TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024128866
公報種別
公開特許公報(A)
公開日
2024-09-24
出願番号
2023038130
出願日
2023-03-10
発明の名称
運用支援方法及びシステム
出願人
オムロン株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
G05D
1/43 20240101AFI20240913BHJP(制御;調整)
要約
【課題】電池で駆動する複数の移動体に効率的にジョブを実行させる。
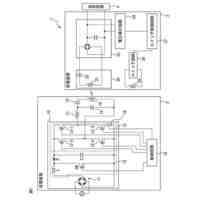
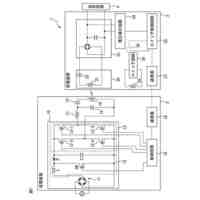
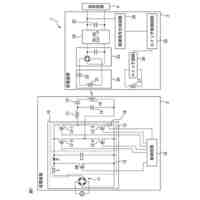
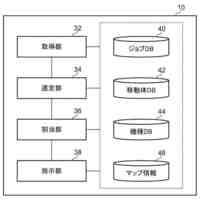
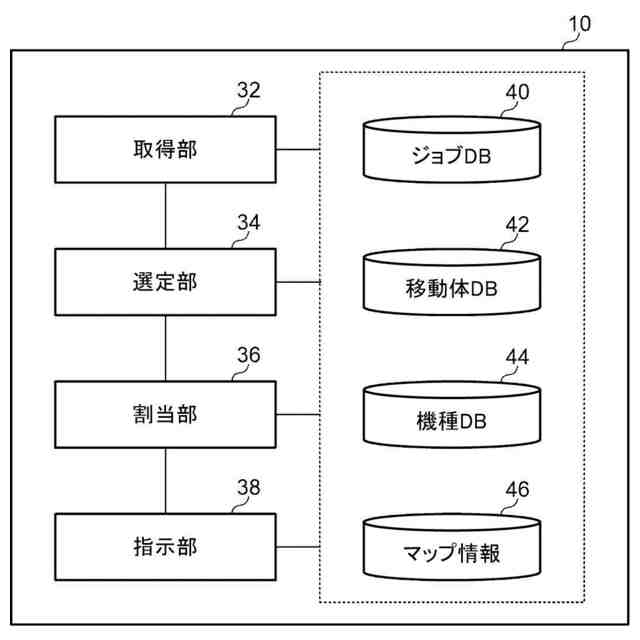
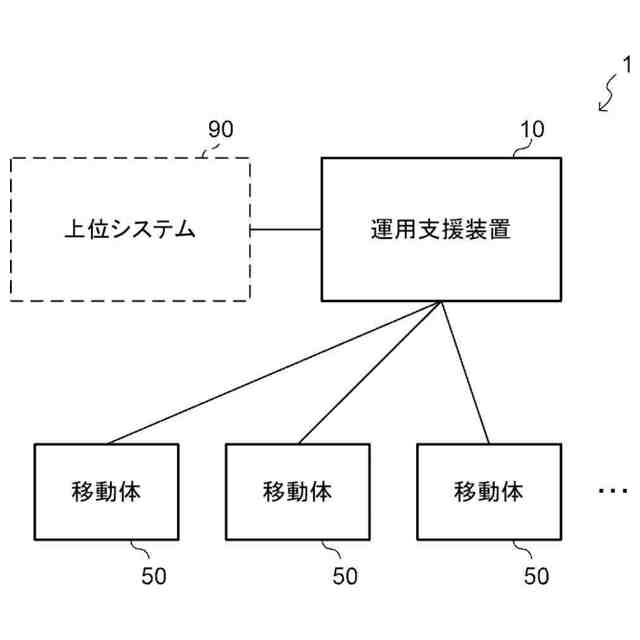
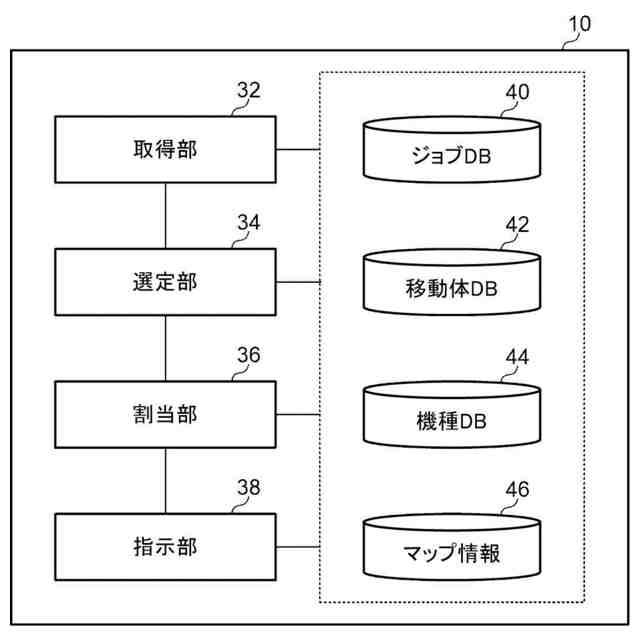
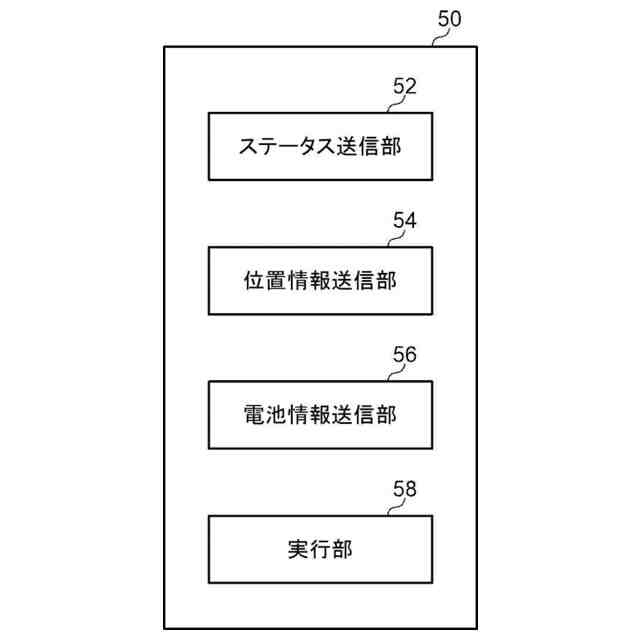
【解決手段】電池で駆動する複数の移動体50と、複数のジョブを実行させるように複数の移動体50へのジョブの割り当てを制御する運用支援装置10とを含む運用支援システム1であって、運用支援装置10は、移動体の各々の電池の状態を示す電池情報を取得すると共に、実行を指示されたジョブに関するジョブ情報を取得する取得部32と、取得されたジョブ情報が示すジョブの実行を、取得された電池情報に基づいて、複数の移動体のいずれかに割り当てる割当部36と、複数の移動体のいずれかに、割り当てたジョブを実行させるように指示する指示部38と、を含む。
【選択図】図3
特許請求の範囲
【請求項1】
運用支援装置が、複数のジョブを実行させるように、電池で駆動する複数の移動体へのジョブの割り当てを制御する運用支援方法であって、
前記移動体の各々の電池の状態を示す電池情報を取得すること、
実行を指示されたジョブに関するジョブ情報を取得することと、
取得された前記ジョブ情報が示すジョブの実行を、取得された前記電池情報に基づいて、前記複数の移動体のいずれかに割り当てることと、
前記複数の移動体のいずれかに、割り当てたジョブを実行させるように指示することと、
を含む運用支援方法。
続きを表示(約 1,500 文字)
【請求項2】
前記ジョブ情報は、前記ジョブの実行に要する電力を算出するための情報を含み、
前記電池情報は、前記複数の移動体の各々の電池残量を含み、
前記ジョブ情報に基づいて算出される前記ジョブの実行に要する電力と、前記電池情報が示す前記複数の移動体の各々の電池残量とを比較して、前記ジョブの実行を、前記複数の移動体のいずれかに割り当てる
請求項1に記載の運用支援方法。
【請求項3】
取得された前記ジョブ情報が示すジョブの実行を、前記複数の移動体のうち、他のジョブの実行に割り当てられていない前記移動体に優先的に割り当てる請求項1又は請求項2に記載の運用支援方法。
【請求項4】
前記電池情報に基づいて、電池残量が予め定めた閾値以下の前記移動体を前記ジョブの実行の割り当てから除外すると共に、充電を実行するように制御することを含む請求項1又は請求項2に記載の運用支援方法。
【請求項5】
前記ジョブ情報は、前記ジョブを実行可能な前記移動体に関する情報を含み、
前記ジョブ情報と、前記複数の移動体の各々の移動体に関する移動体情報とに基づいて、前記ジョブを実行可能な前記移動体の候補を選定し、
前記ジョブ情報及び前記電池情報に基づいて、前記候補の中から、前記ジョブを実行可能な電池残量を有する前記移動体に、前記ジョブの実行を割り当てることと、
を含む請求項1又は請求項2に記載の運用支援方法。
【請求項6】
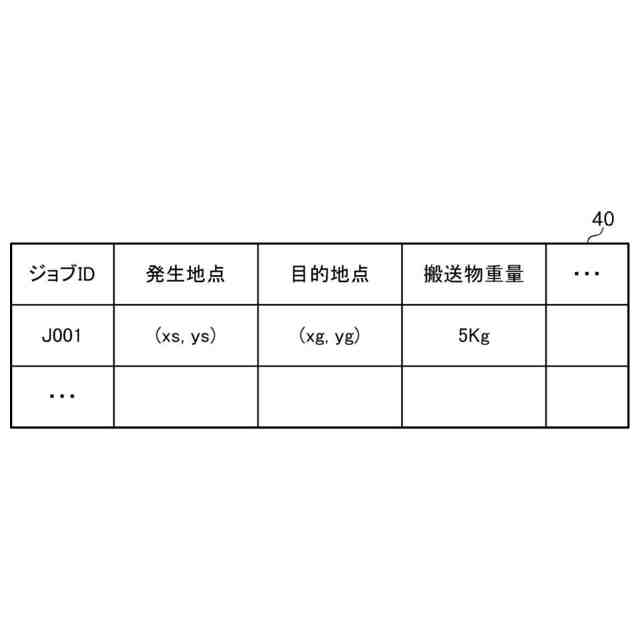
前記ジョブ情報は、発生地点から目的地点まで搬送物を搬送するジョブについての前記発生地点及び前記目的地点の位置情報と、前記搬送物の重量とを含み、
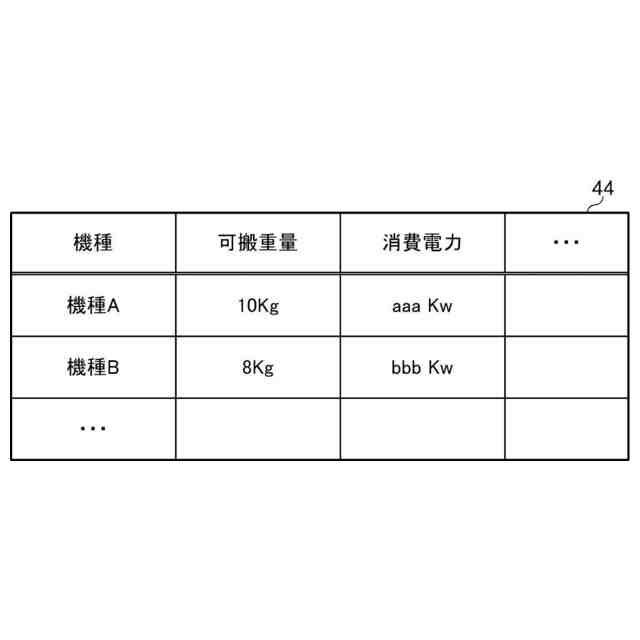
前記移動体の搬送可能な搬送物の重量及び搬送可能な領域を含む前記移動体情報を取得することと、
前記移動体情報及び前記ジョブ情報に基づいて、前記搬送物を前記発生地点から前記目的地点まで搬送可能な前記移動体の候補を選定することと、
前記ジョブ情報及び前記電池情報に基づいて、前記候補の中から、前記搬送物を前記発生地点から前記目的地点まで搬送可能な電池残量を有する前記移動体に、前記ジョブの実行を割り当てることと、
を含む請求項5に記載の運用支援方法。
【請求項7】
前記候補の中から、前記ジョブの実行後の電池残量が、前記目的地点から充電箇所までの移動に要する電力以上の移動体に、前記ジョブの実行を割り当てる請求項6に記載の運用支援方法。
【請求項8】
前記候補が複数存在する場合、前記ジョブの実行に要する電力が最小の前記移動体に、前記ジョブの実行を割り当てる請求項5に記載の運用支援方法。
【請求項9】
前記候補が複数存在する場合、前記移動体情報に基づいて、前記ジョブの完了が最も早い前記移動体に、前記ジョブの実行を割り当てる請求項5に記載の運用支援方法。
【請求項10】
電池で駆動する複数の移動体と、複数のジョブを実行させるように、前記複数の移動体へのジョブの割り当てを制御する運用支援装置とを含む運用支援システムであって、
前記運用支援装置は、
前記移動体の各々の電池の状態を示す電池情報を取得すると共に、実行を指示されたジョブに関するジョブ情報を取得する取得部と、
取得された前記ジョブ情報が示すジョブの実行を、取得された前記電池情報に基づいて、前記複数の移動体のいずれかに割り当てる割当部と、
前記複数の移動体のいずれかに、割り当てたジョブを実行させるように指示する指示部と、
を含む運用支援システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、運用支援方法、及び運用支援システムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、AMR(Autonomous Mobile Robot)、AGV(Automatic Guided Vehicle)等の移動体を制御することが行われている。
【0003】
例えば、複数の移動ロボットの充電作業を最適に制御するシステムが提案されている。このシステムは、複数の移動ロボットと、複数のロボットのバッテリの充電を行う充電器と、移動ロボットよりバッテリの充電残量を示す情報を取得し、充電残量に応じて予め設定された複数の優先度のうち適切な優先度を移動ロボット毎に設定し、充電状態に応じて充電が必要な移動ロボットを充電器まで自動走行させて充電作業を行わせる充電制御装置を備える。充電制御装置は、充電器によって充電できる最大数の移動ロボットが充電中であって、新たに充電が必要になった移動ロボットに設定された優先度が、充電中の移動ロボットの優先度よりも高い場合には、充電中の移動ロボットのうち最も低い優先度が設定された充電中の移動ロボットの充電を停止させ、新たに充電が必要となった移動ロボットに充電作業を行わせる(特許文献1)。
【0004】
また、例えば、複数の作業ロボットを同時に運用して作業を行わせる場合において、作業ロボットへの充電を効率的に行う作業ロボットシステムが提案されている。このシステムは、複数の作業ロボットと、充電ロボットとを備え、充電ロボットと作業ロボットの位置情報を取得し、作業ロボットの電池残量と可動時間と残作業時間を取得し、可動時間と残作業時間とに基づいて作業ロボットの充電の要否を判定して判定結果に基づいて今回の充電の対象である対象作業ロボットを決定し、該対象作業ロボットの位置まで移動して該対象作業ロボットに充電する充電指令を生成する。充電ロボットは、充電指令に基づいて対象作業ロボットへの充電を行う(特許文献2)。
【先行技術文献】
【特許文献】
【0005】
特許第5168210号公報
特許第6651159号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、電池残量だけで充電制御を行うと、ジョブの実行を指示したい移動体が充電中の場合等、生産計画に対して効率的なジョブの実行ができない場合が生じる。また、ジョブを効率的に実行しようとすると、移動体の台数を増やして、生産計画に対して余剰させておくことが必要となってしまう。
【0007】
本発明は、上記の点に鑑みてなされたものであり、電池で駆動する複数の移動体に効率的にジョブを実行させることを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明に係る運用支援方法は、運用支援装置が、複数のジョブを実行させるように、電池で駆動する複数の移動体へのジョブの割り当てを制御する運用支援方法であって、前記移動体の各々の電池の状態を示す電池情報を取得すること、実行を指示されたジョブに関するジョブ情報を取得することと、取得された前記ジョブ情報が示すジョブの実行を、取得された前記電池情報に基づいて、前記複数の移動体のいずれかに割り当てることと、前記複数の移動体のいずれかに、割り当てたジョブを実行させるように指示することと、を含む。
【0009】
また、本発明に係る運用支援システムは、電池で駆動する複数の移動体と、複数のジョブを実行させるように、前記複数の移動体へのジョブの割り当てを制御する運用支援装置とを含み、前記運用支援装置は、前記移動体の各々の電池の状態を示す電池情報を取得すると共に、実行を指示されたジョブに関するジョブ情報を取得する取得部と、取得された前記ジョブ情報が示すジョブの実行を、取得された前記電池情報に基づいて、前記複数の移動体のいずれかに割り当てる割当部と、前記複数の移動体のいずれかに、割り当てたジョブを実行させるように指示する指示部と、を含む。
【発明の効果】
【0010】
本発明に係る運用支援方法及びシステムによれば、電池で駆動する複数の移動体に効率的にジョブを実行させることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
端子台
13日前
オムロン株式会社
モータ
5日前
オムロン株式会社
ソケット
13日前
オムロン株式会社
電子機器
1か月前
オムロン株式会社
電子機器
1か月前
オムロン株式会社
検査装置
28日前
オムロン株式会社
電気機器
13日前
オムロン株式会社
電気機器
6日前
オムロン株式会社
センサ装置
1か月前
オムロン株式会社
電磁継電器
5日前
オムロン株式会社
電磁継電器
5日前
オムロン株式会社
電力変換装置
5日前
オムロン株式会社
粒子計測装置
1か月前
オムロン株式会社
電動把持工具
12日前
オムロン株式会社
電力変換装置
5日前
オムロン株式会社
粒子計測装置
1か月前
オムロン株式会社
非接触給電装置
5日前
オムロン株式会社
充放電システム
6日前
オムロン株式会社
非接触給電装置
5日前
オムロン株式会社
非接触給電装置
5日前
オムロン株式会社
トリガスイッチ
12日前
オムロン株式会社
生体情報処理方法
1か月前
オムロン株式会社
リミットスイッチ
1日前
オムロン株式会社
自律作業システム
27日前
オムロン株式会社
電子機器システム
1日前
オムロン株式会社
生体情報処理システム
1か月前
オムロン株式会社
経路情報提供システム
22日前
オムロン株式会社
検出装置および操作装置
26日前
オムロン株式会社
測定システム及び測定方法
1日前
オムロン株式会社
運用支援方法及びシステム
1日前
オムロン株式会社
検査装置及び対象物検知方法
1日前
オムロン株式会社
X線検査装置及びX線検査方法
12日前
オムロン株式会社
装置、温調システムおよび方法
1か月前
オムロン株式会社
出力電圧保持装置および電源装置
1日前
オムロン株式会社
外観検査装置、及び外観検査方法
6日前
オムロン株式会社
方法、プログラム、および、装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ