TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024110317
公報種別
公開特許公報(A)
公開日
2024-08-15
出願番号
2023014844
出願日
2023-02-02
発明の名称
縫製装置
出願人
ブラザー工業株式会社
代理人
個人
,
個人
主分類
D05B
65/02 20060101AFI20240807BHJP(縫製;刺しゅう;タフティング)
要約
【課題】従来よりも上糸及び下糸の長さの設定の自由度を向上した縫製装置を提供すること。
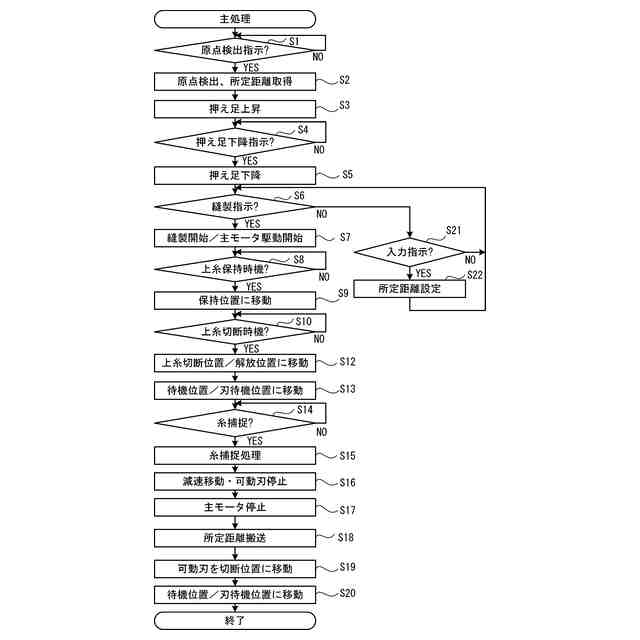
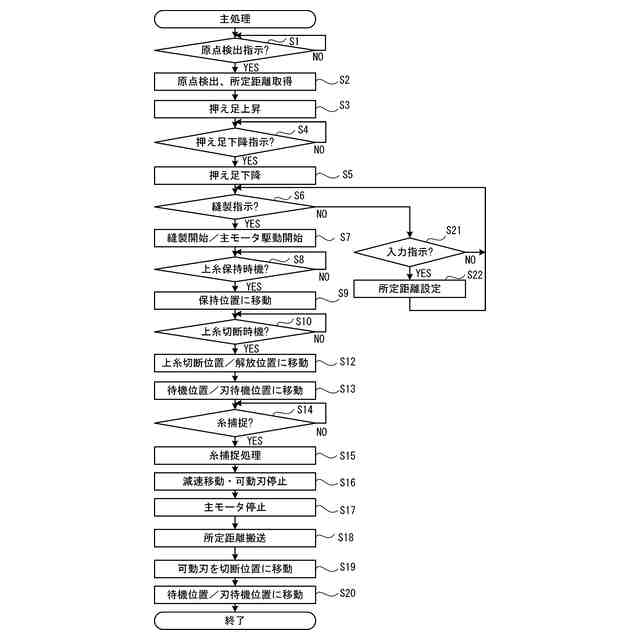
【解決手段】縫製装置の制御装置は、針棒機構及び搬送機構を駆動し、上糸及び下糸で縫製物に縫目を形成する(S7)。制御装置は、縫製物に縫製順序が最後の縫目を形成することに応じて、モータを駆動して、可動刃を、刃待機位置から上糸捕捉位置に移動し、更に、上糸捕捉位置に対して刃待機位置とは反対側の可動位置に移動する糸捕捉処理を行う(S15)。制御装置は、S15の糸捕捉処理により可動刃が上糸を捕捉した状態、且つ、縫針の下端が針板よりも上方に位置する条件で、搬送機構により縫製物を所定距離だけ搬送する(S18)。制御装置は、S18の処理後、モータを駆動して、可動刃が固定刃と交差する切断位置へ移動して上糸及び下糸を切断する(S19)。
【選択図】図9
特許請求の範囲
【請求項1】
下端に縫針を装着可能な針棒を有し、前記針棒を上下方向に揺動させる針棒機構と、
前記縫針を挿通する針穴が形成された針板と、
前記針棒機構に対して縫製物を相対的に少なくとも一方向に送る搬送機構と、
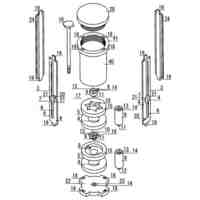
上糸及び下糸を切断可能な切断機構であって、
前記針板の下側に固定される固定刃と、
前記固定刃に対して水平方向に回動可能に設けた可動刃と、
モータを有し、前記モータの動力で前記可動刃を前記水平方向に回動する刃移動部 と
を有する前記切断機構と、
前記針棒機構、前記搬送機構、及び前記切断機構を制御する制御装置を備え、
前記制御装置は、
前記針棒機構及び前記搬送機構を駆動し、前記上糸及び前記下糸で前記縫製物に縫目を形成する縫製処理と、
前記縫製物に縫製順序が最後の縫目を形成することに応じて、前記モータを駆動して、前記可動刃を、前記可動刃が前記固定刃から前記水平方向で離れた位置にある刃待機位置から、前記可動刃が前記針穴近傍にある前記上糸を捕捉する上糸捕捉位置に移動し、更に、前記上糸捕捉位置に対して前記刃待機位置とは反対側の可動位置に移動する糸捕捉処理と、
前記糸捕捉処理により前記可動刃が前記上糸を捕捉した状態、且つ、前記縫針の下端が前記針板よりも上方に位置する条件で、前記搬送機構により前記縫製物を所定距離だけ搬送する長さ調整処理と、
前記長さ調整処理後、前記モータを駆動して、前記可動刃が前記固定刃と交差する切断位置へ移動して前記上糸及び前記下糸を切断する切断処理と
を実行することを特徴とする縫製装置。
続きを表示(約 1,200 文字)
【請求項2】
前記制御装置は、
前記糸捕捉処理での前記可動刃の移動速度よりも、前記可動位置から前記切断位置へ移動して前記上糸及び前記下糸を切断するまでの前記可動刃の移動速度が低くなるように前記モータを制御することを特徴とする請求項1に記載の縫製装置。
【請求項3】
前記切断位置は、前記可動位置と、前記刃待機位置との間に位置することを特徴とする請求項1に記載の縫製装置。
【請求項4】
前記制御装置は、
前記糸捕捉処理後、前記切断処理で前記上糸及び前記下糸を切断するまでの間に、前記モータを制御して、前記可動刃を前記可動位置と前記切断位置との間の停止位置で所定期間停止することを特徴とする請求項1に記載の縫製装置。
【請求項5】
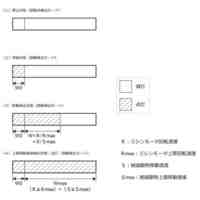
前記停止位置は、前記上糸及び前記下糸を切断する手前の位置であって、前記固定刃の刃部先端から前記可動刃の刃部先端迄の前記水平方向の距離が5mm以内となる前記位置であることを特徴とする請求項4に記載の縫製装置。
【請求項6】
入力部を備え、
前記制御装置は、
前記入力部から入力された前記所定距離を設定する距離設定処理を更に実行し、
前記長さ調整処理で、前記距離設定処理で設定された前記所定距離だけ前記縫製物を搬送することを特徴とする請求項1に記載の縫製装置。
【請求項7】
前記可動刃の回動中心は、前記針板と平行な面の前記モータから前記針穴へと向かう方向において、前記針穴に対し、前記モータ側とは反対側に設けられることを特徴とする請求項1に記載の縫製装置。
【請求項8】
前記モータの動力で駆動し、前記針板の下側で前記縫針に通された前記上糸の上糸端部を解除可能に保持する上糸保持機構を更に備えることを特徴とする請求項1に記載の縫製装置。
【請求項9】
前記上糸保持機構は、
前記針板の下面に設けられた第一保持部材と、
前記針板に支持部により回動可能に支持され、前記第一保持部材と協働して前記上糸端部を保持する第二保持部材と、
前記モータの動力で前記第二保持部材を前記水平方向に移動する保持移動部であって、
前記水平方向において、前記第一保持部材と前記第二保持部材との間に、前記針穴が配置された待機位置と、
前記水平方向において前記第二保持部材が前記針穴から離隔し、且つ、前記第二保持部材が前記第一保持部材と前記上下方向に重なる保持位置と
に前記第二保持部材を移動する前記保持移動部と
を有することを特徴とする請求項8に記載の縫製装置。
【請求項10】
前記支持部は、前記針板と平行な面の前記モータから前記針穴へと向かう方向において、前記針穴に対し、前記モータ側に設けられることを特徴とする請求項9に記載の縫製装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
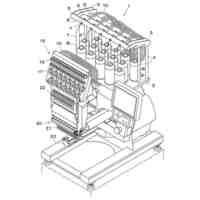
本発明は縫製装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
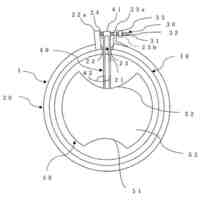
従来の縫製装置は、糸長さ調整機構、ガイド、及び切断部材をえる。切断部材は、針板の孔と切断部材との間における上糸及び下糸を切断する。糸長さ調整機構は、調整メス部を備える。調整メス部は、針板の孔と切断部材との間に配設され、上糸及び下糸を捕捉して移動することで、針板の孔から切断部材までの上糸及び下糸の長さを調整する。ガイド部は、針板の孔と調整メス部との間に配設され、調整メス部が移動する際に、上糸及び下糸をガイドする。ガイド部は、針板の孔と調整メス部とを直接結ぶ第一糸送り経路に対して、針板の孔、ガイド部及び調整メス部を結ぶ第二糸送り経路の長さを変えることができる。第一糸送り経路の長さは第二糸送り経路に比し長く設定されるので、縫製装置は、第一糸送り経路により得られる糸残量と同一の糸残量が調整メス部の少ない移動量により得られる。
【先行技術文献】
【特許文献】
【0003】
特開2021-115365号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の縫製装置では、上糸及び下糸の長さは調整メス部の移動可能量により制限される。
【0005】
本発明の目的は、従来よりも上糸及び下糸の長さの設定の自由度を向上した縫製装置を提供することである。
【課題を解決するための手段】
【0006】
本発明の請求項1の縫製装置は、下端に縫針を装着可能な針棒を有し、前記針棒を上下方向に揺動させる針棒機構と、前記縫針を挿通する針穴が形成された針板と、前記針棒機構に対して縫製物を相対的に少なくとも一方向に送る搬送機構と、上糸及び下糸を切断可能な切断機構であって、前記針板の下側に固定される固定刃と、前記固定刃に対して水平方向に回動可能に設けた可動刃と、モータを有し、前記モータの動力で前記可動刃を前記水平方向に回動する刃移動部とを有する前記切断機構と、前記針棒機構、前記搬送機構、及び前記切断機構を制御する制御装置を備え、前記制御装置は、前記針棒機構及び前記搬送機構を駆動し、前記上糸及び前記下糸で前記縫製物に縫目を形成する縫製処理と、前記縫製物に縫製順序が最後の縫目を形成することに応じて、前記モータを駆動して、前記可動刃を、前記可動刃が前記固定刃から前記水平方向で離れた位置にある刃待機位置から、前記可動刃が前記針穴近傍にある前記上糸を捕捉する上糸捕捉位置に移動し、更に、前記上糸捕捉位置に対して前記刃待機位置とは反対側の可動位置に移動する糸捕捉処理と、前記糸捕捉処理により前記可動刃が前記上糸を捕捉した状態、且つ、前記縫針の下端が前記針板よりも上方に位置する条件で、前記搬送機構により前記縫製物を所定距離だけ搬送する長さ調整処理と、前記長さ調整処理後、前記モータを駆動して、前記可動刃が前記固定刃と交差する切断位置へ移動して前記上糸及び前記下糸を切断する切断処理とを実行する。縫製装置は、長さ調整処理で、縫製物を所定距離搬送することで、縫製順序が最後の縫目からの上糸と下糸との長さを調整できる。縫製装置の長さ調整処理は、所定距離により上糸及び下糸の長さの自由度を向上することに貢献する。
【0007】
本発明の請求項2の縫製装置の前記制御装置は、前記糸捕捉処理での前記可動刃の移動速度よりも、前記可動位置から前記切断位置へ移動して前記上糸及び前記下糸を切断するまでの前記可動刃の移動速度が低くなるように前記モータを制御する。縫製装置は、糸捕捉処理での可動刃の移動速度よりも可動位置から切断位置へ移動して上糸及び下糸を切断するまでの可動刃の移動速度を遅らせることで、長さ調整処理を実行する時間を確保しやすい。
【0008】
本発明の請求項3の縫製装置の前記切断位置は、前記可動位置と、前記刃待機位置との間に位置する。縫製装置は、切断位置が回動位置と刃待機位置との間にない場合に比べ、縫製装置をコンパクトにできる。
【0009】
本発明の請求項4の縫製装置の前記制御装置は、前記糸捕捉処理後、前記切断処理で前記上糸及び前記下糸を切断するまでの間に、前記モータを制御して、前記可動刃を前記可動位置と前記切断位置との間の停止位置で所定期間停止する。縫製装置は、停止位置で停止しない場合に比べ、長さ調整処理で、縫製物を所定距離搬送するのに要する時間を確保しやすい。
【0010】
本発明の請求項5の縫製装置の前記停止位置は、前記上糸及び前記下糸を切断する手前の位置であって、前記固定刃の刃部先端から前記可動刃の刃部先端迄の前記水平方向の距離が5mm以内となる前記位置である。縫製装置は、固定刃の刃部先端から可動刃の刃部先端迄の水平方向の距離が5mmよりも大きい場合に比べ、切断処理で上糸及び下糸を適切に切断できる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
刺繍枠及び刺繍枠取付部材
2か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
ブラザー工業株式会社
ミシン
1か月前
ブラザー工業株式会社
ミシン
1か月前
ブラザー工業株式会社
縫製装置
1か月前
株式会社バルダン
刺繍ミシンの糸道装置
2日前
株式会社ジャノメ
ミシン用補助テーブル
17日前
個人
改良版3Dクイック・ソーイング・システム
13日前
JUKI株式会社
ミシン釜の給油装置
1か月前
株式会社PEGASUS
偏平縫いミシンの下糸切り装置
1か月前
株式会社ジャノメ
ミシン
3日前
株式会社鈴木製作所
ミシン
2か月前
JUKI株式会社
ミシン
2か月前
JUKI株式会社
ミシン
2か月前
JUKI株式会社
情報端末
2か月前
株式会社PEGASUS
オーバーロックミシンのカッター装置
1か月前
個人
上糸蓄糸‐繰り出し装置を含む上糸制御機構を有する本縫いミシン
11日前
株式会社鈴木製作所
ミシン用布押え部材
10日前
ブラザー工業株式会社
縫製データ生成プログラム及びミシン
2か月前
株式会社ジャノメ
ミシン用押さえホルダ及びミシン
1か月前
YKK株式会社
ミシンフット、及びそれを備えたミシン
1か月前
株式会社ジャノメ
ミシン及びミシンを制御する方法
2か月前
JUKI株式会社
ミシン管理システム及びミシン管理方法
2か月前
JUKI株式会社
ミシン管理システム及びミシン管理方法
2か月前
ブラザー工業株式会社
縫製システム、縫製データ送信プログラム、及びミシン
1か月前
JUKI株式会社
ミシン管理システム、ミシン管理方法、及び情報端末
2か月前
JUKI株式会社
情報端末、ミシン管理システム、及びミシン管理方法
2か月前
インティヴァ プロダクツ, エルエルシー
ミシン
3か月前
アローヘッド ファーマシューティカルズ インコーポレイテッド
B型肝炎ウイルス感染のためのRNAi薬
1か月前
キッコーマン株式会社
グルコースデヒドロゲナーゼを用いた持続血糖測定
2か月前
他の特許を見る








 特許ウォッチ
特許ウォッチ