TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024087823
公報種別
公開特許公報(A)
公開日
2024-07-02
出願番号
2022202694
出願日
2022-12-20
発明の名称
車両動揺補正装置及び車両動揺補正方法
出願人
株式会社明電舎
代理人
園田・小林弁理士法人
主分類
G01B
11/00 20060101AFI20240625BHJP(測定;試験)
要約
【課題】 高精度に架線設備の検測を行うこと。
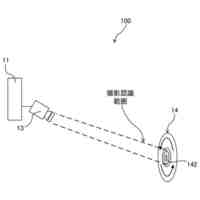
【解決手段】 車両動揺補正装置は、架線設備が設けられた軌道を走行する車両の車体に取り付けられ、物体までの距離のデータを取得するレーザと、前記レーザに接続される情報処理装置とを有し、前記情報処理装置は、前記架線設備の位置を計測する計測部と、前記レーザによって取得されるデータを用いて軌道位置を検出する検出部と、前記検出部によって検出される軌道位置に基づいて、前記車体の傾きを算出する算出部と、前記算出部によって算出される傾きから、前記車体を基準とする座標系の座標を前記軌道を基準とする座標系の座標に変換する変換式を導出し、前記計測部によって計測される架線設備の位置の座標を変換式によって補正する補正部とを有する。
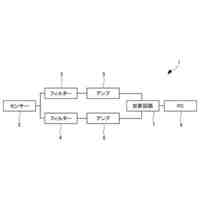
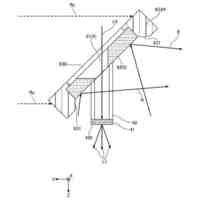
【選択図】 図2
特許請求の範囲
【請求項1】
架線設備が設けられた軌道を走行する車両の車体に取り付けられ、物体までの距離のデータを取得するレーザと、
前記レーザに接続される情報処理装置とを有し、
前記情報処理装置は、
前記架線設備の位置を計測する計測部と、
前記レーザによって取得されるデータを用いて軌道位置を検出する検出部と、
前記検出部によって検出される軌道位置に基づいて、前記車体の傾きを算出する算出部と、
前記算出部によって算出される傾きから、前記車体を基準とする座標系の座標を前記軌道を基準とする座標系の座標に変換する変換式を導出し、前記計測部によって計測される架線設備の位置の座標を変換式によって補正する補正部と
を有する車両動揺補正装置。
続きを表示(約 390 文字)
【請求項2】
前記車体の前記レーザとは異なる位置に取り付けられる他のレーザをさらに有し、
前記検出部は、
前記レーザ及び前記他のレーザによって取得されるデータを用いて軌道位置を検出する
請求項1に記載の車両動揺補正装置。
【請求項3】
架線設備が設けられた軌道を走行する車両の車体に取り付けられるレーザを用いて、物体までの距離のデータを取得し、
前記架線設備の位置を計測し、
前記レーザによって取得されるデータを用いて軌道位置を検出し、
検出される軌道位置に基づいて、前記車体の傾きを算出し、
算出される傾きから、前記車体を基準とする座標系の座標を前記軌道を基準とする座標系の座標に変換する変換式を導出し、
前記架線設備の位置の座標を前記変換式によって補正する
工程を有する車両動揺補正方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両動揺補正装置及び車両動揺補正方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
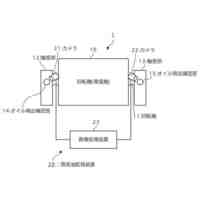
通常、架空電車線方式を採用する車両の軌道上には、トロリ線などの架線設備が架設されている。車両は、パンタグラフによって架線設備から受電し軌道上を走行するため、電力を供給する架線設備には適切な位置に敷設されることが要求される。このため、架線設備の位置の検測が行われるのが一般的である。
【0003】
架線設備の検測は、例えば車両屋根上に設置されたカメラによって車両上方を撮影し、得られた画像の画像処理によって例えばトロリ線の高さ及び偏位を計測することにより行われることがある。
【先行技術文献】
【特許文献】
【0004】
特開2018-146509号公報
特開2006-248412号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、検測を行う車両は走行中に動揺するため、検測の誤差が大きくなる恐れがあるという問題がある。すなわち、車両は、架線設備の検測のための走行中、振動や空気ばねの影響により常に上下左右に動揺している。したがって、例えば車両屋根上に設置されたカメラも動揺し、このカメラによって撮影された画像から計測される架線設備の高さ及び偏位には誤差が含まれることになる。
【0006】
このような誤差は、カメラの撮影画像から検測する場合のみならず車両に取り付けられる種々のセンサを用いて検測が行われる場合には、同様に発生し、検測結果の精度が低下してしまう。
【0007】
本開示は、上記に鑑みてなされたものであり、高精度に架線設備の検測を行うことができる車両動揺補正装置及び車両動揺補正方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
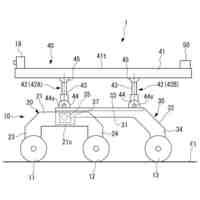
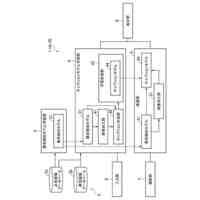
本開示の一態様によれば、車両動揺補正装置は、架線設備が設けられた軌道を走行する車両の車体に取り付けられ、物体までの距離のデータを取得するレーザと、前記レーザに接続される情報処理装置とを有し、前記情報処理装置は、前記架線設備の位置を計測する計測部と、前記レーザによって取得されるデータを用いて軌道位置を検出する検出部と、前記検出部によって検出される軌道位置に基づいて、前記車体の傾きを算出する算出部と、前記算出部によって算出される傾きから、前記車体を基準とする座標系の座標を前記軌道を基準とする座標系の座標に変換する変換式を導出し、前記計測部によって計測される架線設備の位置の座標を変換式によって補正する補正部とを有する。
【0009】
また、本開示の一態様によれば、車両動揺補正方法は、架線設備が設けられた軌道を走行する車両の車体に取り付けられるレーザを用いて、物体までの距離のデータを取得し、前記架線設備の位置を計測し、前記レーザによって取得されるデータを用いて軌道位置を検出し、検出される軌道位置に基づいて、前記車体の傾きを算出し、算出される傾きから、前記車体を基準とする座標系の座標を前記軌道を基準とする座標系の座標に変換する変換式を導出し、前記架線設備の位置の座標を前記変換式によって補正する工程を有する。
【図面の簡単な説明】
【0010】
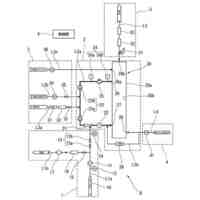
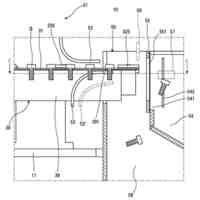
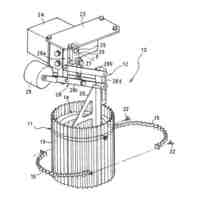
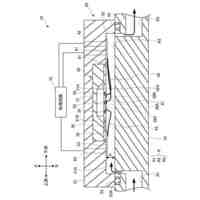
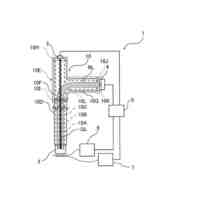
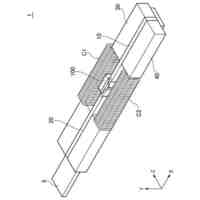
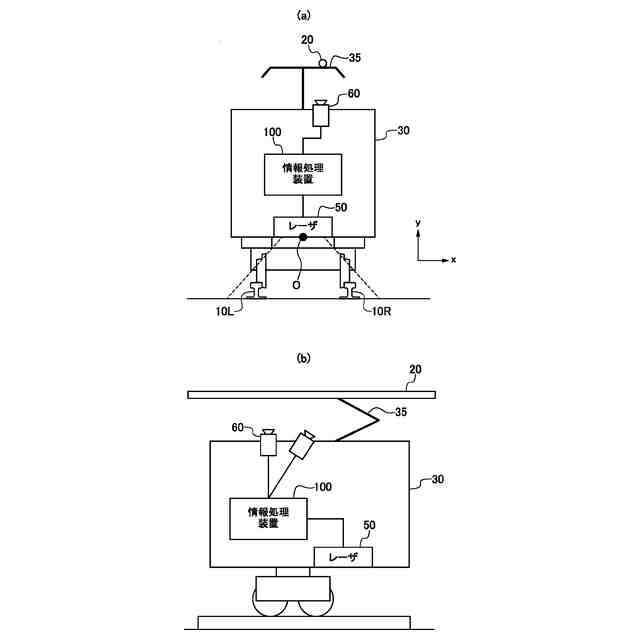
図1は、実施の形態1に係る車両動揺補正装置の構成を示す模式図である。
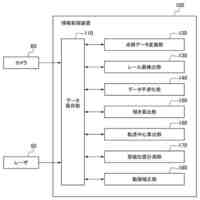
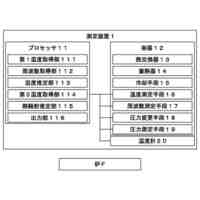
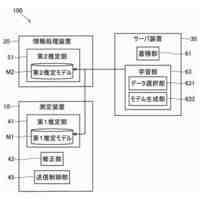
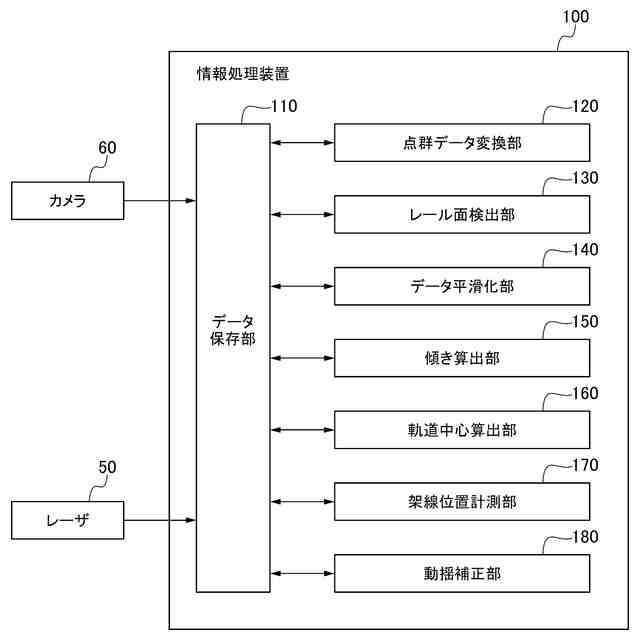
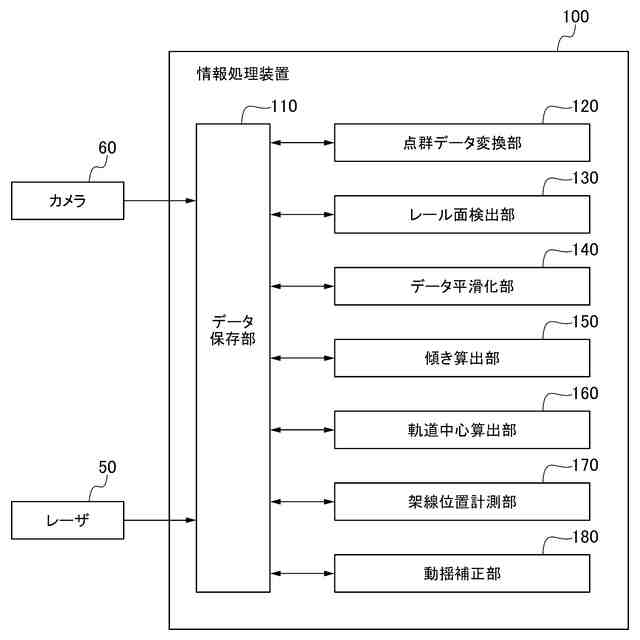
図2は、実施の形態1に係る情報処理装置の構成を示すブロック図である。
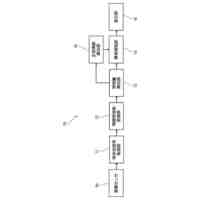
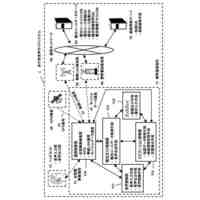
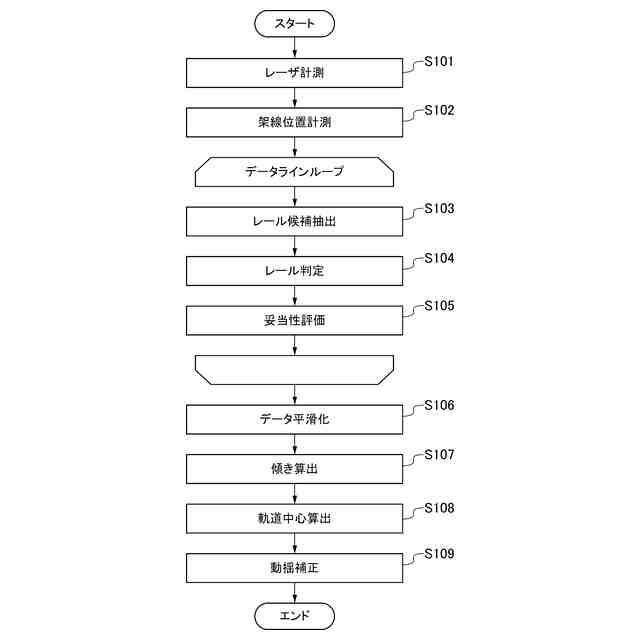
図3は、実施の形態1に係る車両動揺補正方法を示すフロー図である。
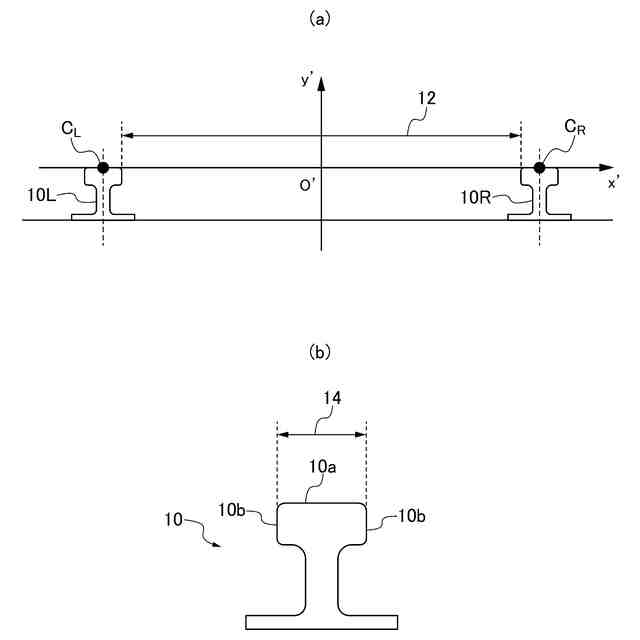
図4は、レールの構造を説明する図である。
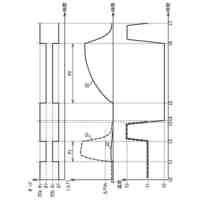
図5は、点群データの具体例を示す図である。
図6は、探索範囲の具体例を示す図である。
図7は、レール候補の具体例を示す図である。
図8は、上面データ及び側面データの具体例を示す図である。
図9は、レール中心点の具体例を示す図である。
図10は、レール判定を説明する図である。
図11は、車両の傾きの具体例を示す図である。
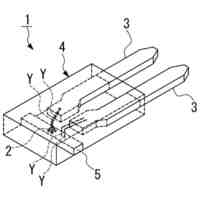
図12は、実施の形態2に係る車両動揺補正装置の構成を示す模式図である。
図13は、点群データの具体例を示す図である。
図14は、実施の形態2に係る情報処理装置の構成を示すブロック図である。
図15は、実施の形態2に係る車両動揺補正方法を示すフロー図である。
図16は、実施の形態3に係る車両動揺補正装置の構成を示す模式図である。
図17は、実施の形態3に係る情報処理装置の構成を示すブロック図である。
図18は、実施の形態3に係る車両動揺補正方法を示すフロー図である。
図19は、情報処理装置のハードウェア構成の具体例を示すブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社明電舎
潤滑油監視装置
今日
株式会社明電舎
ロッカーボギー車
2日前
株式会社明電舎
セル多重インバータ
1日前
株式会社明電舎
異常検知装置及び異常検知方法
7日前
株式会社明電舎
設備診断システム、設備診断方法
3日前
株式会社明電舎
オゾン水の生成装置および生成方法
今日
株式会社明電舎
車両動揺補正装置及び車両動揺補正方法
2日前
株式会社明電舎
制御パラメータに関する深層強化学習の評価方法
今日
日東精工株式会社
検査装置
今日
オンキヨー株式会社
システム
16日前
横河電機株式会社
光学プローブ
16日前
株式会社ヨコオ
検査治具
28日前
個人
歩行者音声ガイドシステム
27日前
昭電工業株式会社
測定装置
29日前
太陽誘電株式会社
検出装置
23日前
大和製衡株式会社
組合せ秤
今日
個人
回転動作検出システム
2日前
アズビル株式会社
流量センサ
1日前
大和製衡株式会社
重量選別機
21日前
株式会社東芝
センサ
8日前
株式会社ニシヤマ
物品取付装置
24日前
株式会社ヨコオ
接続装置
1日前
矢崎総業株式会社
センサ
23日前
株式会社ニシヤマ
物品取付装置
24日前
個人
氷河融雪水流出量の推定方法
15日前
株式会社テイエルブイ
流量推定システム
2日前
日本電気株式会社
LiDAR装置
今日
大同特殊鋼株式会社
形状検出装置
23日前
TDK株式会社
磁気センサ
28日前
株式会社島津製作所
分析装置
23日前
ミツミ電機株式会社
測距装置
1日前
株式会社ジークエスト
感温センサー
今日
三菱マテリアル株式会社
温度センサ
24日前
ローム株式会社
磁気検出装置
今日
三菱マテリアル株式会社
温度センサ
3日前
三菱マテリアル株式会社
温度センサ
16日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ