TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024077366
公報種別
公開特許公報(A)
公開日
2024-06-07
出願番号
2022189424
出願日
2022-11-28
発明の名称
縫製システム
出願人
JUKI株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
D05B
19/00 20060101AFI20240531BHJP(縫製;刺しゅう;タフティング)
要約
【課題】縫製品を製造する工程を自動化すること。
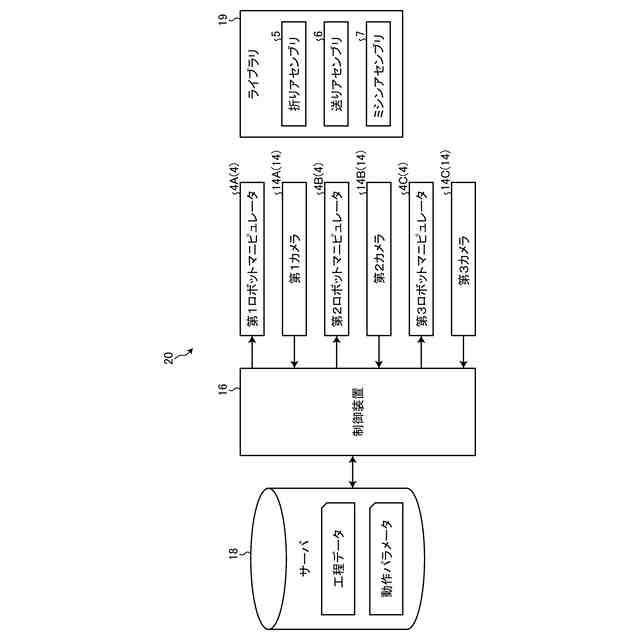
【解決手段】縫製システムは、ロボットマニピュレータと、ロボットマニピュレータに着脱され、生地について所定の作業をそれぞれ実施可能な複数のアセンブリと、生地から縫製品を製造するための複数の工程と複数の工程のそれぞれにおいて使用するアセンブリとの関係を示す工程データを記憶するサーバと、工程データに基づいて、ロボットマニピュレータに装着されるアセンブリを選択する制御装置と、を備える。
【選択図】図6
特許請求の範囲
【請求項1】
ロボットマニピュレータと、
前記ロボットマニピュレータに着脱され、生地について所定の作業をそれぞれ実施可能な複数のアセンブリと、
前記生地から縫製品を製造するための複数の工程と複数の前記工程のそれぞれにおいて使用する前記アセンブリとの関係を示す工程データを記憶するサーバと、
前記工程データに基づいて、前記ロボットマニピュレータに装着されるアセンブリを選択する制御装置と、を備える、
縫製システム。
続きを表示(約 840 文字)
【請求項2】
前記制御装置は、前記ロボットマニピュレータを制御する、
請求項1に記載の縫製システム。
【請求項3】
前記制御装置は、前記ロボットマニピュレータに装着された前記アセンブリを制御する、
請求項2に記載の縫製システム。
【請求項4】
前記ロボットマニピュレータは、複数設けられる、
請求項1に記載の縫製システム。
【請求項5】
前記サーバは、前記工程ごとの前記ロボットマニピュレータの動作パラメータを記憶し、
前記制御装置は、前記動作パラメータに基づいて、前記ロボットマニピュレータを制御する、
請求項2に記載の縫製システム。
【請求項6】
前記アセンブリは、生地に折り目を付ける折り作業を実施する折りアセンブリ、生地に縫い目を付けるときに生地を送る送り作業を実施する送りアセンブリ、及び生地に縫い目を付ける縫い作業を実施するミシンアセンブリを含む、
請求項3に記載の縫製システム。
【請求項7】
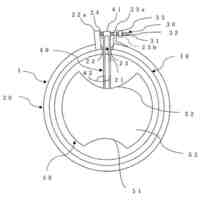
前記ミシンアセンブリは、釜と協働して縫い作業を実施し、
前記制御装置は、前記釜を制御する、
請求項6に記載の縫製システム。
【請求項8】
前記生地に設けられたマークを撮影するカメラを備え、
前記制御装置は、前記カメラにより取得された前記マークの画像データに基づいて、前記アセンブリの作業内容を決定し、前記作業内容に基づいて、前記アセンブリを制御する、
請求項3に記載の縫製システム。
【請求項9】
前記制御装置は、前記マークの画像データに基づいて、前記生地を位置決めする、
請求項8に記載の縫製システム。
【請求項10】
前記マークは、可視光を反射しない材料により形成される、
請求項8に記載の縫製システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、縫製システムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
縫製システムに係る技術分野において、特許文献1に開示されているような、ロボットアームに支持されるミシンが知られている。
【先行技術文献】
【特許文献】
【0003】
特開2019-201742号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
衣類等の縫製品は、複数の工程を経て製造される。従来、一部の工程においてはミシン等の専用装置が使用されるものの、大半の工程を人手が担っている。縫製品を効率良く製造するために、縫製品を製造する工程の自動化が要望される。
【課題を解決するための手段】
【0005】
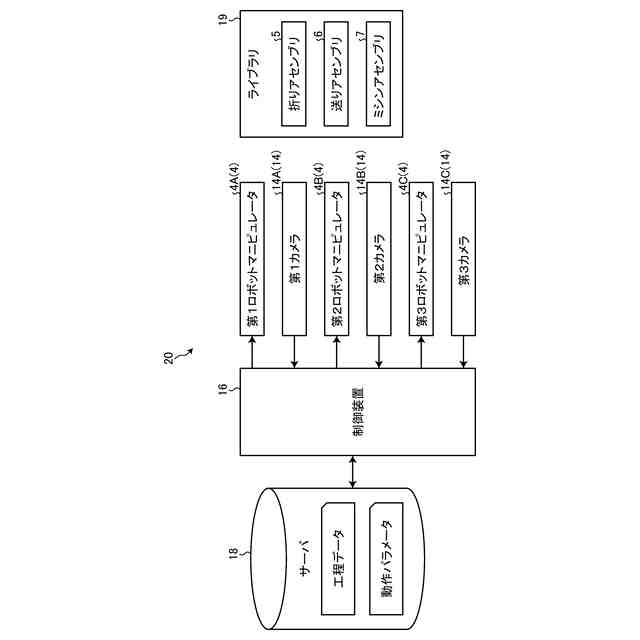
本明細書は、縫製システムを開示する。縫製システムは、ロボットマニピュレータと、ロボットマニピュレータに着脱され、生地について所定の作業をそれぞれ実施可能な複数のアセンブリと、生地から縫製品を製造するための複数の工程と複数の工程のそれぞれにおいて使用するアセンブリとの関係を示す工程データを記憶するサーバと、工程データに基づいて、ロボットマニピュレータに装着されるアセンブリを選択する制御装置と、を備える。
【発明の効果】
【0006】
本明細書で開示する技術によれば、縫製品を製造する工程が自動化される。
【図面の簡単な説明】
【0007】
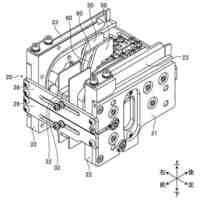
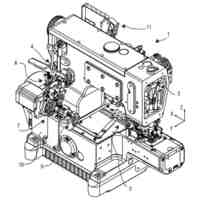
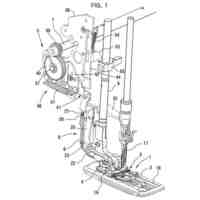
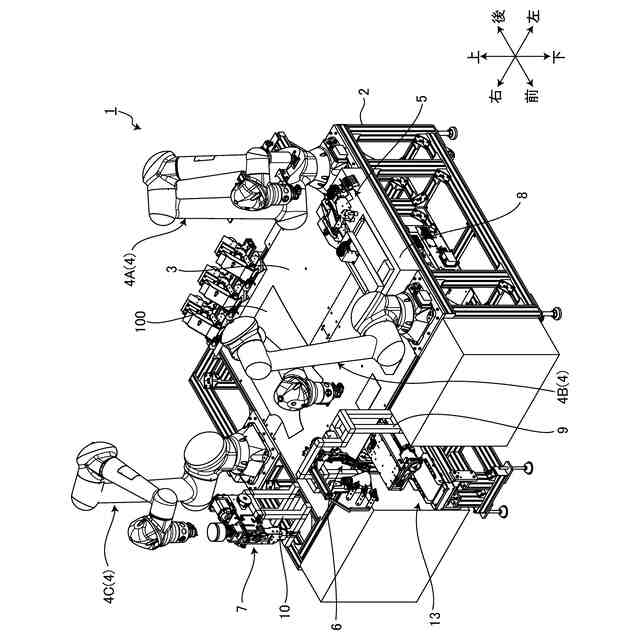
図1は、実施形態に係る縫製装置を示す斜視図である。
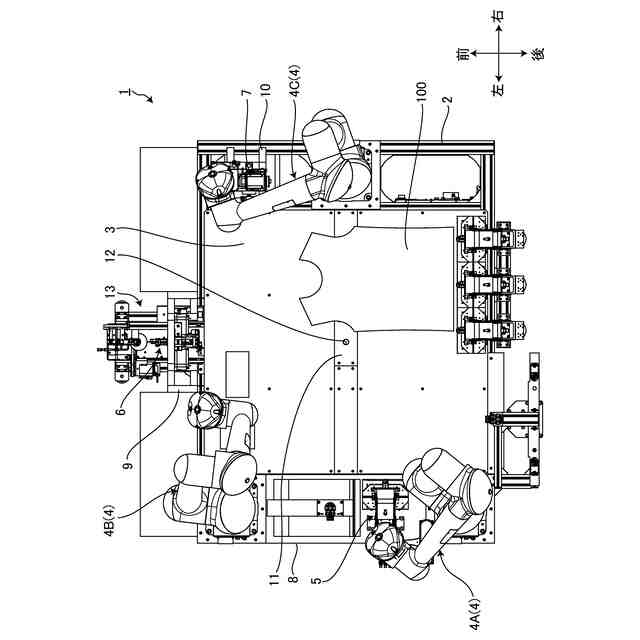
図2は、実施形態に係る縫製装置を示す平面図である。
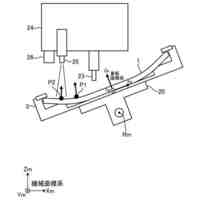
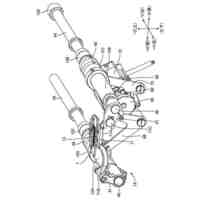
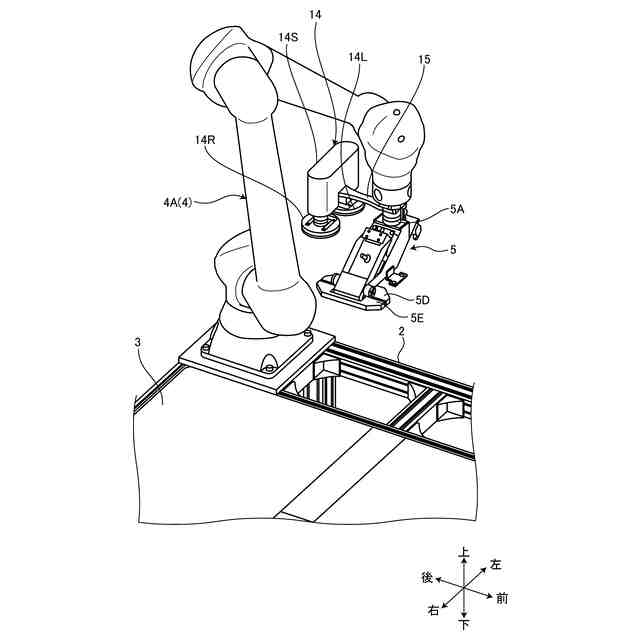
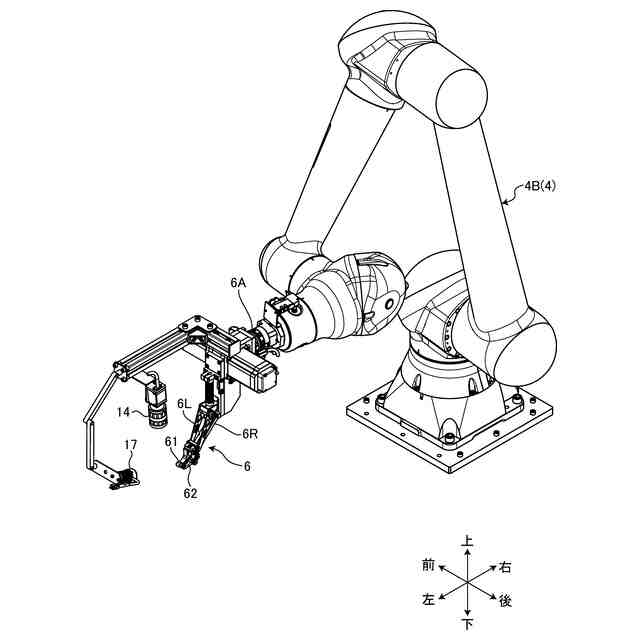
図3は、実施形態に係る第1ロボットマニピュレータの先端部に装着された折りアセンブリを示す斜視図である。
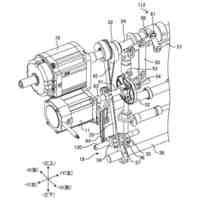
図4は、実施形態に係る第2ロボットマニピュレータの先端部に装着された送りアセンブリを示す斜視図である。
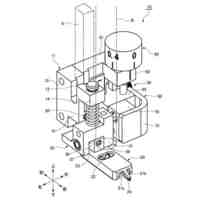
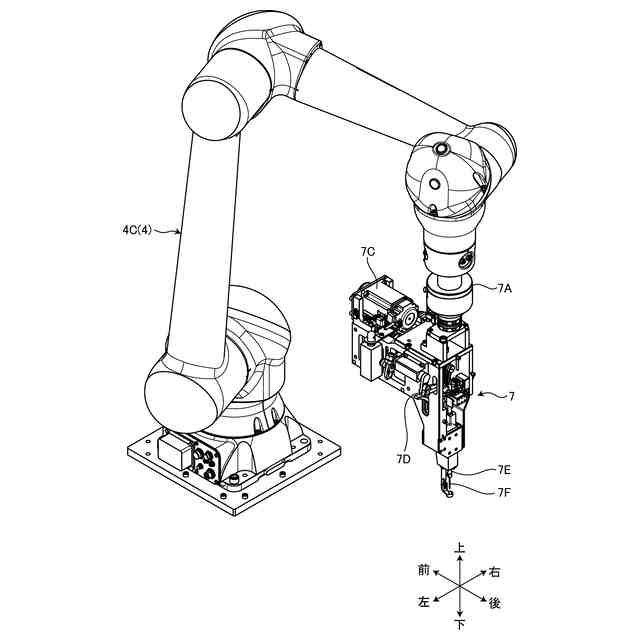
図5は、実施形態に係る第3ロボットマニピュレータの先端部に装着されたミシンアセンブリを示す斜視図である。
図6は、実施形態に係る縫製システムを示すブロック図である。
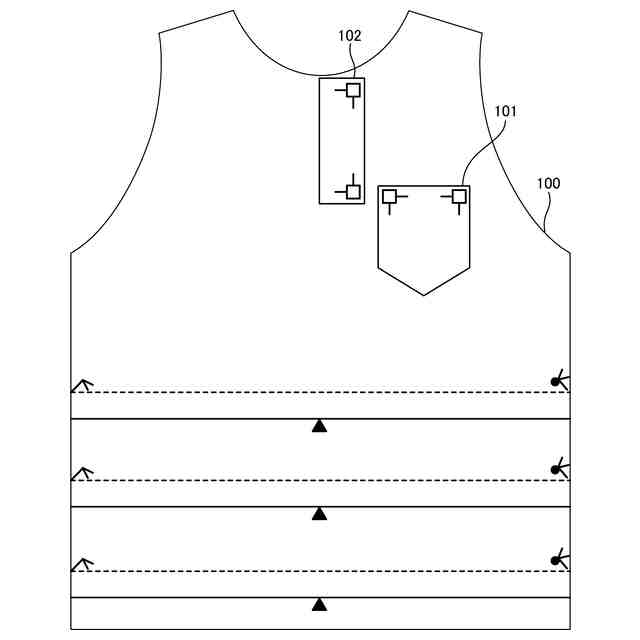
図7は、実施形態に係るマークが設けられた生地を示す図である。
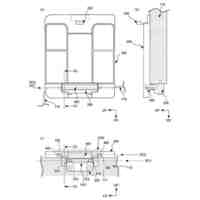
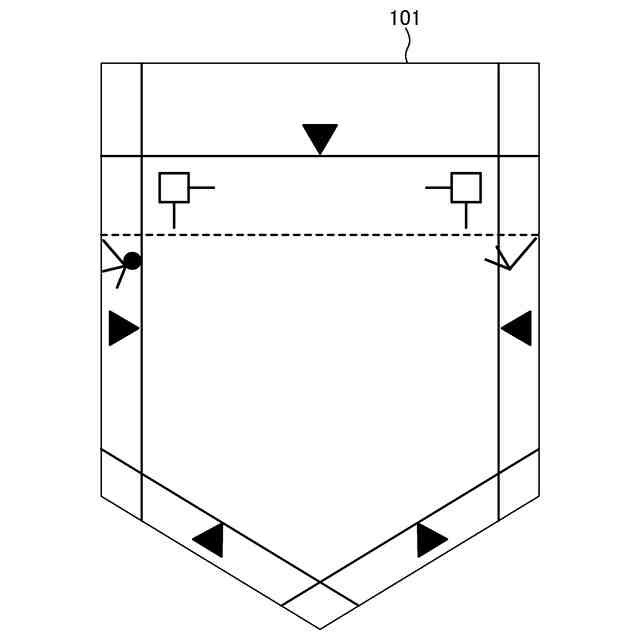
図8は、実施形態に係る前身頃に縫い付けられる前のポケットを示す図である。
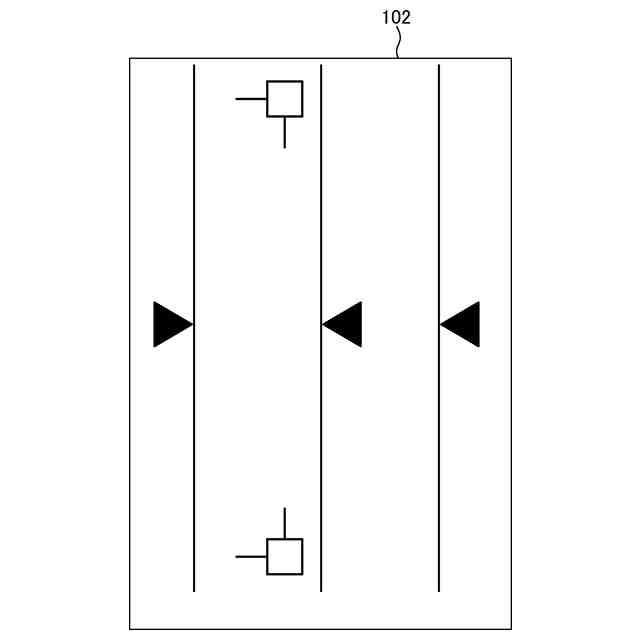
図9は、実施形態に係る前身頃に縫い付けられる前の前立てを示す図である。
図10は、実施形態に係るマークとマークが表す意味とを示す図である。
【発明を実施するための形態】
【0008】
以下、実施形態について図面を参照しながら説明する。実施形態においては、左、右、前、後、上、及び下の用語を用いて各部の位置関係について説明する。これらの用語は、縫製装置1の中心を基準とした相対位置又は方向を示す。
【0009】
[縫製装置]
図1は、実施形態に係る縫製装置1を示す斜視図である。図2は、実施形態に係る縫製装置1を示す平面図である。図1及び図2に示すように、縫製装置1は、架台2と、天板3と、ロボットマニピュレータ4と、複数のアセンブリ(5,6,7)とを備える。
【0010】
架台2は、天板3及びロボットマニピュレータ4のそれぞれを支持する。天板3は、生地を支持する上面を有する。図1及び図2には、生地の一例として、布製の前身頃100が記載されている。ロボットマニピュレータ4の基端部は、天板3の周囲の架台2に固定される。複数のアセンブリ(5,6,7)のそれぞれは、ロボットマニピュレータ4の先端部に着脱される。複数のアセンブリ(5,6,7)のそれぞれは、ロボットマニピュレータ4の先端部に装着された状態で、生地について所定の作業を実施可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン釜の給油装置
1か月前
JUKI株式会社
マウントデータ作成方法
1か月前
JUKI株式会社
フィーダ及び部品実装装置
10日前
JUKI株式会社
部品実装装置及び部品実装方法
8日前
JUKI株式会社
ミシン管理システム及びミシン管理方法
2か月前
JUKI株式会社
実装装置、実装方法、及び電子デバイスの製造方法
8日前
JUKI株式会社
実装装置、実装方法、及び電子デバイスの製造方法
8日前
JUKI株式会社
実装装置、実装方法、及び電子デバイスの製造方法
8日前
JUKI株式会社
実装装置、実装方法、及び電子デバイスの製造方法
8日前
JUKI株式会社
情報端末、ミシン管理システム、及びミシン管理方法
2か月前
JUKI株式会社
ミシン管理システム、ミシン管理方法、及び情報端末
2か月前
JUKI株式会社
パレット、生産システム、及び電子デバイスの製造方法
8日前
個人
刺繍枠及び刺繍枠取付部材
2か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
ブラザー工業株式会社
ミシン
1か月前
ブラザー工業株式会社
ミシン
1か月前
ブラザー工業株式会社
縫製装置
3か月前
ブラザー工業株式会社
縫製装置
1か月前
株式会社ジャノメ
ミシン用補助テーブル
2日前
JUKI株式会社
ミシン釜の給油装置
1か月前
株式会社PEGASUS
サージングミシンの生地ガイド
4か月前
株式会社PEGASUS
偏平縫いミシンの下糸切り装置
1か月前
JUKI株式会社
ミシン
2か月前
株式会社鈴木製作所
ミシン
2か月前
JUKI株式会社
ミシン
2か月前
JUKI株式会社
情報端末
2か月前
株式会社PEGASUS
オーバーロックミシンのカッター装置
1か月前
株式会社ジャノメ
ミシン及びその制御方法
2か月前
ブラザー工業株式会社
縫製データ生成プログラム及びミシン
2か月前
株式会社ジャノメ
ミシン用押さえホルダ及びミシン
22日前
YKK株式会社
ミシンフット、及びそれを備えたミシン
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ