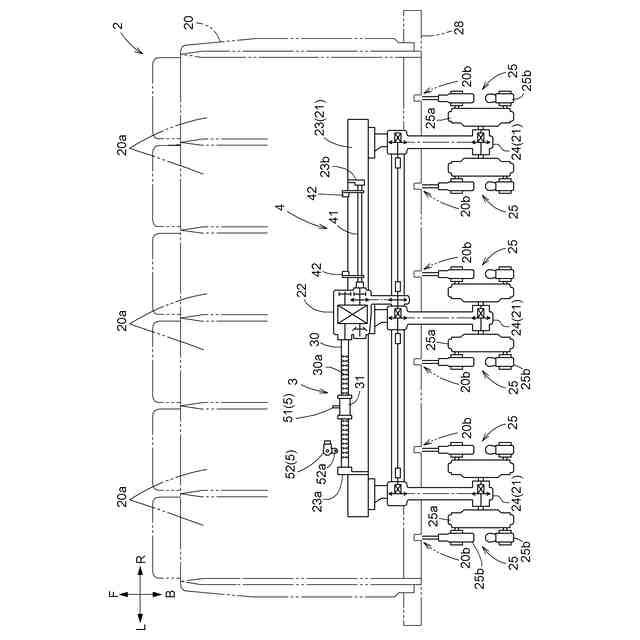
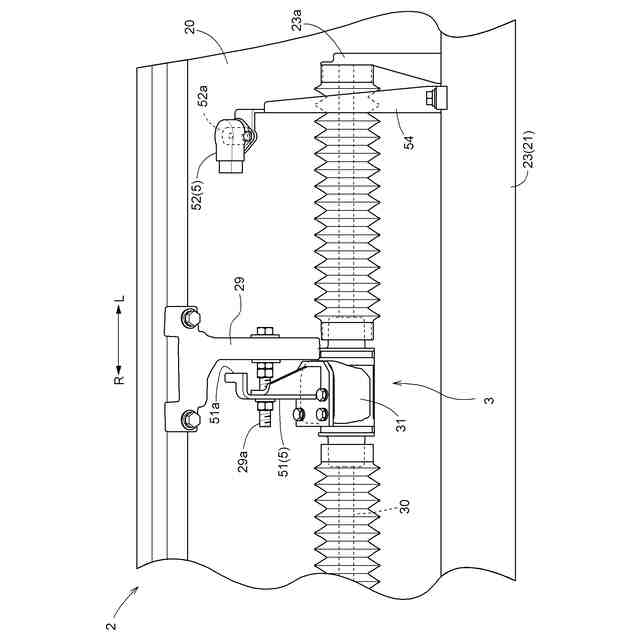
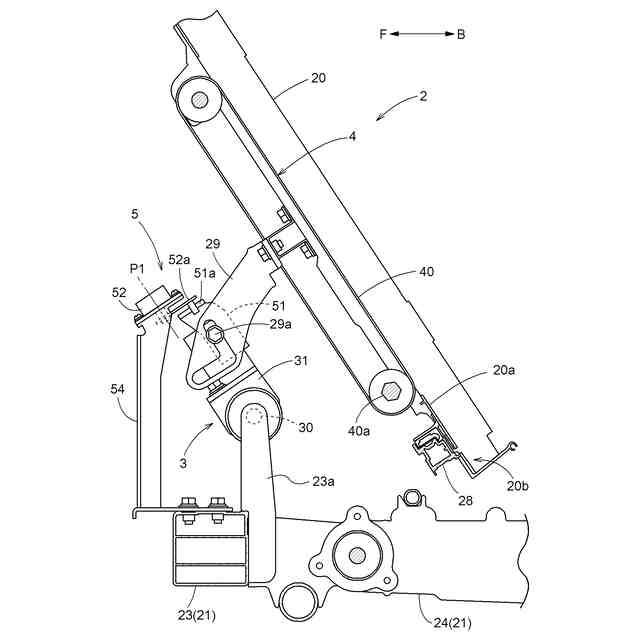
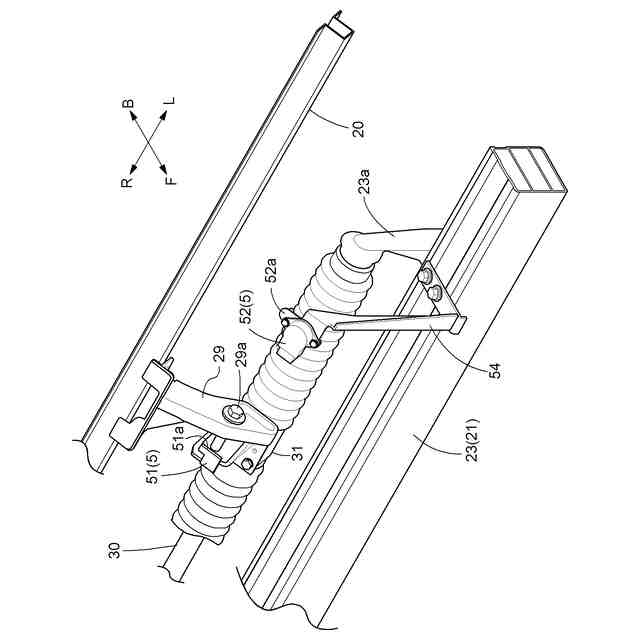
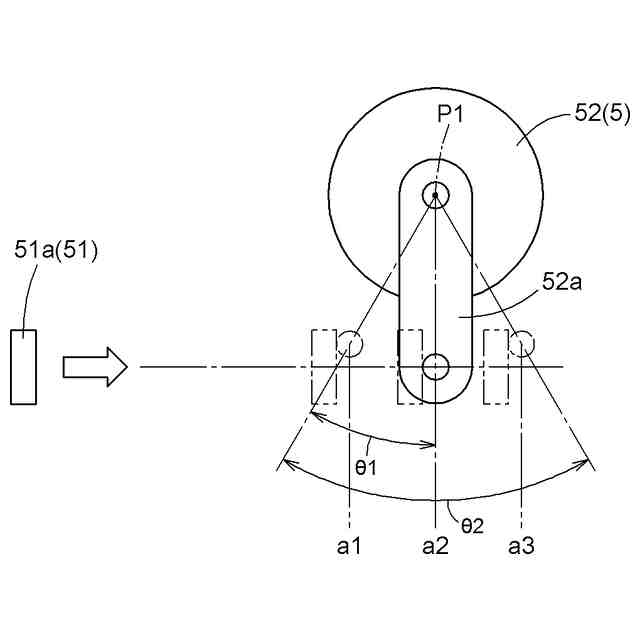
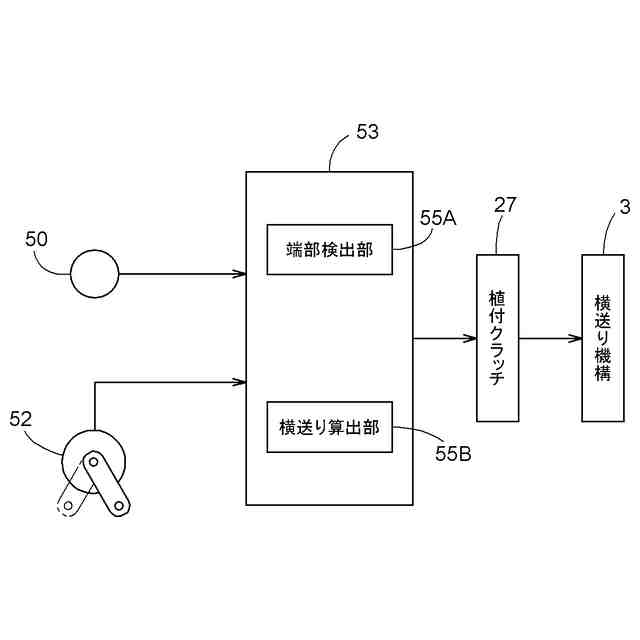
【解決手段】作業装置20の横送り機構3に、横送り軸30と移動体31とが備えられ、移動体31が作業装置20に連結され、移動体31及び作業装置20と一体に横移動する被検出部51が設けられ、被検出部51の横移動方向における位置を検出するセンサ52が、作業装置20に対して停止している支持部材21に設けられ、センサ52が、作業装置20の横移動に伴って被検出部51と接触する接触子52aを備え、被検出部51と接触子52aの接触に伴って発生する検出情報に基づいて、作業装置20が横送り機構3における左右いずれかの端部に到達したことを検出する端部検出部を備えた。
【選択図】図4
特許請求の範囲
【請求項1】
機体と、
機体後方に連結された作業部と、を備え、
前記作業部は横送り機構により左右方向に往復移動自在な作業装置を備え、
前記横送り機構に、左右に延出した横送り軸と前記横送り軸上を往復移動する移動体とが備えられ、
前記移動体が前記作業装置に連結されるとともに、前記移動体及び前記作業装置と一体に横移動する被検出部が設けられ、
前記被検出部の横移動方向における位置を検出するセンサが、前記作業部のうち前記作業装置に対して停止している支持部材に設けられ、
前記センサが、前記作業装置の横移動に伴って前記被検出部と接触する接触子を備え、
前記被検出部と前記接触子の接触に伴って発生する検出情報に基づいて、前記作業装置が前記横送り機構における左右いずれかの端部に到達したことを検出する端部検出部を備えた作業機。
続きを表示(約 1,100 文字)
【請求項2】
前記横送り軸は駆動回転され、
前記支持部材は前記作業装置を支持し、
前記センサは前記作業装置の横移動範囲における端部に配置されている請求項1記載の作業機。
【請求項3】
前記端部検出部による検知から前記接触子の移動量に基づき、前記横送り機構の横送り速度を算出する横送り算出部を備えた請求項1記載の作業機。
【請求項4】
前記作業装置は苗載せ台であり、前記支持部材は前記苗載せ台を支持する苗載せ台支持部材である請求項1記載の作業機。
【請求項5】
苗載せ台を左右方向に往復横移動させる横送り機構と、
前記苗載せ台に搭載された苗を取り出して圃場に植え付ける苗植付機構と、
前記横送り機構の作動を制御する苗載せ台制御部と、が備えられ、
前記横送り機構に、駆動回転される横送り軸と、前記横送り軸の回転に伴って前記横送り軸上を往復駆動される移動体と、が備えられ、
前記移動体が前記苗載せ台に連結されるとともに、前記移動体及び前記苗載せ台と一体に横移動する被検出部が設けられ、
前記被検出部の横移動方向における位置を検出するセンサが、前記苗載せ台を支持する苗載せ台支持部材に設けられ、
前記センサが、前記苗載せ台の横移動に伴って前記被検出部と接触する接触子を備え、
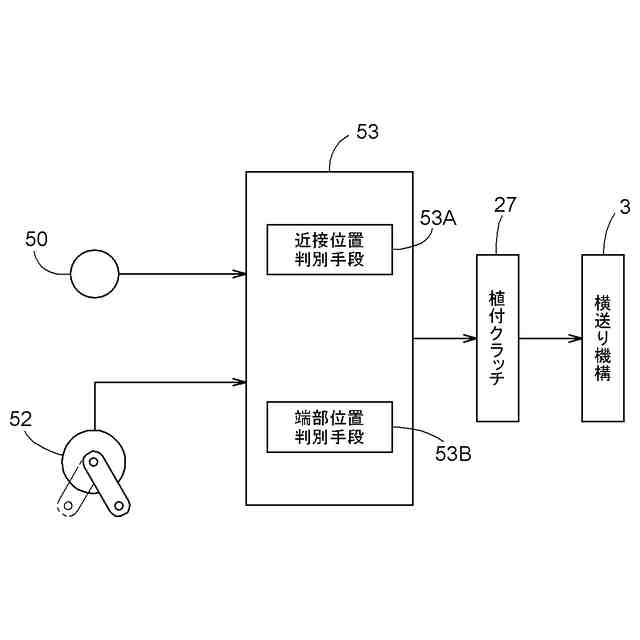
前記接触子が、前記苗載せ台の横移動範囲における端部近くで、かつ前記端部よりも当該横移動範囲の中央側へ寄った箇所である端部近接位置から前記横移動範囲の端部である端部位置にわたる検出領域で接触移動可能に構成され、
前記検出領域における前記接触子での検出情報に基づいて、前記苗載せ台制御部から前記横送り機構に対して前記苗載せ台の停止指令が出力されるようにしてある作業機。
【請求項6】
前記センサはポテンショメータであり、前記検出領域における前記接触子の回転量の検出結果に基づいて前記停止指令を出力するようにしてある請求項5記載の作業機。
【請求項7】
前記センサはポテンショメータであり、前記検出領域における前記接触子の角速度の検出結果に基づいて前記停止指令を出力するようにしてある請求項5記載の作業機。
【請求項8】
前記センサは、前記横移動範囲の一方の端部を検出する箇所に設けられている請求項5記載の作業機。
【請求項9】
前記センサは、前記横移動範囲の両方の端部を検出する箇所に設けられている請求項5記載の作業機。
【請求項10】
前記センサは、前記苗載せ台支持部材におけるツールバーに対して、上向きに取り付けらえた取付ステーを介して取り付けられている請求項5~9のいずれか一項記載の作業機。
発明の詳細な説明
【技術分野】
【0001】
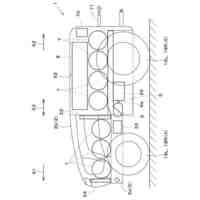
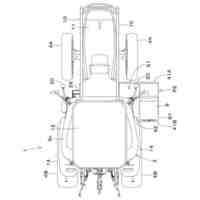
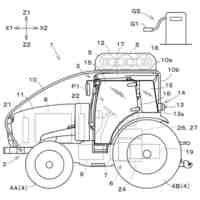
本発明は、機体後方に作業部を連結した作業機に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
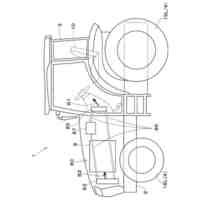
特許文献1には、作業機の一例としてエンジンを搭載した走行機体と、当該エンジンから伝達される動力により駆動する苗植付装置と、を備える田植機が記載されている。苗植付装置は、マット状苗が載置される苗載せ台を備え、苗載せ台は左右方向に往復横移動可能に構成されている。
この種の作業機では、苗載せ台にマット状苗を載置する際に、苗載せ台を予め左右いずれか一方の端部に移動させる端寄せ作業を行う場合がある。この特許文献1に示される田植機では、苗載せ台が左右いずれかの端部に到達したことを検出する端寄せスイッチを備えており、その端寄せスイッチが作動したときに端寄せ作業を自動的に終了するように構成されている。
【先行技術文献】
【特許文献】
【0003】
特開2012-196155号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
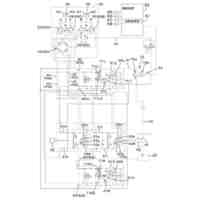
特許文献1の作業機では、無段変速機構で変速されたエンジン動力が、PTO軸を介して苗植付装置における伝動ケースに入力することにより、各植付け装置の駆動、および苗載せ台の左右方向への横送り機構等の駆動を行うように構成されている。そして、端寄せ作業時における苗載せ台の停止位置は、特定位置に固定された端部スイッチによって、苗載せ台の横移動範囲の端部に相当する一箇所で検出される。
このため、例えばエンジン速度が必要以上に高くなったり、逆に遅くなりすぎたりして、苗載せ台の横送り速度が想定よりも大きく変化した場合などに、苗載せ台の移動慣性が大きく変化する虞がある。この場合に、端部位置の検出後における実際の停止位置が、予定された停止位置からずれてしまうことが考えられる。そうすると以後の植え付け作業時における苗取り量に過不足が生じるおそれがある。
【0005】
本発明は、作業装置が横送り機構における左右いずれかの端部に到達したことを検出する端部検出部を備えた作業機を提供しようするものである。
【課題を解決するための手段】
【0006】
本発明の作業機は、
機体と、
機体後方に連結された作業部と、を備え、
前記作業部は横送り機構により左右方向に往復移動自在な作業装置を備え、
前記横送り機構に、左右に延出した横送り軸と前記横送り軸上を往復移動する移動体とが備えられ、
前記移動体が前記作業装置に連結されるとともに、前記移動体及び前記作業装置と一体に横移動する被検出部が設けられ、
前記被検出部の横移動方向における位置を検出するセンサが、前記作業部のうち前記作業装置に対して停止している支持部材に設けられ、
前記センサが、前記作業装置の横移動に伴って前記被検出部と接触する接触子を備え、
前記被検出部と前記接触子の接触に伴って発生する検出情報に基づいて、前記作業装置が前記横送り機構における左右いずれかの端部に到達したことを検出する端部検出部を備えたことを特徴とする。
【0007】
本発明によれば、センサが、被検出部と接触子の接触に伴って発生する検出情報に基づいて、作業装置が横送り機構における左右いずれかの端部に到達したことを検出し得る。
【0008】
本発明の好適な実施形態の1つでは、
前記横送り軸は駆動回転され、
前記支持部材は前記作業装置を支持し、
前記センサは前記作業装置の横移動範囲における端部に配置されている。
【0009】
この手段によると、作業装置の横移動範囲における端部を検出し得る。
【0010】
本発明の好適な実施形態の1つでは、
前記端部検出部による検知から前記接触子の移動量に基づき、前記横送り機構の横送り速度を算出する横送り算出部を備えた。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
18日前
株式会社クボタ
作業機
18日前
株式会社クボタ
作業車
18日前
株式会社クボタ
作業車
18日前
株式会社クボタ
作業車両
25日前
株式会社クボタ
作業車両
25日前
株式会社クボタ
作業車両
25日前
株式会社クボタ
作業車両
25日前
株式会社クボタ
作業車両
25日前
株式会社クボタ
作業車両
25日前
株式会社クボタ
作業車両
25日前
株式会社クボタ
作業車両
25日前
株式会社クボタ
作業車両
25日前
株式会社クボタ
作業車両
25日前
株式会社クボタ
作業車両
25日前
株式会社クボタ
作業車両
25日前
株式会社クボタ
電動作業車
18日前
株式会社クボタ
電動作業車
18日前
株式会社クボタ
電動作業車
18日前
株式会社クボタ
ガスエンジン
25日前
株式会社クボタケミックス
圃場管理システム
25日前
株式会社クボタケミックス
圃場管理システム
25日前
株式会社クボタ
回転式ポンプゲート及び回転式ポンプゲートの制御方法
25日前
株式会社クボタ
作業機
23日前
株式会社クボタ
作業機
23日前
株式会社クボタ
作業機
5日前
株式会社クボタ
作業機
3日前
株式会社クボタ
作業車両
23日前
株式会社クボタ
キャビン
18日前
株式会社クボタ
トラクタ
3日前
株式会社クボタ
トラクタ
3日前
株式会社クボタ
コンバイン
3日前
株式会社クボタ
電動作業車
16日前
株式会社クボタ
電動作業車
9日前
株式会社クボタ
圃場作業車両
18日前
株式会社クボタケミックス
排水配管継手
3日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ