TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024086352
公報種別
公開特許公報(A)
公開日
2024-06-27
出願番号
2022201439
出願日
2022-12-16
発明の名称
ロボット検査システム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
G01B
11/00 20060101AFI20240620BHJP(測定;試験)
要約
【課題】検査環境の変動を抑制し、検査精度の変動や低下を抑制することのできるロボット検査システムを提供する。
【解決手段】ロボット検査システムは、ロボットを載置する載置台が接続される接続部と、前記接続部と前記載置台との位置決めを行う位置決め機構と、前記接続部に前記載置台が接続された状態で、前記ロボットの検査を行う検査部と、を有する。また、前記載置台は、自動搬送車により前記接続部まで搬送される。また、前記検査部は、前記ロボットに対して複数種類の検査を行う。また、前記接続部は、前記載置台が侵入する侵入口を備える凹部を有し、前記凹部の周囲に前記検査部が配置されている。
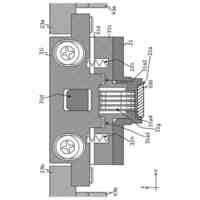
【選択図】図7
特許請求の範囲
【請求項1】
ロボットを載置した載置台が接続される接続部と、
前記接続部と前記載置台との位置決めを行う位置決め機構と、
前記接続部に前記載置台が接続された状態で、前記ロボットの検査を行う検査部と、を有することを特徴とするロボット検査システム。
続きを表示(約 480 文字)
【請求項2】
前記載置台は、自動搬送車により前記接続部まで搬送される請求項1に記載のロボット検査システム。
【請求項3】
前記検査部は、前記ロボットに対して複数種類の検査を行う請求項1に記載のロボット検査システム。
【請求項4】
前記接続部は、前記載置台が侵入する侵入口を備える凹部を有し、
前記凹部の周囲に前記検査部が配置されている請求項1に記載のロボット検査システム。
【請求項5】
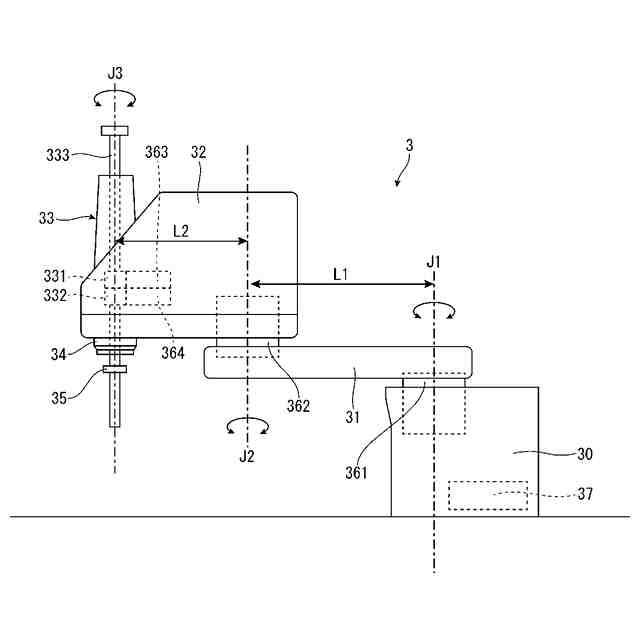
前記ロボットは、ベースと、前記ベースに対して第1回動軸まわりに回動する第1アームと、前記第1アームに対して第2回動軸まわりに回動する第2アームと、前記第2アームに配置されている作業ヘッドと、を有するスカラロボットである請求項1に記載のロボット検査システム。
【請求項6】
前記検査部は、前記第1回動軸および前記第2回動軸の校正を行う校正装置を有する請求項5に記載のロボット検査システム。
【請求項7】
前記校正装置は、水平方向に移動する請求項6に記載のロボット検査システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット検査システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1には、治具シャフトを用いて多関節型ロボットの原点校正を行う方法が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開平5-004179号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の多関節型ロボットの原点校正方法では、検査対象の多関節型ロボットが置かれた場所で治具シャフトを用いて原点校正を行うため、多関節型ロボットが置かれた環境が検査結果に影響する場合がある。そのため、原点校正の精度が変動したり、低下したりするおそれがある。
【課題を解決するための手段】
【0005】
本発明のロボット検査システムは、ロボットを載置した載置台が接続される接続部と、
前記接続部と前記載置台との位置決めを行う位置決め機構と、
前記接続部に前記載置台が接続された状態で、前記ロボットの検査を行う検査部と、を有する。
【図面の簡単な説明】
【0006】
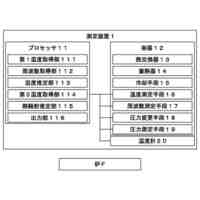
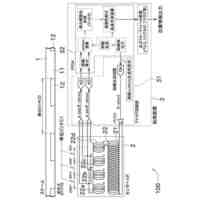
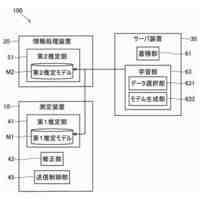
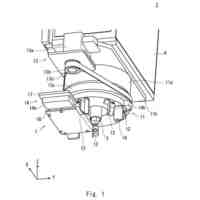
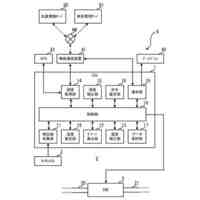
好適な実施形態に係るロボット検査システムの構成図である。
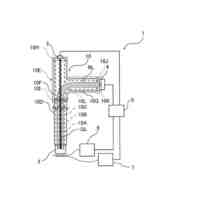
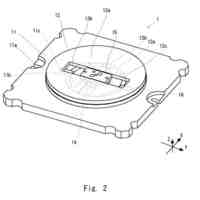
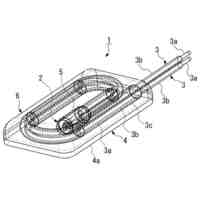
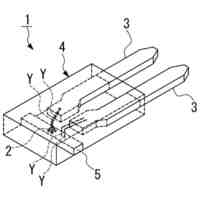
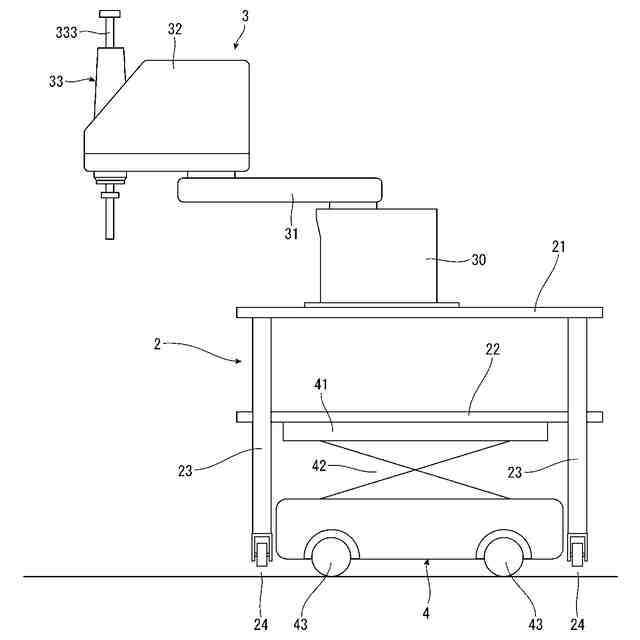
ロボット検査システムで検査されるロボットの一例を示す側面図である。
図2に示すロボットの拡大図である。
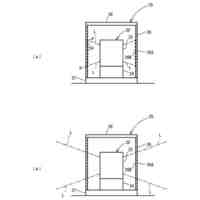
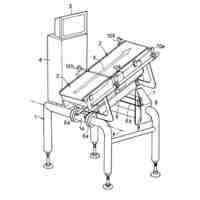
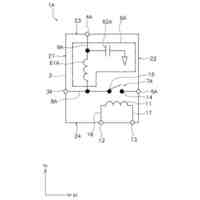
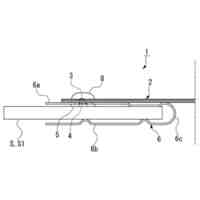
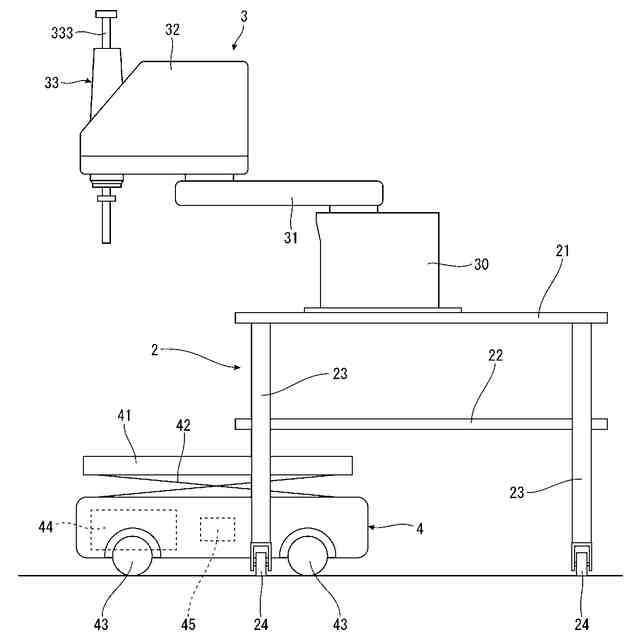
載置台および自動搬送車を示す側面図である。
自動搬送車で載置台を持ち上げた状態を示す側面図である。
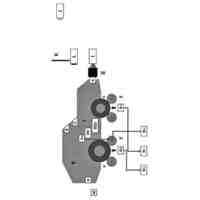
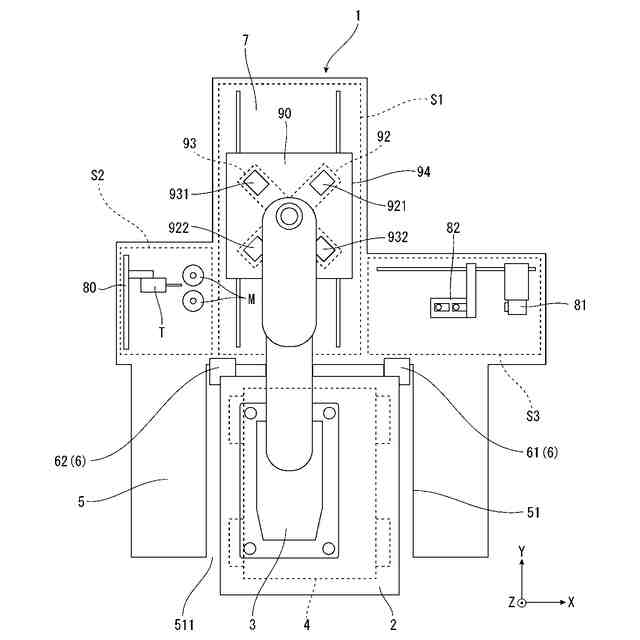
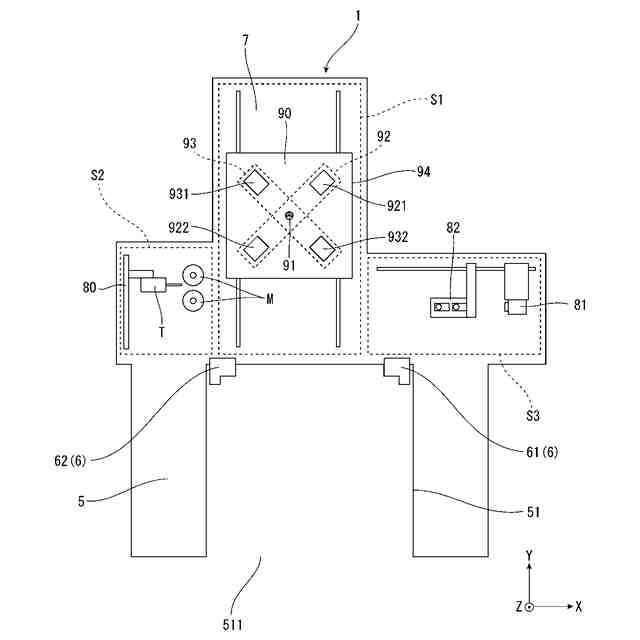
ロボット検査システムの上面図である。
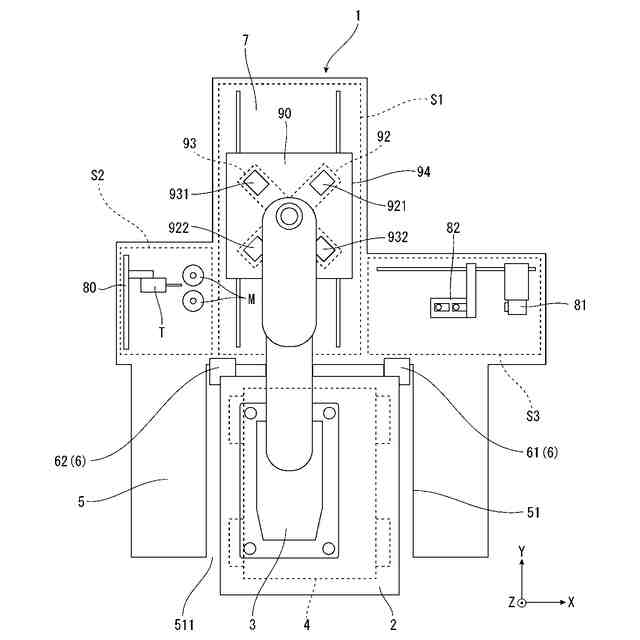
ロボット検査システムに載置台が接続された状態を示す上面図である。
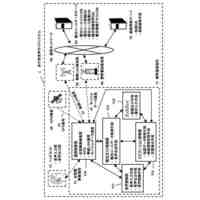
第2領域で行われる作業を示す図である。
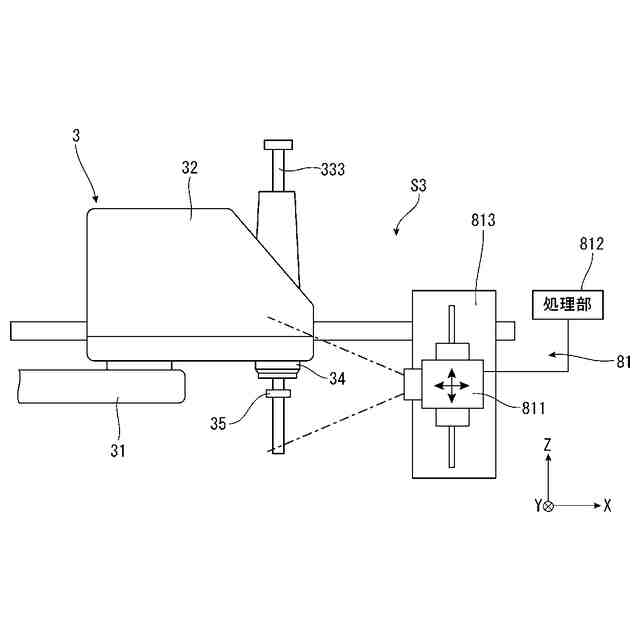
第3領域で行われる作業を示す図である。
第3領域で行われる作業を示す図である。
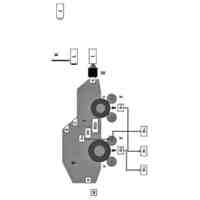
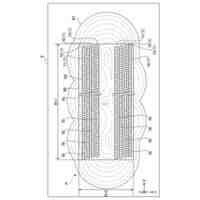
第1領域を示す上面図である。
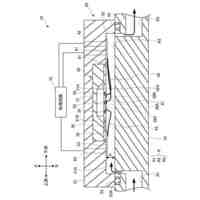
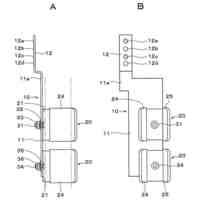
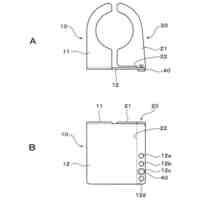
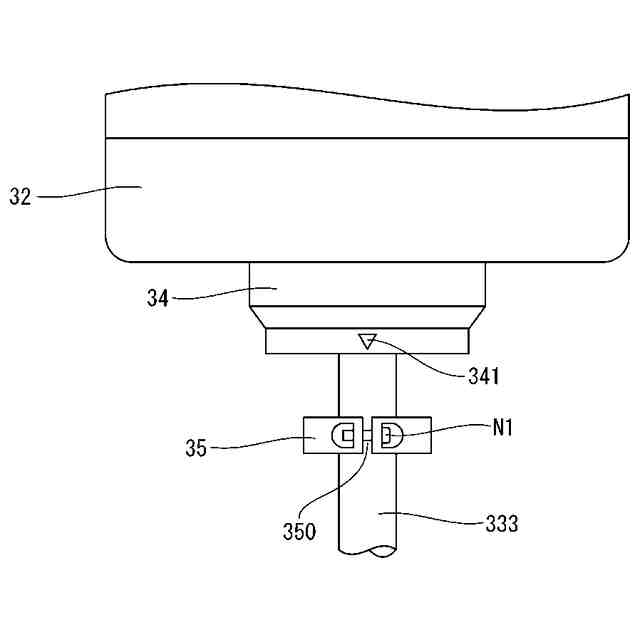
基準ピンの斜視図である。
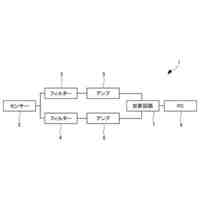
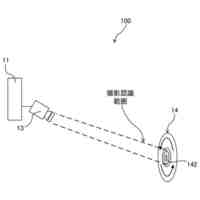
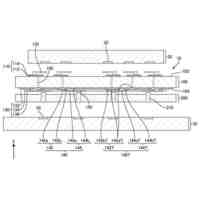
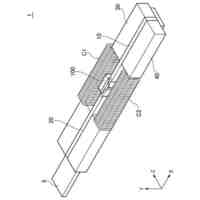
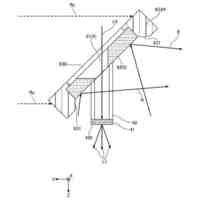
センサーユニットの測定領域内にロボットの先端を位置させた状態を示す斜視図である。
センサーユニットで取得される画像の一例を示す図である。
センサーユニットで取得される画像の一例を示す図である。
センサーユニットで取得される画像の一例を示す図である。
センサーユニットで取得される画像の一例を示す図である。
【発明を実施するための形態】
【0007】
以下、本発明のロボット検査システムを添付図面に示す実施形態に基づいて詳細に説明する。
【0008】
図1は、好適な実施形態に係るロボット検査システムの構成図である。図2は、ロボット検査システムで検査されるロボットの一例を示す側面図である。図3は、図2に示すロボットの拡大図である。図4は、載置台および自動搬送車を示す側面図である。図5は、自動搬送車で載置台を持ち上げた状態を示す側面図である。図6は、ロボット検査システムの上面図である。図7は、ロボット検査システムに載置台が接続された状態を示す上面図である。図8は、第2領域で行われる作業を示す図である。図9および図10は、それぞれ、第3領域で行われる作業を示す図である。図11は、第1領域を示す上面図である。図12は、基準ピンの斜視図である。図13は、センサーユニットの測定領域内にロボットの先端を位置させた状態を示す斜視図である。図14ないし図17は、それぞれ、センサーユニットで取得される画像の一例を示す図である。
【0009】
なお、図1、図6ないし図11に示すように、互いに直交する3軸をX軸、Y軸およびZ軸として図示している。また、以下では、X軸に沿う方向をX軸方向とも言い、Y軸に沿う方向をY軸方向とも言い、Z軸に沿う方向をZ軸方向とも言う。また、各軸の矢印側をプラス側とも言い、反対側をマイナス側とも言う。また、Z軸方向は、鉛直方向に沿っている。
【0010】
図1に示すロボット検査システム1は、載置台2に載置された状態で搬送されてきたロボット3に対して所定の検査を行う装置である。つまり、従来のように各ロボット3が設置された場所でロボット3毎に検査を行うのではなく、反対に、全てのロボット3をロボット検査システム1まで搬送して検査する。このようなシステムによれば、全てのロボット3を同じ場所、同じ環境で検査することができるため、ロボット3毎に検査精度がばらつき難くなる。したがって、全てのロボット3について、安定した、かつ、高い精度の検査を行うことができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オンキヨー株式会社
システム
15日前
横河電機株式会社
光学プローブ
15日前
個人
歩行者音声ガイドシステム
26日前
株式会社ヨコオ
検査治具
27日前
個人
回転動作検出システム
1日前
昭電工業株式会社
測定装置
28日前
太陽誘電株式会社
検出装置
22日前
株式会社豊田自動織機
無人走行体
1か月前
アズビル株式会社
流量センサ
今日
大和製衡株式会社
重量選別機
20日前
株式会社ヨコオ
接続装置
今日
キーコム株式会社
試験システム
1か月前
株式会社ニシヤマ
物品取付装置
23日前
矢崎総業株式会社
センサ
22日前
村田機械株式会社
変位検出装置
1か月前
株式会社東芝
センサ
7日前
キーコム株式会社
試験システム
1か月前
トヨタ自動車株式会社
測定治具
1か月前
株式会社ニシヤマ
物品取付装置
23日前
個人
氷河融雪水流出量の推定方法
14日前
株式会社テイエルブイ
流量推定システム
1日前
大同特殊鋼株式会社
形状検出装置
22日前
TDK株式会社
磁気センサ
27日前
株式会社ミツトヨ
光学式エンコーダ
28日前
オムロン株式会社
スイッチング装置
1か月前
三晶エムイーシー株式会社
試料容器
8日前
三菱マテリアル株式会社
温度センサ
15日前
トヨタ自動車株式会社
温度計測装置
2日前
株式会社島津製作所
分析装置
22日前
トヨタ自動車株式会社
劣化推定装置
23日前
株式会社不二越
X線測定装置
1か月前
三菱マテリアル株式会社
温度センサ
23日前
ミツミ電機株式会社
測距装置
今日
三菱マテリアル株式会社
温度センサ
2日前
東海電子株式会社
アルコール測定装置
15日前
日本メクトロン株式会社
部品実装基板
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ