TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024083929
公報種別
公開特許公報(A)
公開日
2024-06-24
出願番号
2022198026
出願日
2022-12-12
発明の名称
ロボットシステムおよびコントローラ
出願人
オムロン株式会社
代理人
弁理士法人深見特許事務所
主分類
B25J
13/00 20060101AFI20240617BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ねじの回転に連動させてねじ締めドライバの位置決めを行う技術を提供する。
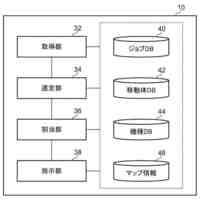
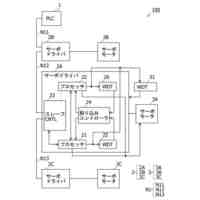
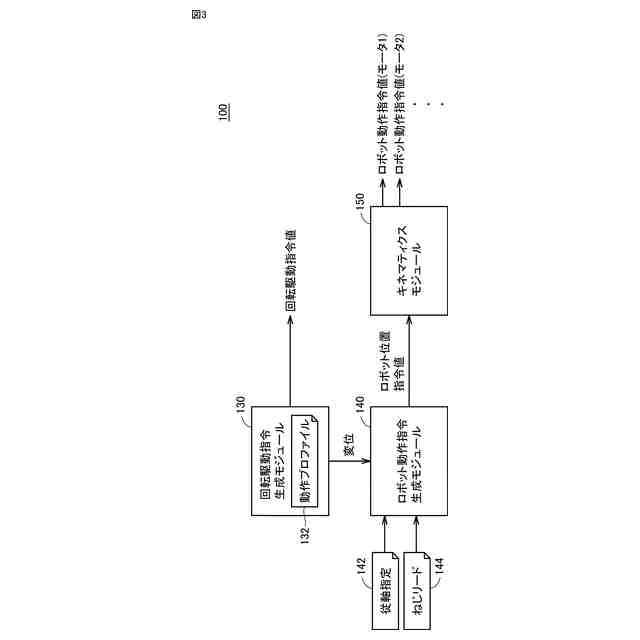
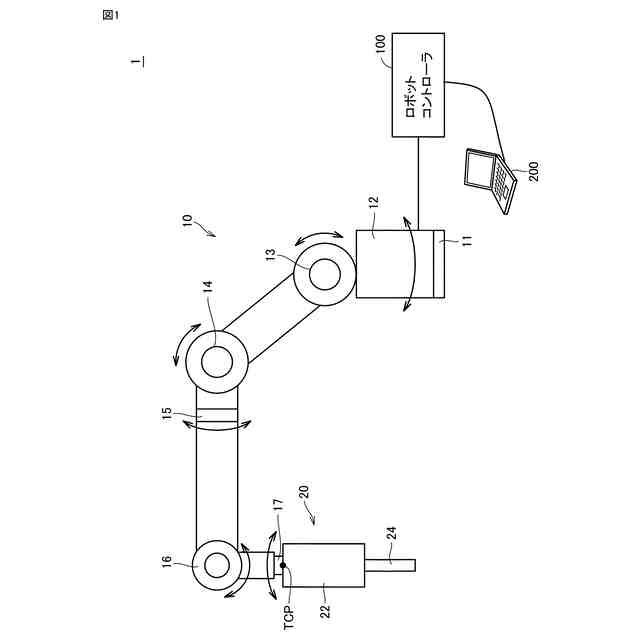
【解決手段】ロボットシステムは、エンドエフェクタとして、ねじ締めを行うためのねじ締めドライバが取り付けられたロボットと、ロボットを制御するコントローラとを含む。コントローラは、予め定められた動作プロファイルに従って、ねじ締めドライバを回転させるための指令を生成する第1指令生成モジュールと、ねじ締めドライバを予め定められた方向に沿って、第1指令生成モジュールが生成する指令に応じて算出される変位だけ移動させるように指令を生成する第2指令生成モジュールとを含む。
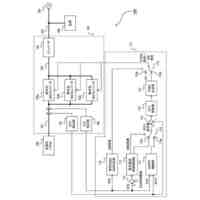
【選択図】図3
特許請求の範囲
【請求項1】
ロボットシステムであって、
エンドエフェクタとして、ねじ締めを行うためのねじ締めドライバが取り付けられたロボットと、
前記ロボットを制御するコントローラとを備え、
前記コントローラは、
予め定められた動作プロファイルに従って、前記ねじ締めドライバを回転させるための指令を生成する第1指令生成モジュールと、
前記ねじ締めドライバを予め定められた方向に沿って、前記第1指令生成モジュールが生成する指令に応じて算出される変位だけ移動させるように指令を生成する第2指令生成モジュールとを備える、ロボットシステム。
続きを表示(約 740 文字)
【請求項2】
前記動作プロファイルは、時間に対する前記ねじ締めドライバの累積角度の変化を規定する、請求項1に記載のロボットシステム。
【請求項3】
前記第2指令生成モジュールは、前記第1指令生成モジュールが生成する指令が示す第1変位に係数を乗じて算出される第2変位を指令として出力する、請求項1または2に記載のロボットシステム。
【請求項4】
前記係数は、前記ねじ締めドライバが回転駆動するねじのリードに依存して決定されている、請求項1~3のいずれか1項に記載のロボットシステム。
【請求項5】
前記ねじ締めドライバが回転駆動するねじの種類に応じて、複数の前記係数のうち対応する係数が選択される、請求項4に記載のロボットシステム。
【請求項6】
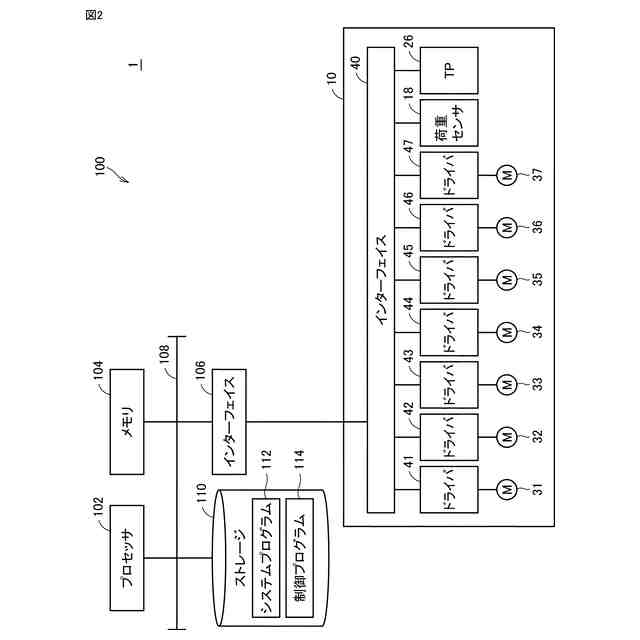
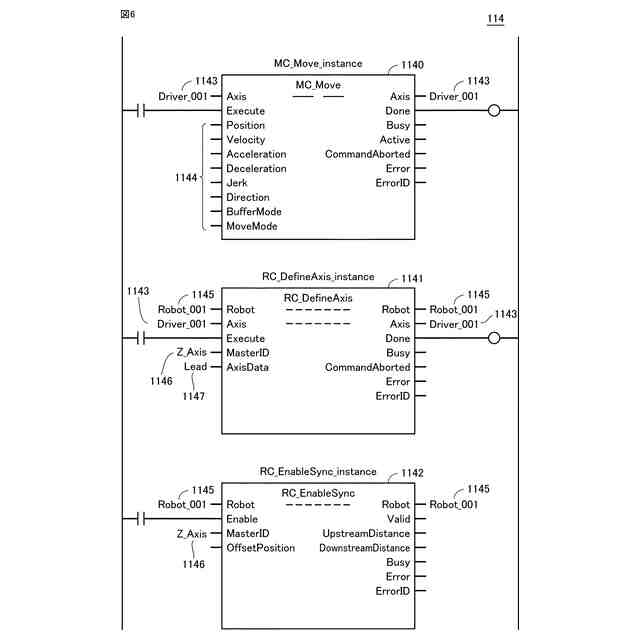
前記コントローラのプロセッサが制御プログラムを実行するように構成されており、
前記制御プログラムは、前記第1指令生成モジュールおよび前記第2指令生成モジュールをそれぞれ規定するためのファンクションブロックを含む、請求項1~5のいずれか1項に記載のロボットシステム。
【請求項7】
エンドエフェクタとして、ねじ締めを行うためのねじ締めドライバが取り付けられたロボットを制御するコントローラであって、
予め定められた動作プロファイルに従って、前記ねじ締めドライバを回転させるための指令を生成する第1指令生成モジュールと、
前記ねじ締めドライバを予め定められた方向に沿って、前記第1指令生成モジュールが生成する指令に応じて算出される変位だけ移動させるように指令を生成する第2指令生成モジュールとを備える、コントローラ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットシステムおよびコントローラに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
産業オートメーション(Industrial Automation)の分野において、様々な用途にロボットが利用されている。用途に応じて、ロボットを可能な限り正確に制御することが要求される。
【0003】
ロボットの応用の一例として、ねじ締め処理がある。例えば、特開2021-122867号公報(特許文献1)は、ねじをワークに螺入する際、当該ねじがワークに着座する手前でねじに係合したビットの回転速度を切り替え制御し、着座時に発生する衝撃トルクを低減可能な自動ねじ締め装置を開示する。
【先行技術文献】
【特許文献】
【0004】
特開2021-122867号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述の先行技術は、ビットの回転速度(設定値)を切り替える構成を開示するが、ねじ締め過程に生じる抵抗などの機械的な外乱によって、ビットの実際の回転速度は変動し得る。ビットの回転速度が変動した場合には、ねじ締めドライバの下降速度や高さも当該変動に合わせて調整する必要がある。このようなビットの回転速度に応じて、ねじ締めドライバの下降速度や高さの調整には手間がかかる。
【0006】
本発明は、ねじの回転に連動させてねじ締めドライバの位置決めを行う技術を提供する。
【課題を解決するための手段】
【0007】
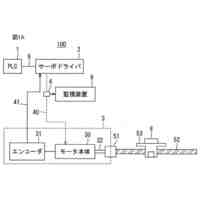
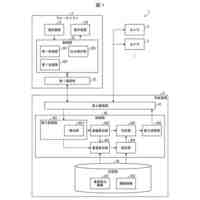
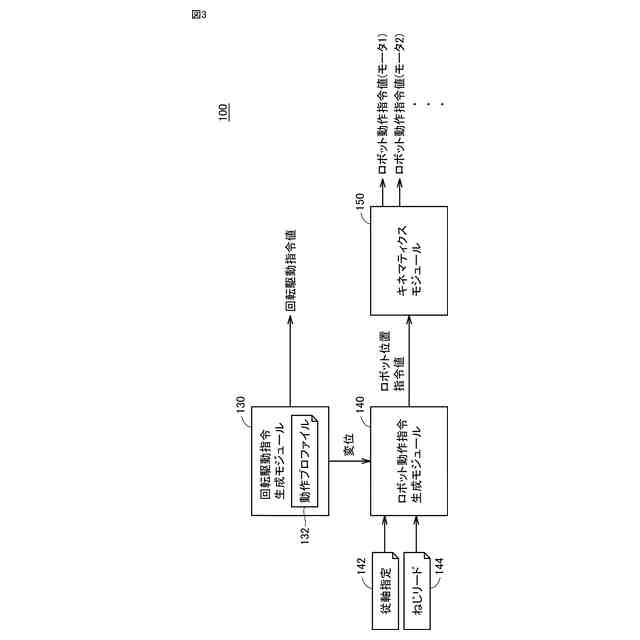
ある実施の形態に従うロボットシステムは、エンドエフェクタとして、ねじ締めを行うためのねじ締めドライバが取り付けられたロボットと、ロボットを制御するコントローラとを含む。コントローラは、予め定められた動作プロファイルに従って、ねじ締めドライバを回転させるための指令を生成する第1指令生成モジュールと、ねじ締めドライバを予め定められた方向に沿って、第1指令生成モジュールが生成する指令に応じて算出される変位だけ移動させるように指令を生成する第2指令生成モジュールとを含む。
【0008】
この構成によれば、予め定められた動作プロファイルに従ってねじ締めドライバを回転させることで、ねじの係合によるねじの位置を制御できる。併せて、ねじの位置に応じて、ねじ締めドライバの適切な位置を決定できる。
【0009】
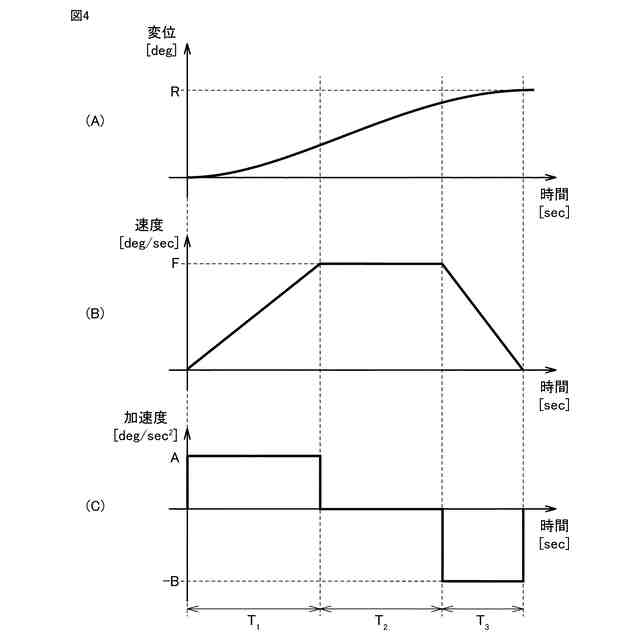
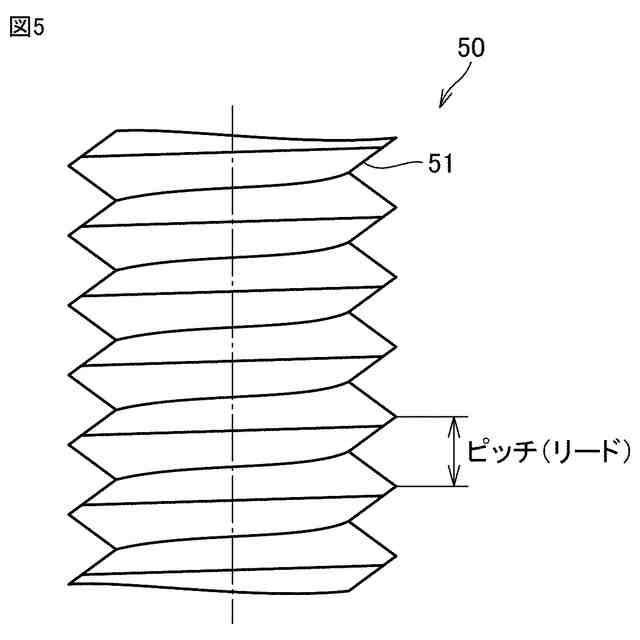
動作プロファイルは、時間に対するねじ締めドライバの累積角度の変化を規定するようにしてもよい。この構成によれば、目的に応じて、ねじの係合の過程を制御できる。
【0010】
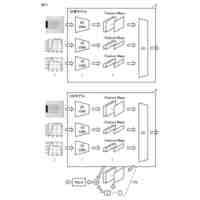
第2指令生成モジュールは、第1指令生成モジュールが生成する指令が示す第1変位に係数を乗じて算出される第2変位を指令として出力するようにしてもよい。この構成によれば、第1指令生成モジュールが生成する指令が示す第1変位に対して線形性を維持した第2変位を指令として出力できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
モータ
9日前
オムロン株式会社
スイッチ
2日前
オムロン株式会社
スイッチ
2日前
オムロン株式会社
電磁継電器
2日前
オムロン株式会社
電磁継電器
9日前
オムロン株式会社
電磁継電器
9日前
オムロン株式会社
電力変換装置
9日前
オムロン株式会社
コントローラ
2日前
オムロン株式会社
電力変換装置
9日前
オムロン株式会社
フィルタ装置
2日前
オムロン株式会社
非接触給電装置
9日前
オムロン株式会社
非接触給電装置
9日前
オムロン株式会社
非接触給電装置
9日前
オムロン株式会社
リミットスイッチ
5日前
オムロン株式会社
電子機器システム
5日前
オムロン株式会社
測定システム及び測定方法
5日前
オムロン株式会社
運用支援方法及びシステム
5日前
オムロン株式会社
検査装置及び対象物検知方法
5日前
オムロン株式会社
X線検査装置及びその制御方法
2日前
オムロン株式会社
外観検査装置、及び外観検査方法
9日前
オムロン株式会社
情報処理システム及びプログラム
2日前
オムロン株式会社
情報処理システム及びプログラム
2日前
オムロン株式会社
外観検査装置、及び外観検査方法
9日前
オムロン株式会社
出力電圧保持装置および電源装置
5日前
オムロン株式会社
サーボドライバ及びサーボシステム
2日前
オムロン株式会社
処理装置、処理方法及びプログラム
5日前
オムロン株式会社
処理装置、処理方法及びプログラム
2日前
オムロン株式会社
回転機監視装置及び回転機監視方法
2日前
オムロン株式会社
処理装置、処理方法及びプログラム
2日前
オムロン株式会社
判定装置、制御方法および荷物搬送装置
5日前
オムロン株式会社
情報処理装置および情報処理プログラム
9日前
オムロン株式会社
情報処理装置および情報処理プログラム
9日前
オムロン株式会社
ホイールユニットおよびこれを備えたマウス
9日前
オムロン株式会社
回転体ユニットおよびこれを備えた操作装置
9日前
オムロン株式会社
X線検査装置、モデル生成方法及び検査方法
2日前
オムロン株式会社
情報処理装置、情報処理方法およびプログラム
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ