TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024128833
公報種別
公開特許公報(A)
公開日
2024-09-24
出願番号
2023038079
出願日
2023-03-10
発明の名称
判定装置、制御方法および荷物搬送装置
出願人
オムロン株式会社
代理人
個人
主分類
B66F
9/24 20060101AFI20240913BHJP(巻上装置;揚重装置;牽引装置)
要約
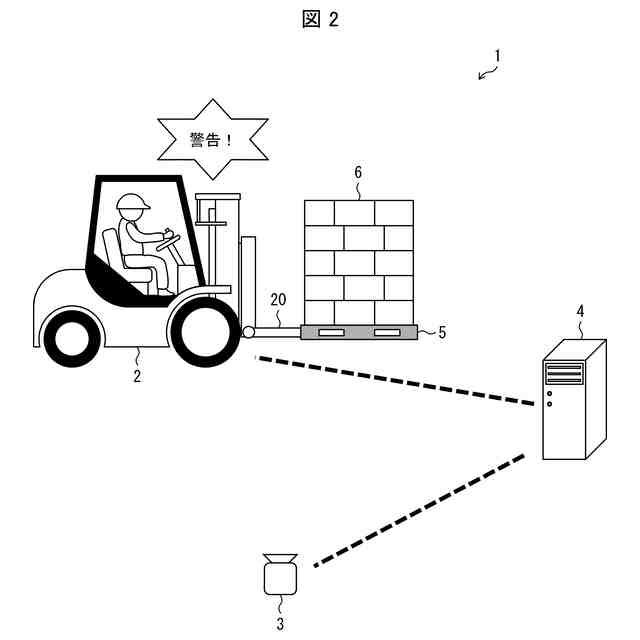
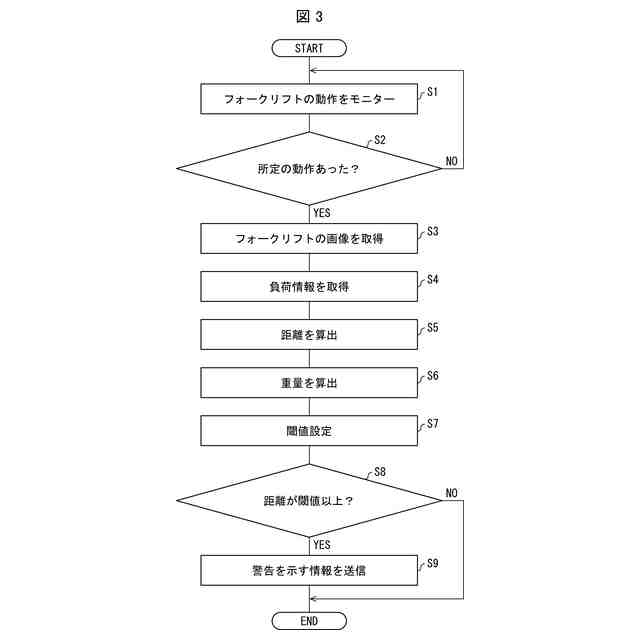
【課題】荷物搬送装置の転倒の危険を警告する。
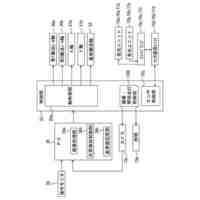
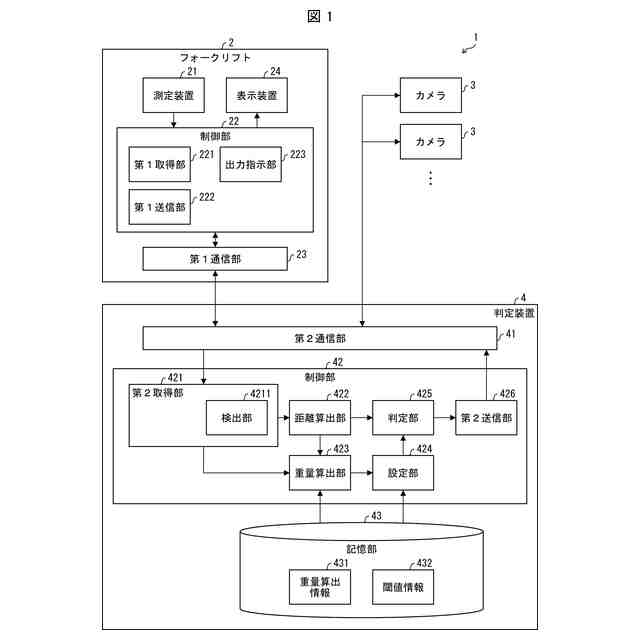
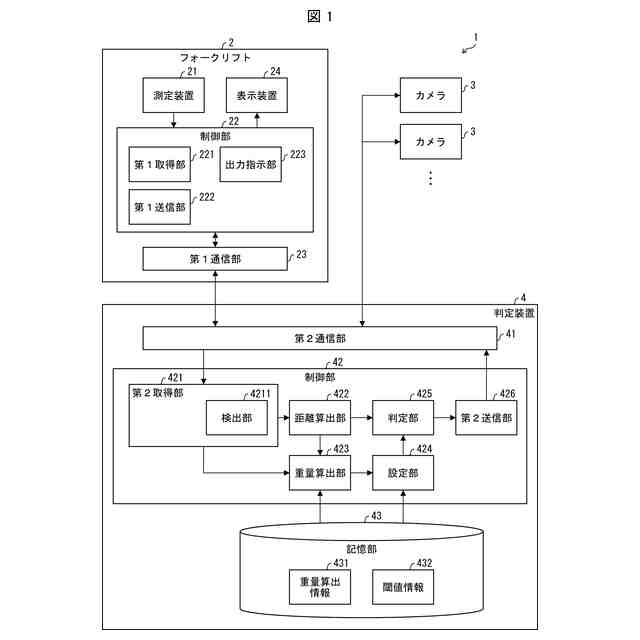
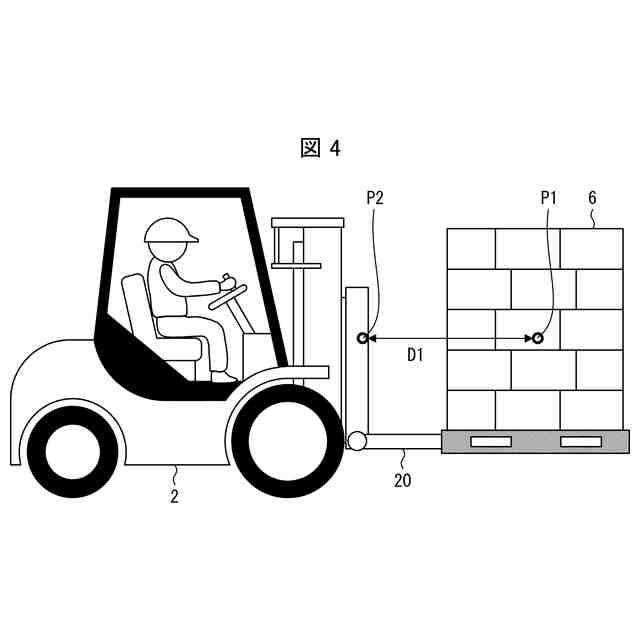
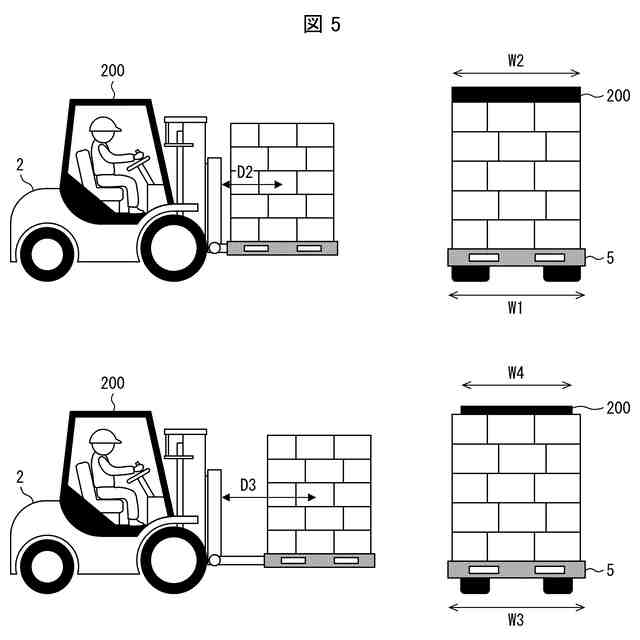
【解決手段】判定装置(4)は、フォークリフト(2)が荷物を持ち上げる際の撮影画像から、フォークリフト(2)の所定の位置からの荷物の距離を算出し、当該距離およびフォークリフト(2)が荷物を持ち上げる際の負荷情報を用いて、フォークリフト(2)の転倒の危険を判定する。判定装置(4)は判定結果に基づいて警告を示す情報を送信する。
【選択図】図1
特許請求の範囲
【請求項1】
荷物搬送装置が荷物を持ち上げる際の負荷に関する負荷情報および前記荷物搬送装置の撮影画像を取得する取得部と、
前記撮影画像を用いて、前記荷物搬送装置の所定の位置からの前記荷物の距離を算出する距離算出部と、
算出された前記荷物の距離および前記負荷情報を用いて、前記荷物搬送装置が転倒する危険があるか否かを判定する判定部と、
前記荷物搬送装置が転倒する危険があると判定した場合に、警告を示す情報を送信する送信部と、
を備える判定装置。
続きを表示(約 720 文字)
【請求項2】
前記負荷情報は、前記荷物を持ち上げるための前記荷物搬送装置の駆動に関する電力を含む請求項1に記載の判定装置。
【請求項3】
取得した前記撮影画像から前記荷物搬送装置の所定の動作を検出する検出部をさらに、備え、
前記取得部は、検出された前記所定の動作に基づいて、荷物搬送装置が荷物を持ち上げる際の前記荷物搬送装置の撮影画像を取得する請求項1に記載の判定装置。
【請求項4】
前記荷物搬送装置から送信される、前記荷物搬送装置の駆動に関する所定の信号を検出する検出部をさらに、備え、
前記取得部は、検出された前記所定の信号に基づいて、荷物搬送装置が荷物を持ち上げる際の前記荷物搬送装置の撮影画像を取得する請求項1に記載の判定装置。
【請求項5】
コンピュータが実行する制御方法であって、
荷物搬送装置が荷物を持ち上げる際の負荷に関する負荷情報および前記荷物搬送装置の撮影画像を取得することと、
前記撮影画像を用いて、前記荷物搬送装置の所定の位置からの前記荷物の距離を算出することと、
算出された前記荷物の距離および前記負荷情報を用いて、前記荷物搬送装置が転倒する危険があるか否かを判定することと、
前記荷物搬送装置が転倒する危険があると判定した場合に、警告を示す情報を送信することと、
を含む制御方法。
【請求項6】
自装置が荷物を持ち上げる際の負荷に関する負荷情報を取得する取得部と、
取得された前記負荷を示す負荷情報を請求項1に記載の判定装置に送信する送信部と、
を備える荷物搬送装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は荷物搬送装置の状態を判定する判定装置等に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
倉庫などにおいては荷物の運搬にフォークリフトなどの荷物搬送装置が用いられる。荷物搬送装置に関わる技術として、例えば、特許文献1には、昇降される荷物の重さを検出し、荷重の大きさに伴う種々の特性変化に対して適切な運転制御を行うことを目的とする荷物昇降装置が開示されている。詳細には、当該荷物昇降装置は荷物の昇降速度を検出して、検出された荷物の昇降速度および荷物の重さとその荷重下での昇降速度との関係を示すデータに基づいて荷物の重さを判断する。そして、当該荷物昇降装置は判断した荷物の重さに応じた運転制御を行う。
【先行技術文献】
【特許文献】
【0003】
特開平2002-20093号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述のような従来技術は、当該荷物昇降装置における荷物を支える位置を考慮した技術でない。そのため、当該荷物昇降装置による荷物の重さの判断の精度は低くなる。また、当該荷物昇降装置は、荷物を昇降することによって当該荷物昇降装置が転倒することを察知するための技術ではない。
【0005】
本開示の一態様は、荷物搬送装置が荷物を持ち上げることによって転倒する可能性を判定し、転倒の危険を警告する判定装置等を実現することを目的とする。
【課題を解決するための手段】
【0006】
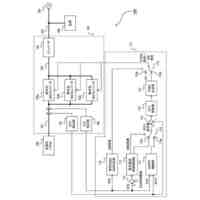
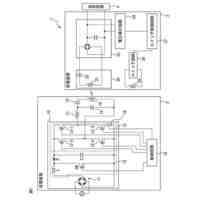
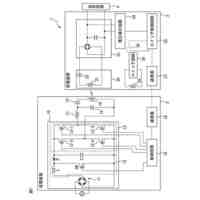
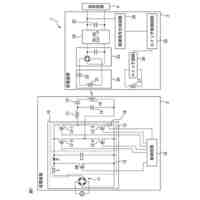
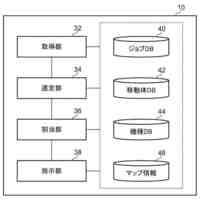
前記の課題を解決するために、本開示の一態様に係る判定装置は、荷物搬送装置が荷物を持ち上げる際の負荷に関する負荷情報および前記荷物搬送装置の撮影画像を取得する取得部と、前記撮影画像を用いて、前記荷物搬送装置の所定の位置からの前記荷物の距離を算出する距離算出部と、算出された前記荷物の距離および前記負荷情報を用いて、前記荷物搬送装置が転倒する危険があるか否かを判定する判定部と、前記荷物搬送装置が転倒する危険があると判定した場合に、警告を示す情報を送信する送信部と、を備える。
【0007】
また、本開示の一態様に係る制御方法は、コンピュータが実行する制御方法であって、荷物搬送装置が荷物を持ち上げる際の負荷に関する負荷情報および前記荷物搬送装置の撮影画像を取得することと、前記撮影画像を用いて、前記荷物搬送装置の所定の位置からの前記荷物の距離を算出することと、算出された前記荷物の距離および前記負荷情報を用いて、前記荷物搬送装置が転倒する危険があるか否かを判定することと、前記荷物搬送装置が転倒する危険があると判定した場合に、警告を示す情報を送信することと、を含む。
【0008】
例えば、荷物搬送装置の所定の位置と持ち上げる荷物との距離が離れている場合に、荷物搬送装置が転倒する可能性は高くなる。前記の構成によれば、算出した荷物搬送装置の所定の位置からの荷物の距離および荷物を持ち上げる際の負荷を用いて、荷物搬送装置が転倒する危険を判定し、危険がある場合に警告を示す情報を送信することができる。そのため、当該警告に気を付けていれば、荷物搬送装置を操作する作業者は荷物搬送装置と荷物との位置関係を常に意識して作業を行う必要がなくなる。よって、荷物搬送装置を操作する作業者の作業効率の低下を低減することができるという効果を奏する。
【0009】
本開示の一態様に係る判定装置は、前記負荷情報は、前記荷物を持ち上げるための前記荷物搬送装置の駆動に関する電力を含んでもよい。
【0010】
前記の構成によれば、荷物を持ち上げるための荷物搬送装置の駆動に関する電力を用いて、前記荷物搬送装置が転倒する危険があるか否かを判定することができるという効果を奏する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
端子台
13日前
オムロン株式会社
モータ
5日前
オムロン株式会社
電気機器
13日前
オムロン株式会社
検査装置
28日前
オムロン株式会社
ソケット
13日前
オムロン株式会社
電気機器
6日前
オムロン株式会社
電磁継電器
5日前
オムロン株式会社
電磁継電器
5日前
オムロン株式会社
電力変換装置
5日前
オムロン株式会社
電力変換装置
5日前
オムロン株式会社
電動把持工具
12日前
オムロン株式会社
トリガスイッチ
12日前
オムロン株式会社
非接触給電装置
5日前
オムロン株式会社
充放電システム
6日前
オムロン株式会社
非接触給電装置
5日前
オムロン株式会社
非接触給電装置
5日前
オムロン株式会社
電子機器システム
1日前
オムロン株式会社
自律作業システム
27日前
オムロン株式会社
リミットスイッチ
1日前
オムロン株式会社
経路情報提供システム
22日前
オムロン株式会社
検出装置および操作装置
26日前
オムロン株式会社
運用支援方法及びシステム
1日前
オムロン株式会社
測定システム及び測定方法
1日前
オムロン株式会社
検査装置及び対象物検知方法
1日前
オムロン株式会社
X線検査装置及びX線検査方法
12日前
オムロン株式会社
外観検査装置、及び外観検査方法
5日前
オムロン株式会社
外観検査装置、及び外観検査方法
5日前
オムロン株式会社
外観検査装置、及び外観検査方法
6日前
オムロン株式会社
出力電圧保持装置および電源装置
1日前
オムロン株式会社
処理装置、処理方法及びプログラム
1日前
オムロン株式会社
制御装置、制御方法及びプログラム
27日前
オムロン株式会社
半導体モジュール及びサーボドライバ
29日前
オムロン株式会社
情報処理装置、方法およびプログラム
23日前
オムロン株式会社
情報処理装置、方法およびプログラム
23日前
オムロン株式会社
判定装置、制御方法および荷物搬送装置
1日前
オムロン株式会社
情報処理装置および情報処理プログラム
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ