TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024078816
公報種別
公開特許公報(A)
公開日
2024-06-11
出願番号
2022191382
出願日
2022-11-30
発明の名称
電子制御装置
出願人
株式会社アドヴィックス
代理人
個人
,
個人
主分類
G01P
3/56 20060101AFI20240604BHJP(測定;試験)
要約
【課題】ノイズ成分を除去しつつもフィルタ処理の実施に伴う位相遅れの少ない状態量検出値を算出できるようにすること。
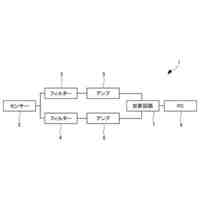
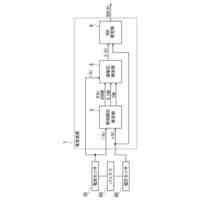
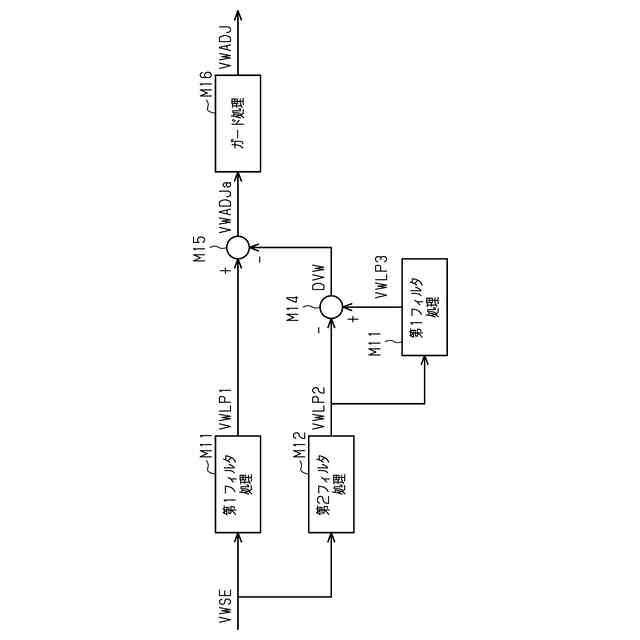
【解決手段】ECU40は、車輪速センサ51の検出信号を数値化した車輪速生値に対して第1フィルタ処理を施すことによって、第1車輪速処理値を導出する第1フィルタ処理部101と、車輪速生値に対して第2フィルタ処理を施すことによって、第2車輪速処理値を導出する第2フィルタ処理部102と、第2車輪速処理値に対して第1フィルタ処理を施すことによって、第3車輪速処理値を導出する第3フィルタ処理部103と、第3車輪速処理値と第2車輪速処理値との差分と第1車輪速処理値とに基づいて、車輪速検出値を算出する状態量算出部104とを備えている。
【選択図】図1
特許請求の範囲
【請求項1】
原動機の動力で移動する輸送機器の状態量を検出するセンサを備える前記輸送機器に搭載される電子制御装置であって、
前記センサの検出信号を数値化した生値に対して、ローパスフィルタを用いる第1フィルタ処理を施すことによって、第1状態量処理値を導出する第1フィルタ処理部と、
前記生値に対して前記第1フィルタ処理を施した場合と同等以上の前記生値からのノイズの除去効率を有する第2フィルタ処理を前記生値に対して施すことによって、第2状態量処理値を導出する第2フィルタ処理部と、
前記第2状態量処理値に対して前記第1フィルタ処理を施すことによって、第3状態量処理値を導出する第3フィルタ処理部と、
前記第3状態量処理値と前記第2状態量処理値との差分と前記第1状態量処理値とに基づいて、前記状態量の検出値である状態量検出値を算出する状態量算出部と、を備える
電子制御装置。
続きを表示(約 370 文字)
【請求項2】
前記第2フィルタ処理は、前記生値に対して前記第1フィルタ処理を施した場合よりも前記生値からのノイズの除去効率の高い処理である
請求項1に記載の電子制御装置。
【請求項3】
前記第2フィルタ処理は、ローパスフィルタを用いるフィルタ処理である
請求項1に記載の電子制御装置。
【請求項4】
前記第2フィルタ処理のローパスフィルタのカットオフ周波数は、前記第1フィルタ処理のローパスフィルタのカットオフ周波数よりも低い
請求項3に記載の電子制御装置。
【請求項5】
前記センサは、速度を検出するセンサであり、
前記状態量算出部は、前記状態量検出値として速度の検出値を算出する
請求項1から請求項4のうち何れか一項に記載の電子制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、原動機の動力で移動する輸送機器に搭載される電子制御装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1は、車輪速センサの検出値を基に、車輪のスリップ度合いを推定する制御装置を開示している。当該制御装置は、車輪速センサの出力値に基づいた車輪速に対して第1フィルタ処理を施すことによって算出した第1車輪速フィルタ値と、当該車輪速に対して第2フィルタ処理を施すことによって算出した第2車輪速フィルタ値との差分を取得する。第1フィルタ処理及び第2フィルタ処理は何れもローパスフィルタを用いたフィルタ処理である。第1フィルタ処理と第2フィルタ処理とではローパスフィルタのカットオフ周波数が異なる。そのため、車輪速が減速している場合には、車輪のスリップ率が高いほど上記差分が大きくなる。したがって、制御装置は上記差分に基づいて車輪のスリップ度合いを推定できる。
【先行技術文献】
【特許文献】
【0003】
特開2016-182884号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車輪速センサなどのように車両の状態量を検出するセンサの検出信号を数値化した生値には、ノイズ成分が重畳している。そのため、一般的には、生値に対してフィルタ処理を施すことによって状態量検出値が導出される。しかしながら、フィルタ処理を生値に施した場合、当該フィルタ処理による位相遅れが生じるため、制御装置が導出した状態量検出値と状態量の実値との間に乖離が生じるおそれがある。なお、こうした課題は、車両以外の他の輸送機器の状態量を検出する場合でも生じうる。
【課題を解決するための手段】
【0005】
上記課題を解決するための電子制御装置は、原動機の動力で移動する輸送機器の状態量を検出するセンサを備える前記輸送機器に搭載される装置である。当該電子制御装置は、前記センサの検出信号を数値化した生値に対して、ローパスフィルタを用いる第1フィルタ処理を施すことによって、第1状態量処理値を導出する第1フィルタ処理部と、前記生値に対して前記第1フィルタ処理を施した場合と同等以上の前記生値からのノイズの除去効率を有する第2フィルタ処理を前記生値に対して施すことによって、第2状態量処理値を導出する第2フィルタ処理部と、前記第2状態量処理値に対して前記第1フィルタ処理を施すことによって、第3状態量処理値を導出する第3フィルタ処理部と、前記第3状態量処理値と前記第2状態量処理値との差分と前記第1状態量処理値とに基づいて、前記状態量の検出値である状態量検出値を算出する状態量算出部と、を備えている。なお、原動機の動力で移動する輸送機器としては、例えば、車両、航空機及び船舶を挙げることができる。
【0006】
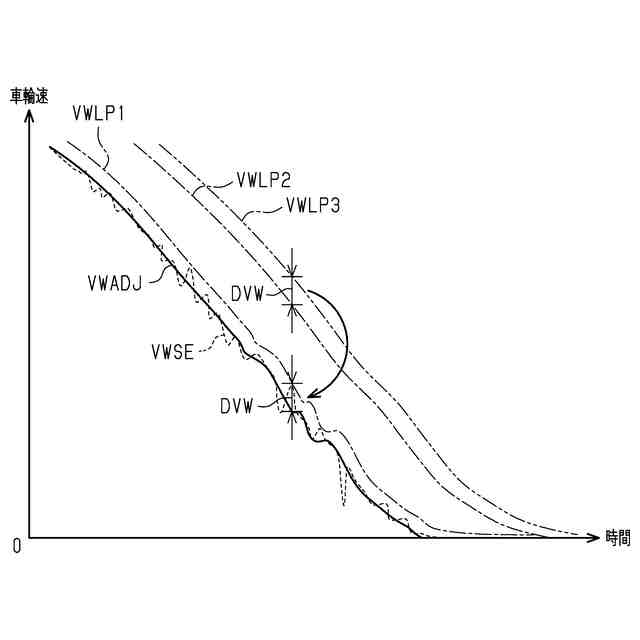
上記電子制御装置は、生値に対して第2フィルタ処理を施すことによって第2状態量処理値を導出する。また、電子制御装置は、第2状態量処理値に対して第1フィルタ処理を施すことによって、第3状態量処理値を導出する。第3状態量処理値と第2状態量処理値との差分は、生値に対して第1フィルタ処理を施した場合の位相遅れに対応する。そこで、上記電子制御装置は、当該差分と第1状態量処理値とに基づいて、状態量検出値を算出する。これにより、上記電子制御装置は、ノイズ成分を除去しつつもフィルタ処理の実施に伴う位相遅れの少ない状態量検出値を算出できる。
【図面の簡単な説明】
【0007】
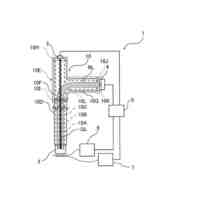
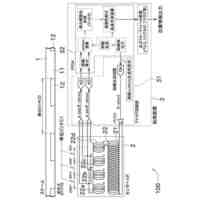
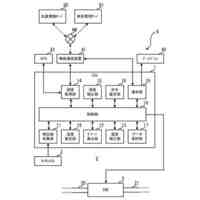
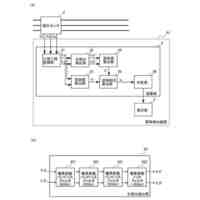
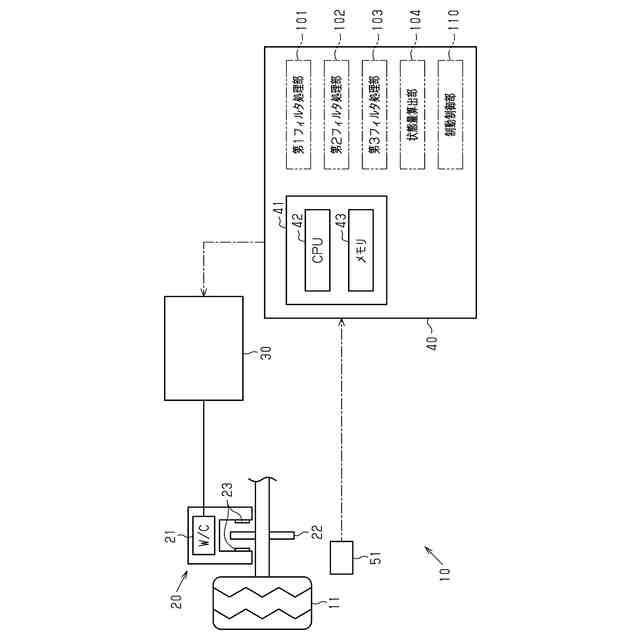
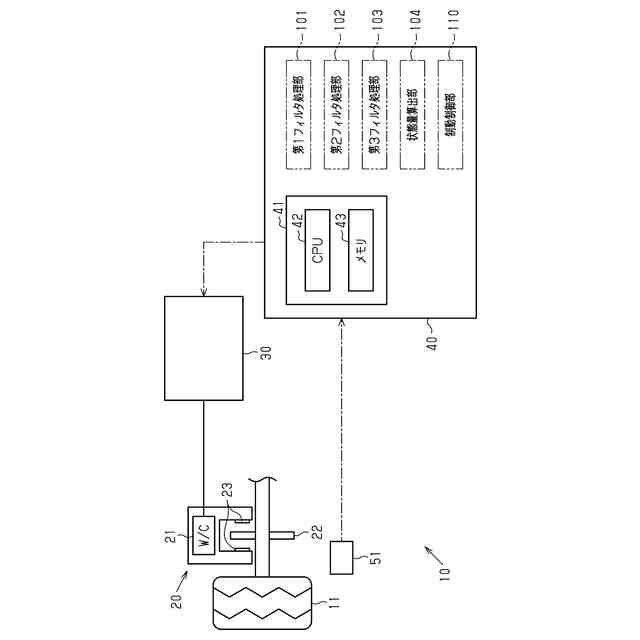
図1は、実施形態の電子制御装置と、制動アクチュエータと、摩擦ブレーキと、車輪とを示す概略構成図である。
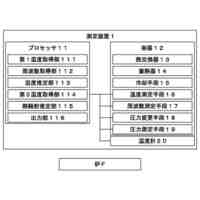
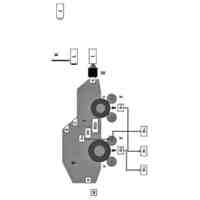
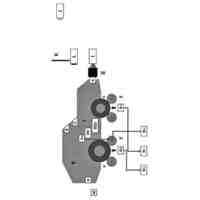
図2は、図1の電子制御装置で実行される各種の処理の流れを説明するブロック図である。
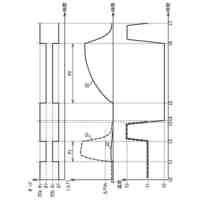
図3は、車輪速の推移を示すタイムチャートである。
【発明を実施するための形態】
【0008】
以下、原動機の動力で移動する輸送機器に搭載される電子制御装置の一実施形態を図1から図3に従って説明する。本実施形態では、上記輸送機器は車両である。車両は、エンジン及び電気モータのうちの少なくとも一方を原動機として備えている。以降では、電子制御装置を「ECU」と記載する。
【0009】
図1は、車輪11と、摩擦ブレーキ20と、制動アクチュエータ30と、ECU40とを備える車両10を示す模式図である。車両10は、回生制動力を発生させることのできる電動車両である。
【0010】
<摩擦ブレーキと制動アクチュエータ>
摩擦ブレーキ20は、ホイールシリンダ21と、回転体22と、摩擦部材23とを備えている。回転体22は車輪11と一体に回転する。摩擦部材23を回転体22に押し付けることにより、車輪11に制動力が発生する。摩擦ブレーキ20は、ホイールシリンダ21の液圧が高いほど摩擦部材23を回転体22に押し付ける力が大きくなるように構成されている。以降では、摩擦ブレーキ20の作動によって車輪11に発生する制動力を「摩擦制動力」ともいう。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オンキヨー株式会社
システム
11日前
個人
歩行者音声ガイドシステム
22日前
横河電機株式会社
光学プローブ
11日前
株式会社ヨコオ
検査治具
23日前
株式会社豊田自動織機
無人走行体
26日前
太陽誘電株式会社
検出装置
18日前
昭電工業株式会社
測定装置
24日前
大和製衡株式会社
重量選別機
16日前
トヨタ自動車株式会社
測定治具
26日前
矢崎総業株式会社
センサ
18日前
キーコム株式会社
試験システム
29日前
株式会社ニシヤマ
物品取付装置
19日前
株式会社東芝
センサ
3日前
キーコム株式会社
試験システム
29日前
村田機械株式会社
変位検出装置
26日前
株式会社ニシヤマ
物品取付装置
19日前
TDK株式会社
磁気センサ
23日前
大同特殊鋼株式会社
形状検出装置
18日前
個人
氷河融雪水流出量の推定方法
10日前
株式会社島津製作所
分析装置
18日前
三晶エムイーシー株式会社
試料容器
4日前
三菱マテリアル株式会社
温度センサ
19日前
トヨタ自動車株式会社
劣化推定装置
19日前
オムロン株式会社
スイッチング装置
29日前
株式会社不二越
X線測定装置
26日前
株式会社ミツトヨ
光学式エンコーダ
24日前
三菱マテリアル株式会社
温度センサ
11日前
株式会社ダイヘン
異常検出装置
16日前
マレリ株式会社
推定装置
2日前
トヨタ自動車株式会社
空燃比算出装置
26日前
日本メクトロン株式会社
部品実装基板
29日前
東海電子株式会社
アルコール測定装置
11日前
トヨタ自動車株式会社
電気機器
22日前
株式会社フジキン
濃度測定装置
23日前
ミイシステム株式会社
非接触信号状態判定装置
22日前
株式会社不二越
X線回折測定装置
26日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ