TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024086704
公報種別
公開特許公報(A)
公開日
2024-06-27
出願番号
2023212689
出願日
2023-12-18
発明の名称
魚群探知システム及び魚群探知方法
出願人
古野電気株式会社
代理人
主分類
G01S
15/96 20060101AFI20240620BHJP(測定;試験)
要約
【課題】 本発明は、魚群探知システム及び魚群を探知・追跡し表示部に表示する方法に関する。
【解決手段】 船舶用魚群探知システムは、超音波信号を水中に送信し、反射エコー信号を受信するように構成された送受波器と接続するインターフェースと、船舶に取り付けられた舵を制御するように構成された自動操舵装置とを備える。さらに、魚群探知システムは、インターフェースに通信可能に結合され、仕掛けの位置を検出し、船舶から仕掛けまでのベクトルを算出し、算出されたベクトルに基づいて舵を制御する自動操舵装置の為の舵制御信号を生成するように構成された信号処理部を備える。
【選択図】図1
特許請求の範囲
【請求項1】
船舶に搭載され、魚群を探知・追跡し表示部に表示する魚群探知システムにおいて、
超音波信号を水中に送信し、反射されたエコー信号を受信する送受波器と、
前記船舶に取り付けられる舵を制御する自動操舵装置と、を接続するインターフェースと、
インターフェイスに通信可能に結合される信号処理部を有し、
前記信号処理部は、
仕掛けを検出し、
前記船舶から前記仕掛けまでのベクトルを算出し、
算出された前記ベクトルに基づいて前記舵自動操舵装置の舵制御信号を生成する、
ことを特徴とする魚群探知システム。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載の魚群探知システムにおいて、
前記送受波器は、扇形の超音波信号を水中に送信し、反射されたエコー信号を受信する、
ことを特徴とする魚群探知システム。
【請求項3】
請求項2に記載の魚群探知システムにおいて、
前記信号処理部は、さらに
前記仕掛けを追跡し、
前記仕掛けの挙動を推定し、
前記仕掛けの推定された前記挙動に基づいて前記舵自動操舵装置の舵制御信号を生成する、
ことを特徴とする魚群探知システム。
【請求項4】
請求項1に記載の魚群探知システムにおいて、
前記送受波器は、さらに、
超音波信号を水域の3方向に送信し、反射されたエコー信号を受信する、
ことを特徴とする魚群探知システム。
【請求項5】
請求項4に記載の魚群探知システムにおいて、
信号処理部は、さらに
前記仕掛けを追跡し、
前記仕掛けの挙動を推定し、
前記仕掛けの推定された前記挙動に基づいて前記舵自動操舵装置の舵制御信号を生成する、
ことを特徴とする魚群探知システム。
【請求項6】
請求項4に記載の魚群探知システムにおいて、
3つの方向は、左舷、下方、右舷に対応する、
ことを特徴とする魚群探知システム。
【請求項7】
請求項3に記載の魚群探知システムにおいて、
前記信号処理部は、
前記自動操舵装置に前記舵制御信号を出力し、
前記仕掛けの推定された前記挙動に基づいて船の舵を制御する、
ことを特徴とする魚群探知システム。
【請求項8】
請求項1に記載の魚群探知システムにおいて、
信号処理部は、さらに前記仕掛けに実装された反射板からの反射エコー信号に基づいて前記仕掛けを検出する、
ことを特徴とする魚群探知システム。
【請求項9】
請求項1に記載の魚群探知システムにおいて、
前記信号処理部は、前記船舶の位置を測位する為の自船位置測位部、を備える、
ことを特徴とする魚群探知システム。
【請求項10】
請求項1に記載の魚群探知システムにおいて、
前記信号処理部は、さらに
入力データとしての前記仕掛けの位置及び前記船舶の位置を有するニューラルネットワークと、
入力データを教師データとして使用することにより、前記仕掛けの前記挙動を推定する為のニューラルネットワークを学習するように構成され、
機械学習アセンブリによって学習されたニューラルネットワークに前記教師データを参照として入力し、
前記教師データに基づいて前記仕掛けの挙動を推定する機械学習アセンブリ、を備える、
ことを特徴とする魚群探知システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、魚群探知システム及び魚群を探知・追跡し表示部に表示する方法に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
通常、魚群探知機は、海底、魚群、または魚群探知機が使用される船舶の下にある他の水の生き物などの水域に存在する物体を検出する為に使用される。魚群探知機システムは、超音波の原理で動作し、通常、送信機と受信機を含む。送信機は、物体を検出できる水域に向けて超音波を送信する。超音波は、障害物として来る物体に当たると反射する性質がある。従って、反射された超音波はその後、受信機によって受信され、さらに処理されて、自船の下の魚群の存在と位置を検出する。
【0003】
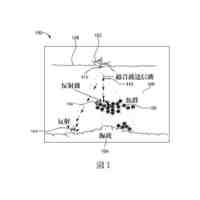
現在、検出された魚群から魚を捕獲する為に、漁師によって異なる仕掛け(釣り針)が使用されている。殆どの場合、バンクシンカー(錘)として知られる一般的な仕掛けは、釣り糸に沿って水面下深くに沈められる。また、魚群の近くに到達して魚を捕まえる為に、釣り糸に接続された複数のフックにも餌を付ける。特定の魚群を狙う為、漁師が水域の下の仕掛けの位置を知っている必要がある。漁師は通常、経験に基づいて位置を予測する。しかし、水面下の仕掛けの位置は、潮の流れと船の挙動や速度に依存する。しかし、船が仕掛けの上にある場合にのみ、仕掛けを検出して表示部に表示する。一方、潮の流れと自船の移動により、船が仕掛けの上に留まり、継続的に仕掛けを表示することは困難である。
【0004】
これらの問題を考慮して、本発明の目的は、表示部上に仕掛けを追跡し、継続的に表示することができる魚群探知システム及び方法を提供することである。
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、船舶に搭載される魚群探知装置システム、方法、及び仕掛けを連続的に表示することができる非過渡的なコンピュータ可読媒体を開示する。本発明の一態様は、送受波器及び自動操舵装置と接続するように構成されたインターフェース(接続装置)を備えた船舶用魚群探知装置システムに関する。送受波器は、超音波信号を水中に送信し、反射エコー信号を受信するように構成される。自動操舵装置は、自船に取り付けられている舵を制御するように構成される。さらに、魚群探知システムは、インターフェースに通信可能に結合された信号処理部を含む。信号処理部は、仕掛けの位置を検出し、船から仕掛けまでのベクトルを算出し、算出されたベクトルに基づいて舵を制御する為の自動操舵装置の為の舵制御信号を生成するように構成される。舵制御信号は、算出されたベクトルをキャンセルするように生成され、その後、仕掛けが表示部に表示される。
【図面の簡単な説明】
【0006】
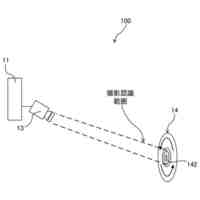
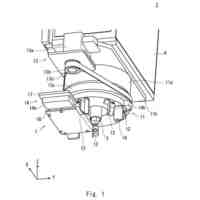
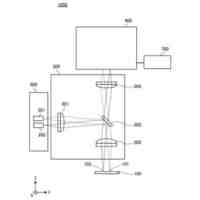
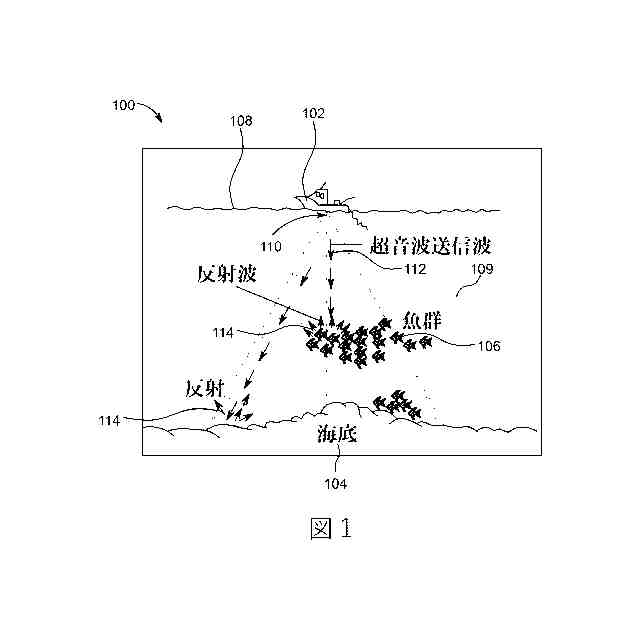
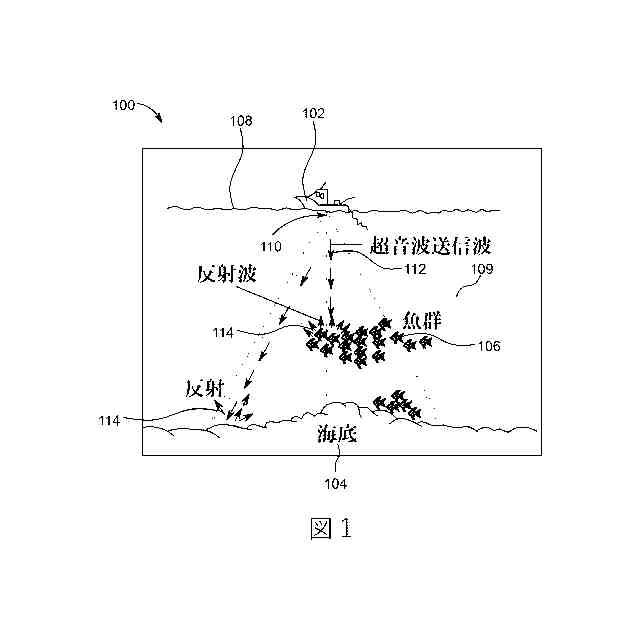
図1は、本発明の一実施形態による透過及び反射超音波を示す概略図である。
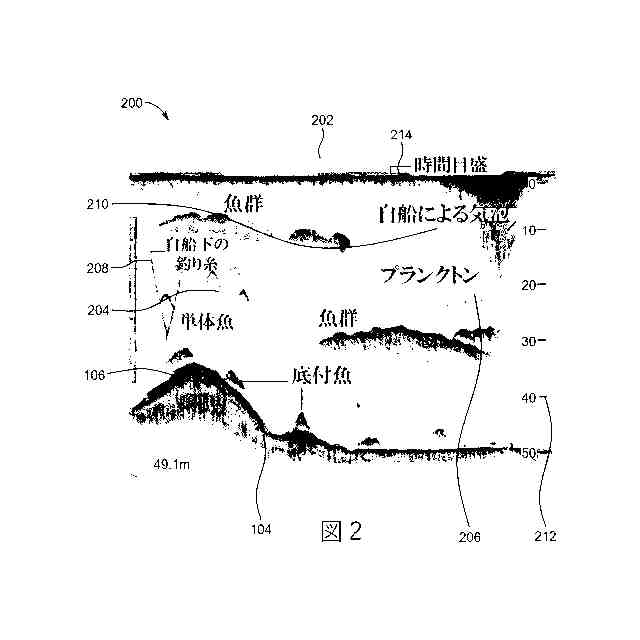
図2は、本発明の一実施形態による魚及び1つ以上の魚群のグラフィカル表示例の魚群探知機表示モードである。
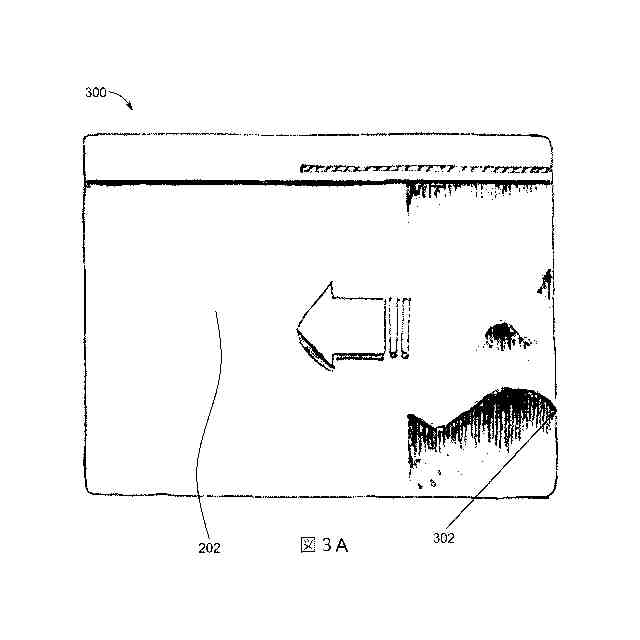
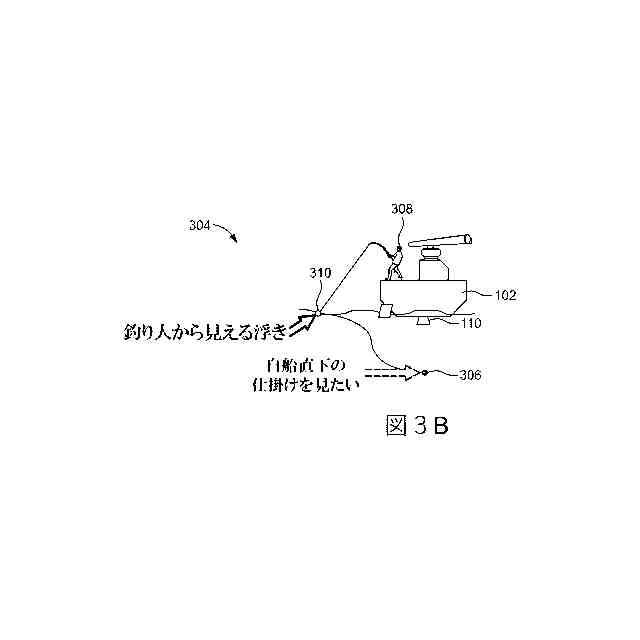
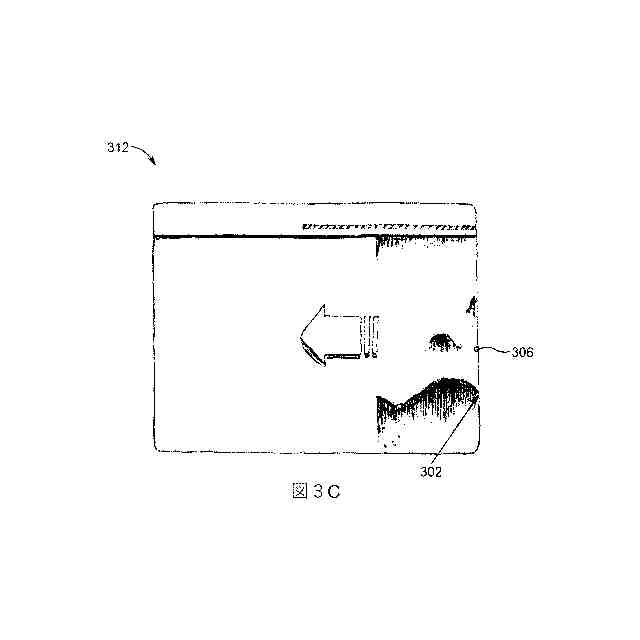
図3Aは、本発明の一実施形態による魚群探知機送受波器による表示部上のエコー画像の時間に対するスクロールを示す画像である。図3Bは、本発明の一実施形態による、魚群探知システムの表示部を表示する為の船の下の仕掛けを示すシステム図である。図3Cは、本発明の一実施形態による、図2Bに示す仕掛けが魚群探知送受波器によって表示部に表示されることを示す画像である。
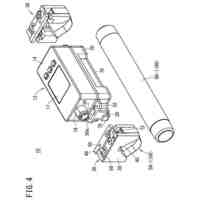
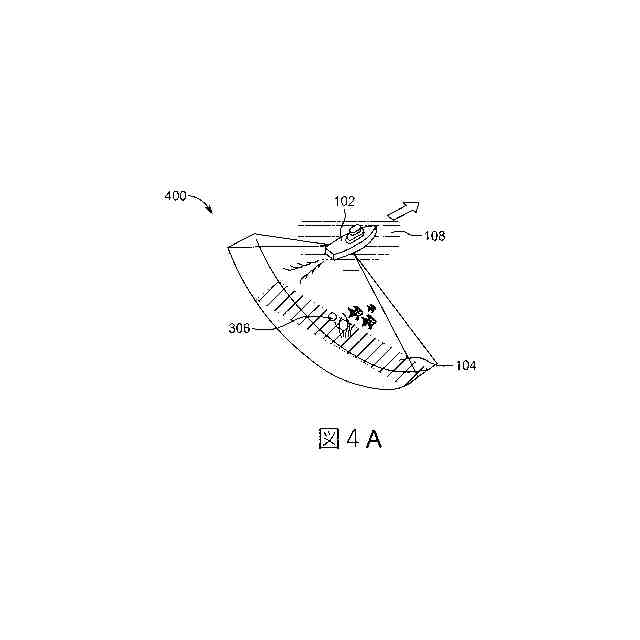
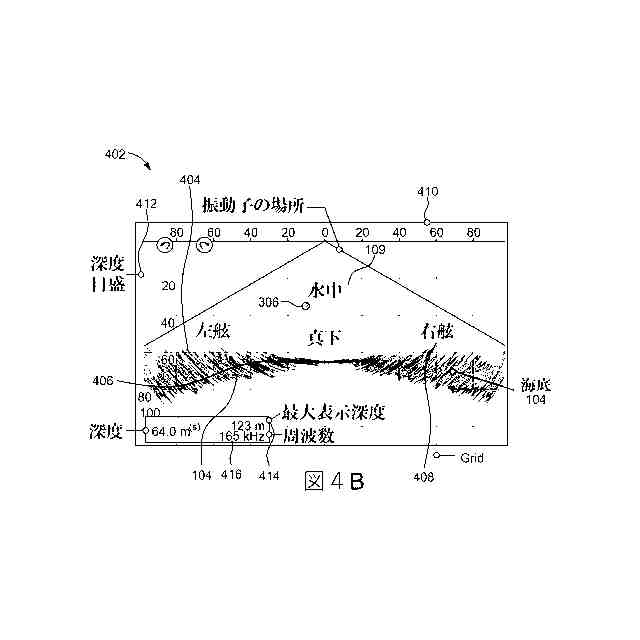
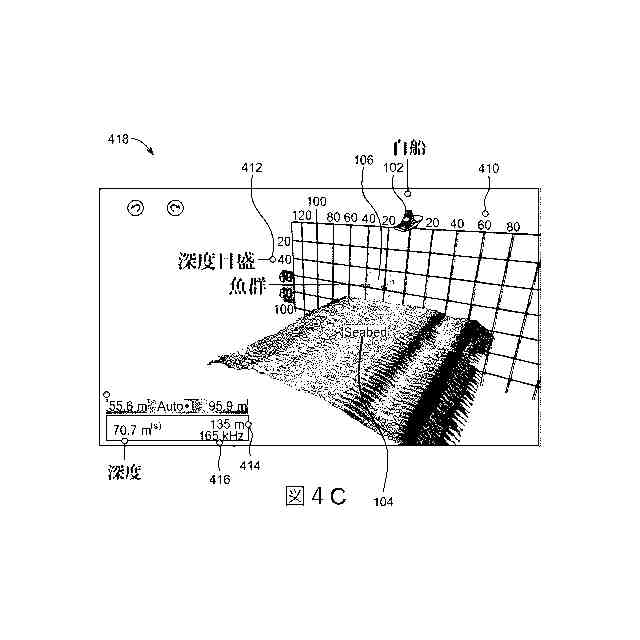
図4Aは、本発明の一実施形態による、魚群探知システムによる仕掛け検出の一例を示す画像である。図4Bは、本発明の一実施形態による、魚群探知システムによる仕掛け検出の表示例を示す図である。図4Cは、本発明の一実施形態による、魚群探知システムによる仕掛け検出の別の表示例を示す図である。
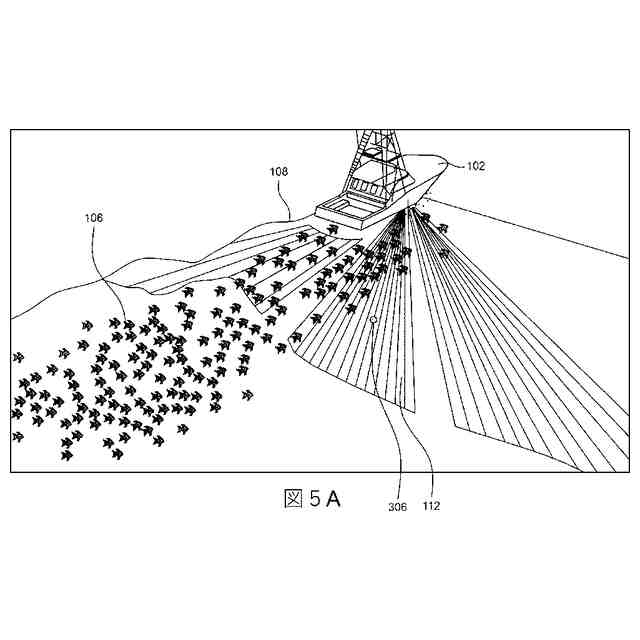
図5Aは、本発明の一実施形態による、魚群探知システムによる仕掛け検出の別の表示例を示す図である。図5Bは、本発明の一実施形態による、図5Aに示す魚群探知システムによる仕掛け検出の表示例を示す図である。図5Cは、本発明の一実施形態による、図5Aに示す魚群探知システムによる仕掛け検出の別の表示例を示す図である。
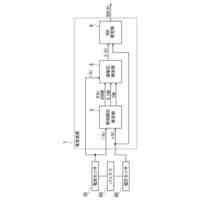
図6は、本発明の一実施形態による、魚群探知システムによる船から仕掛けまでのベクトルを算出する為のブロック図である。
図7Aは、本発明の第1の態様による、魚群探知システムの表示部における少なくとも1つのユーザ入力を受信する為の表示部を示している。図7Bは、本発明の第1の態様による自船の挙動を表示する表示部を示している。図7Cは、本発明の第1の態様による表示部の真下画面に仕掛けを表示する表示部を示している。図7Dは、本発明の第1の態様による表示部の真下画面に仕掛けを表示する表示部と右舷画面を示している。図7Eは、本発明の第1の態様による表示部の右舷画面に仕掛けを表示する表示部を示している。
図8Aは、本発明の一実施形態による表示部の真下画面に仕掛けのサイズが小さくなる表示部を示している。図8Bは、本発明の一実施形態による表示部の真下画面に仕掛けが消えた表示部を示している。
図9は、本発明の第1の態様による、船舶から仕掛けまでのベクトルを算出し、魚群探知システムにより舵制御信号を生成する方法のフローチャートである。
図10は、本発明の第2の態様による、魚群探知システムによる仕掛けの挙動を推定する為のブロック図である。
図11は、本発明の第2の態様による、魚群探知システムによる仕掛けの挙動を推定し、舵制御信号を生成する方法のフローチャートである。
図12は、本発明の第二の態様の一実施形態による機械学習アセンブリのブロック図である。
【発明を実施する為の形態】
【0007】
以下、本発明の実施の形態を図面を参照して説明する。図中の同一又は対応する部分には同一の符号を付し、その説明を省略する。以下に説明する実施形態の少なくともいくつかは任意に組み合わせることができる。
【0008】
図1は、本発明の実施形態による送信及び反射超音波を示す模式図である。
【0009】
図1を参照すると、魚群探知システム100は、海底104及び海面108の下に存在する一つ以上の魚群106のような物体を検出する為に、船舶102に設置される。魚群探知システム100は、船舶102の底部に構成された送受波器110を含む。送受波器110は、超音波信号112を船舶102(海面108)の下の水域109に送信する。超音波信号112は、送信された超音波信号の一部を、その行く手に来る物体に衝突すると反射する傾向がある。
【0010】
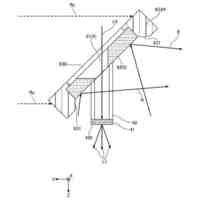
送受波器110は、より実用的な情報を提供する為に、広範囲の深さ及び幅を走査することができるマルチビーム送受波器であってもよい。超音波信号112は、マルチビーム超音波信号であってもよい。マルチビーム超音波信号は、扇形超音波信号であってもよいし、多方向に伝送されるシングルビーム超音波信号であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
回転動作検出システム
1日前
アズビル株式会社
流量センサ
今日
株式会社ヨコオ
接続装置
今日
株式会社東芝
センサ
7日前
株式会社テイエルブイ
流量推定システム
1日前
トヨタ自動車株式会社
温度計測装置
2日前
三晶エムイーシー株式会社
試料容器
8日前
ミツミ電機株式会社
測距装置
今日
三菱マテリアル株式会社
温度センサ
2日前
マレリ株式会社
推定装置
6日前
船井電機株式会社
液体分注装置
今日
株式会社ダイヘン
センサユニット
1日前
ホシデン株式会社
検出装置
7日前
株式会社徳屋
丁張用固定具
2日前
大同特殊鋼株式会社
鋼材の長さ測定方法
今日
株式会社ダイヘン
センサユニット
1日前
株式会社ダイヘン
センサユニット
1日前
株式会社ダイヘン
センサユニット
1日前
株式会社ダイヘン
センサユニット
1日前
株式会社ダイヘン
センサユニット
1日前
株式会社ダイヘン
センサユニット
1日前
株式会社ダイヘン
センサユニット
1日前
株式会社ダイヘン
センサユニット
1日前
合同会社陶徳堂研究所
体液採取器
今日
中国電力株式会社
風煙道漏洩検知システム
8日前
エスペック株式会社
耐電圧試験装置
今日
ミネベアミツミ株式会社
ひずみゲージ
1日前
キヤノン株式会社
組成識別装置
6日前
SMC株式会社
超音波流量センサ
2日前
小野谷機工株式会社
ホイールバランス測定装置
1日前
古野電気株式会社
魚群探知システム及び魚群探知方法
6日前
株式会社テイエルブイ
厚さ測定装置及び厚さ測定方法
1日前
日本電気株式会社
ボロメータ及びその製造方法
6日前
株式会社日立ハイテクサイエンス
X線分析装置
今日
株式会社SCREENホールディングス
撮像方法
9日前
株式会社デンソー
車載システム
7日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ