TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024129667
公報種別
公開特許公報(A)
公開日
2024-09-27
出願番号
2023039016
出願日
2023-03-13
発明の名称
サーボドライバ及びサーボシステム
出願人
オムロン株式会社
代理人
弁理士法人秀和特許事務所
主分類
H02P
5/46 20060101AFI20240919BHJP(電力の発電,変換,配電)
要約
【課題】制御部に異常が発生した際に、他のモータとの協調したモータ停止を支援する。
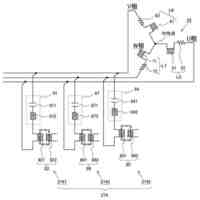
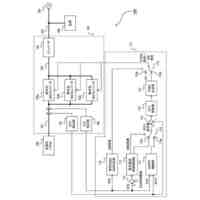
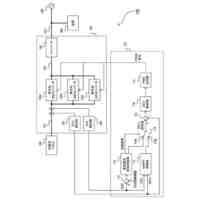
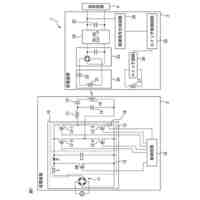
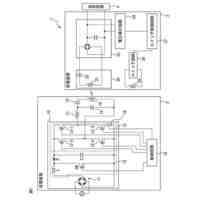
【解決手段】本サーボドライバは、第1のモータを駆動するサーボドライバである。本サーボドライバは、第2のモータが接続される第2のサーボドライバと、上記サーボドライバ及び上記第2のサーボドライバに指令信号を送信する上位装置と、に接続される通信部と、上記通信部を制御する第1の制御部と、上記第1の制御部を監視する第2の制御部と、を備える。上記第2の制御部は、上記第1の制御部に異常が発生した場合には、上記第1の制御部を停止させるとともに、上記第1のモータと上記第2のモータとの協調停止に係る情報を上記通信部を介して上記上位装置に送信する。
【選択図】図1
特許請求の範囲
【請求項1】
第1のモータを駆動するサーボドライバであって、
第2のモータが接続される第2のサーボドライバと、前記サーボドライバ及び前記第2のサーボドライバに指令信号を送信する上位装置と、に接続される通信部と、
前記通信部を制御する第1の制御部と、
前記第1の制御部を監視する第2の制御部と、を備え、
前記第2の制御部は、
前記第1の制御部に異常が発生した場合には、前記第1の制御部を停止させるとともに、前記第1のモータと前記第2のモータとの協調停止に係る情報を前記通信部を介して前記上位装置に送信する、
サーボドライバ。
続きを表示(約 1,100 文字)
【請求項2】
前記協調停止に係る情報は、前記第1の制御部に異常が発生したことを示す情報と前記第1のモータの動作状態を示すフィードバック信号とを含む、
請求項1に記載のサーボドライバ。
【請求項3】
前記第2の制御部は、
前記協調停止に係る情報を受信した前記上位装置から、前記第1のモータと前記第2のモータを協調停止させる指令信号を受信すると、前記指令信号にしたがって前記第1のモータを停止させる、
請求項1に記載のサーボドライバ。
【請求項4】
前記サーボドライバには、前記第1の制御部及び前記第2の制御部の双方を前記サーボドライバの外部から監視する監視部が接続され、
前記監視部は、前記第1の制御部及び前記第2の制御部の双方で異常が発生した場合には、前記サーボドライバを停止させる、
請求項1に記載のサーボドライバ。
【請求項5】
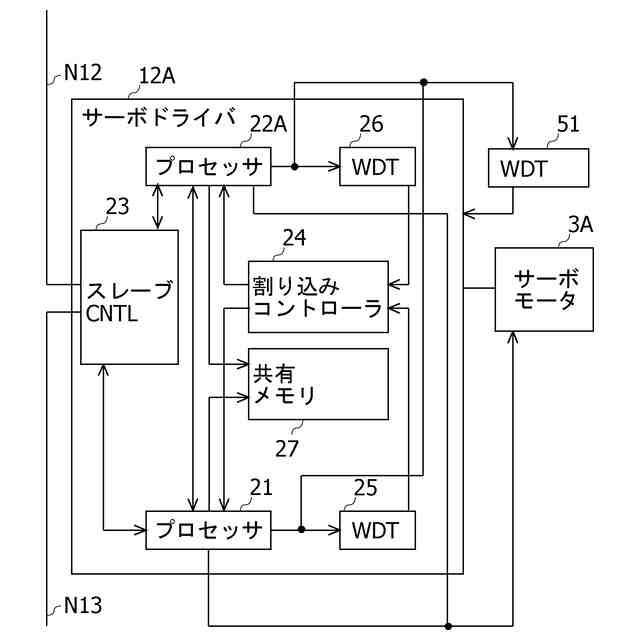
前記第1の制御部と前記第2の制御部の双方からアクセスされる共有メモリをさらに備え、
前記第1の制御部は、前記通信部の制御に係る情報を前記共有メモリに記憶させ、
前記第1の制御部に異常が発生した場合には、前記第2の制御部は、前記共有メモリを参照して、前記通信部の制御を前記第1の制御部から引き継ぐ、
請求項1から4のいずれか一項に記載のサーボドライバ。
【請求項6】
第1のモータを駆動する第1のサーボドライバと、第2のモータを駆動する第2のサーボドライバと、前記第1のサーボドライバ及び前記第2のサーボドライバに指令信号を送信する上位装置と、を備えるサーボシステムであって、
前記第1のサーボドライバは、
前記第2のサーボドライバ及び前記上位装置に接続される通信部と、
前記通信部を制御する第1の制御部と、
前記第1の制御部を監視する第2の制御部と、を有し、
前記第2の制御部は、
前記第1の制御部に異常が発生した場合には、前記第1の制御部を停止させるとともに、前記第1のモータと前記第2のモータとの協調停止に係る情報を前記通信部を介して前記上位装置に送信し、
前記第2のサーボドライバは、前記第2のモータの動作状態を示すフィードバック信号を前記上位装置に送信し、
前記上位装置は、
前記協調停止に係る情報及び前記フィードバック信号を受信すると、受信した前記協調停止に係る情報及び前記フィードバック信号を基に、前記第1のモータと前記第2のモータを協調停止させる指令信号を前記第1のサーボドライバ及び前記第2のサーボドライバに送信する、
サーボシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、サーボドライバ及びサーボシステムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
サーボドライバを制御するプロセッサをウォッチドッグタイマ回路に監視させ、プロセッサの動作に異常が発生した場合にプロセッサをリセットする一方で、通信を制御するスレーブコントローラの動作は停止させない技術が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2019-074844号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
スレーブコントローラが停止されなければ通信を維持することはできる。しかしながら、複数軸を備えるサーボシステムにおいて、一部のサーボドライバが有するプロセッサに異常が発生した場合、他の軸と協調して停止することが好ましい場合がある。このような場合、単に通信を維持しただけでは他の軸と協調して停止することはできないため、改善の余地があった。
【0005】
開示の技術の1つの側面は、制御部に異常が発生した際に、他のモータとの協調したモータ停止を支援できるサーボドライバ及びサーボシステムを提供することを目的とする。
【課題を解決するための手段】
【0006】
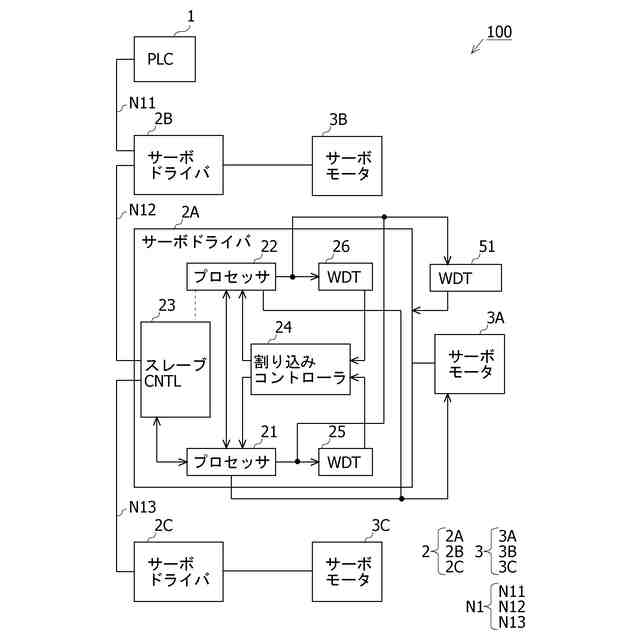
開示の技術の1つの側面は、次のようなサーボドライバによって例示される。本サーボドライバは、第1のモータを駆動するサーボドライバである。本サーボドライバは、第2のモータが接続される第2のサーボドライバと、上記サーボドライバ及び上記第2のサーボドライバに指令信号を送信する上位装置に接続される通信部と、上記通信部を制御する第1の制御部と、上記第1の制御部を監視する第2の制御部と、を備える。上記第2の制御部は、上記第1の制御部に異常が発生した場合には、上記第1の制御部を停止させるとともに、上記第1のモータと上記第2のモータとの協調停止に係る情報を上記通信部を介して上記上位装置に送信する。
【0007】
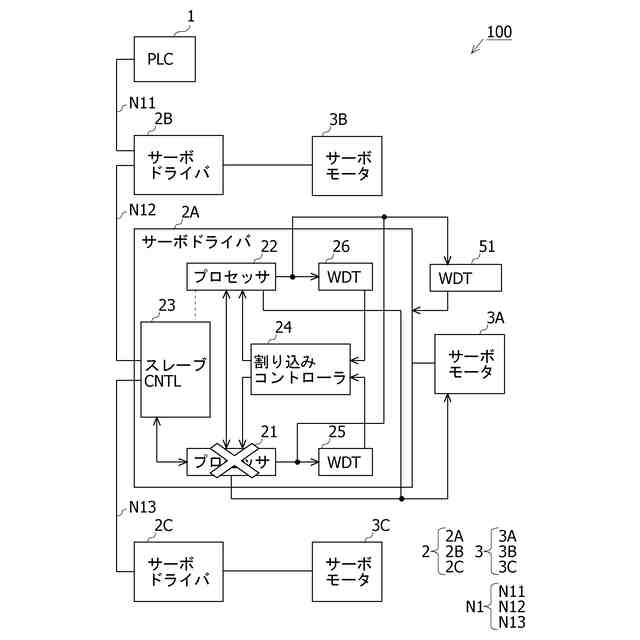
本サーボドライバによれば、上記第1の制御部に異常が発生した場合でも、上記通信部は停止されない。そして、本サーボドライバでは、上記第2の制御部から上記上位装置に対して、上記第1のモータと上記第2のモータとの協調停止に係る情報が上記通信部を介して送信される。このような協調停止に係る情報を用いることで、上記上位装置は、上記第1のモータと上記第2のモータとを協調停止させる指令信号を出力することもできるようになる。そのため、本サーボドライバは、上記第1の制御部に異常が発生しても上記第1のモータと上記第2のモータと協調したモータ停止を支援できる。
【0008】
本サーボドライバは、次の特徴をさらに備えてもよい。上記協調停止に係る情報は、上記第1の制御部に異常が発生したことを示す情報と上記第1のモータの動作状態を示すフィードバック信号とを含む。本サーボドライバは、このような特徴を備えることで、第1の制御部に異常が発生したこと及び上記第1のモータの動作状態を上記上位装置に通知できる。
【0009】
本サーボドライバは、次の特徴をさらに備えてもよい。上記第2の制御部は、上記協調停止に係る情報を受信した上記上位装置から、上記第1のモータと上記第2のモータを協調停止させる指令信号を受信すると、上記指令信号にしたがって上記第1のモータを停止させる。本サーボドライバは、このような特徴を備えることで、上記第2のモータと協調して、上記第1のモータを停止させることができる。
【0010】
本サーボドライバは、次の特徴をさらに備えてもよい。上記サーボドライバには、上記第1の制御部及び上記第2の制御部の双方を上記サーボドライバの外部から監視する監視部が接続され、上記監視部は、上記第1の制御部及び上記第2の制御部の双方で異常が発生した場合には、上記サーボドライバを停止させる。上記第1の制御部及び上記第2の制御部の双方で異常が発生した場合、上記第1の制御部及び上記第2の制御部のいずれによっても本サーボドライバを制御できなくなる虞がある。このような場合に、上記監視部によって本サーボドライバを停止させることで、上記第1の制御部及び上記第2の制御部の双方で異常が発生したままの状態で本サーボドライバが継続して駆動することを抑制できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
モータ
8日前
オムロン株式会社
端子台
16日前
オムロン株式会社
電気機器
9日前
オムロン株式会社
電気機器
16日前
オムロン株式会社
電子機器
1か月前
オムロン株式会社
電子機器
1か月前
オムロン株式会社
検査装置
1か月前
オムロン株式会社
ソケット
16日前
オムロン株式会社
スイッチ
1日前
オムロン株式会社
スイッチ
1日前
オムロン株式会社
電磁継電器
1日前
オムロン株式会社
電磁継電器
8日前
オムロン株式会社
センサ装置
1か月前
オムロン株式会社
電磁継電器
8日前
オムロン株式会社
電動把持工具
15日前
オムロン株式会社
コントローラ
1日前
オムロン株式会社
粒子計測装置
1か月前
オムロン株式会社
電力変換装置
8日前
オムロン株式会社
フィルタ装置
1日前
オムロン株式会社
電力変換装置
8日前
オムロン株式会社
粒子計測装置
1か月前
オムロン株式会社
非接触給電装置
8日前
オムロン株式会社
充放電システム
9日前
オムロン株式会社
非接触給電装置
8日前
オムロン株式会社
トリガスイッチ
1か月前
オムロン株式会社
トリガスイッチ
15日前
オムロン株式会社
非接触給電装置
8日前
オムロン株式会社
生体情報処理方法
1か月前
オムロン株式会社
自律作業システム
1か月前
オムロン株式会社
電子機器システム
4日前
オムロン株式会社
リミットスイッチ
4日前
オムロン株式会社
生体情報処理システム
1か月前
オムロン株式会社
経路情報提供システム
25日前
オムロン株式会社
制御装置、及び制御方法
2か月前
オムロン株式会社
検出装置および操作装置
29日前
オムロン株式会社
操作装置及び操作システム
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ