TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024122131
公報種別
公開特許公報(A)
公開日
2024-09-09
出願番号
2023029498
出願日
2023-02-28
発明の名称
ミシン
出願人
JUKI株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
D05B
29/02 20060101AFI20240902BHJP(縫製;刺しゅう;タフティング)
要約
【課題】ミシンの大型化及び高コスト化を抑制すること。
【解決手段】ミシンは、ミシンモータと、調整モータと、ミシン針を保持する針棒と、針棒の下方において縫製対象物を下方から支持する針板と、針板に支持される縫製対象物を上方から押さえる押さえと、押さえを下方に移動させる弾性力を発生する押さえばねと、針板に支持される縫製対象物を送る送り歯と、ミシンモータが発生した動力に基づいて、針棒を上下方向に往復移動させる針棒駆動機構と、送り歯を水平方向に往復移動させる水平送り機構と、を含むミシン動力伝達機構と、調整モータが発生した動力に基づいて、押さえを上昇させる押さえ上げ機構と、調整モータが発生した動力に基づいて、送り歯の水平方向の振幅を調整するピッチ調整機構と、を備える。
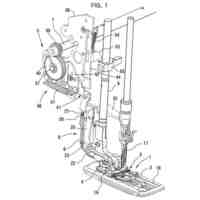
【選択図】図11
特許請求の範囲
【請求項1】
ミシンモータと、
調整モータと、
ミシン針を保持する針棒と、
前記針棒の下方において縫製対象物を下方から支持する針板と、
前記針板に支持される前記縫製対象物を上方から押さえる押さえと、
前記押さえを下方に移動させる弾性力を発生する押さえばねと、
前記針板に支持される前記縫製対象物を送る送り歯と、
前記ミシンモータが発生した動力に基づいて、前記針棒を上下方向に往復移動させる針棒駆動機構と、前記送り歯を水平方向に往復移動させる水平送り機構と、を含むミシン動力伝達機構と、
前記調整モータが発生した動力に基づいて、前記押さえを上昇させる押さえ上げ機構と、
前記調整モータが発生した動力に基づいて、前記送り歯の水平方向の振幅を調整するピッチ調整機構と、を備える、
ミシン。
続きを表示(約 1,000 文字)
【請求項2】
前記押さえ上げ機構は、
前記調整モータの出力シャフトに固定される押さえカムと、
前記押さえに固定される押さえ棒と、
前記押さえカムと前記押さえ棒とを連結する押さえリンク機構と、を有し、
前記押さえカムの回動により、前記押さえが上昇する、
請求項1に記載のミシン。
【請求項3】
前記ピッチ調整機構は、
前記調整モータの出力シャフトに固定されるピッチ調整アームと、
前記ピッチ調整アームに連結されるピッチ調整ロッドと、
前記ピッチ調整ロッドを介して前記ピッチ調整アームに連結されるピッチ調整体と、を有し、
前記ピッチ調整体の回動により、前記振幅が調整される、
請求項1に記載のミシン。
【請求項4】
前記押さえ上げ機構及び前記ピッチ調整機構のそれぞれは、前記調整モータの出力シャフトに接続され、
前記出力シャフトの第1回動範囲において、前記振幅が調整され、
前記出力シャフトの第2回動範囲において、前記押さえが上昇する、
請求項1に記載のミシン。
【請求項5】
前記押さえ上げ機構は、
前記調整モータの出力シャフトに固定される押さえカムと、
前記押さえに固定される押さえ棒と、
前記押さえカムと前記押さえ棒とを連結する押さえリンク機構と、を有し、
前記押さえカムの回動により、前記押さえが上昇し、
前記ピッチ調整機構は、
前記調整モータの出力シャフトに固定されるピッチ調整アームと、
前記ピッチ調整アームに連結されるピッチ調整ロッドと、
前記ピッチ調整ロッドを介して前記ピッチ調整アームに連結されるピッチ調整体と、を有し、
前記ピッチ調整体の回動により、前記振幅が調整され、
前記出力シャフトの第1回動範囲において、前記振幅が調整され、
前記出力シャフトの第2回動範囲において、前記押さえが上昇する、
請求項1に記載のミシン。
【請求項6】
前記出力シャフトの第1回動範囲において、前記押さえは上昇しない、
請求項5に記載のミシン。
【請求項7】
前記ミシンモータが駆動している状態で、前記出力シャフトが第1回動範囲において回動するように前記調整モータを駆動して、前記送り歯の送り軌道を変更するコントローラを備える、
請求項6に記載のミシン。
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、ミシンに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
ミシンに係る技術分野において、特許文献1に開示されているような、送り歯を有するミシンが知られている。また、特許文献2に開示されているような、布押さえを上昇させる押さえ上げ装置を有するミシンが知られている。
【先行技術文献】
【特許文献】
【0003】
特開2019-055108号公報
特開2011-092523号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来においては、送り歯の振幅を調整するためのモータと押さえを上昇させるためのモータとがミシンに別々に設けられていた。モータの数が多いと、ミシンが大型化したり高コスト化したりする可能性がある。
【0005】
本明細書で開示する技術は、ミシンの大型化及び高コスト化を抑制することを目的とする。
【課題を解決するための手段】
【0006】
本明細書は、ミシンモータと、調整モータと、ミシン針を保持する針棒と、針棒の下方において縫製対象物を下方から支持する針板と、針板に支持される縫製対象物を上方から押さえる押さえと、押さえを下方に移動させる弾性力を発生する押さえばねと、針板に支持される縫製対象物を送る送り歯と、ミシンモータが発生した動力に基づいて、針棒を上下方向に往復移動させる針棒駆動機構と、送り歯を水平方向に往復移動させる水平送り機構と、を含むミシン動力伝達機構と、調整モータが発生した動力に基づいて、押さえを上昇させる押さえ上げ機構と、調整モータが発生した動力に基づいて、送り歯の水平方向の振幅を調整するピッチ調整機構と、を備える、ミシンを開示する。
【発明の効果】
【0007】
本明細書で開示する技術によれば、ミシンの大型化及び高コスト化が抑制される。
【図面の簡単な説明】
【0008】
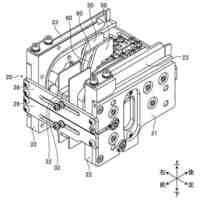
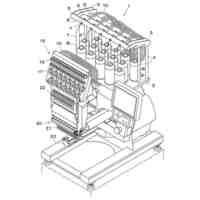
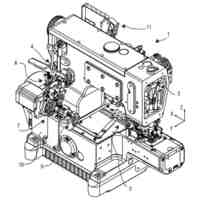
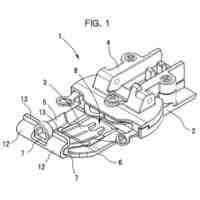
図1は、実施形態に係るミシンを示す左上後方からの斜視図である。
図2は、実施形態に係るミシンフレームの内部を示す左上後方からの斜視図である。
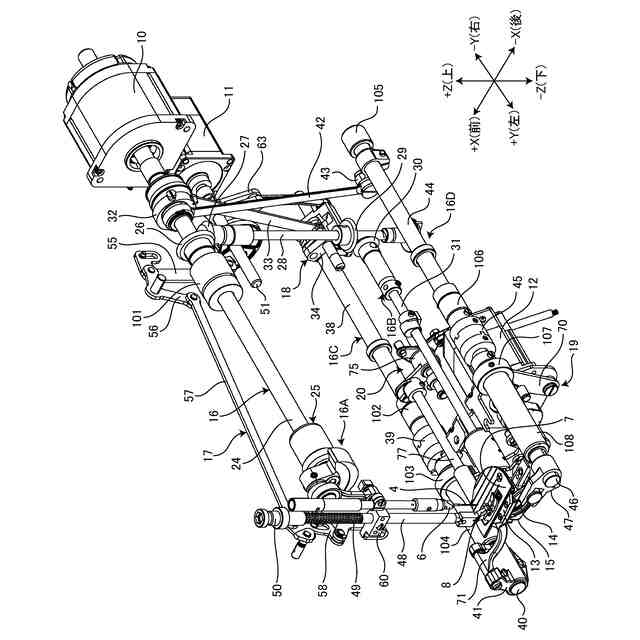
図3は、実施形態に係るミシンフレームの内部を示す右上前方からの斜視図である。
図4は、実施形態に係るミシンフレームの内部を後方から見た図である。
図5は、実施形態に係るミシンフレームの内部を前方から見た図である。
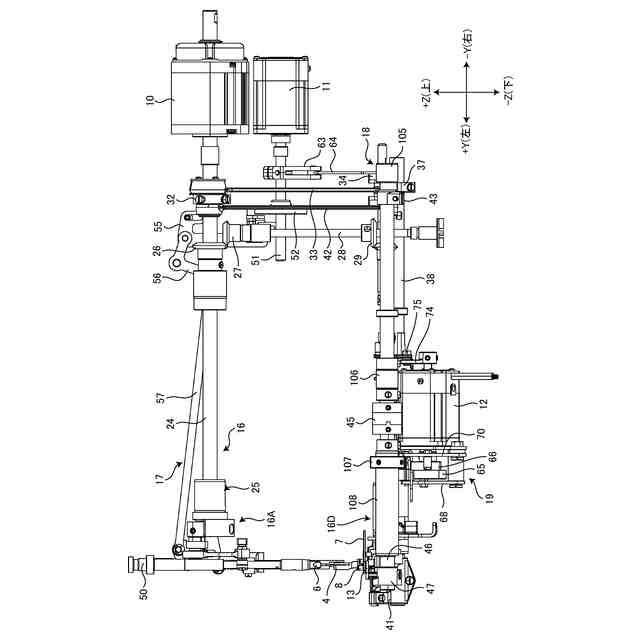
図6は、実施形態に係るミシンフレームの内部を左方から見た図である。
図7は、実施形態に係るミシンフレームの内部を右方から見た図である。
図8は、実施形態に係るミシンフレームの内部を上方から見た図である。
図9は、実施形態に係るミシンフレームの内部を下方から見た図である。
図10は、実施形態に係るミシンを示すブロック図である。
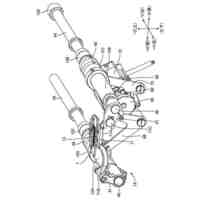
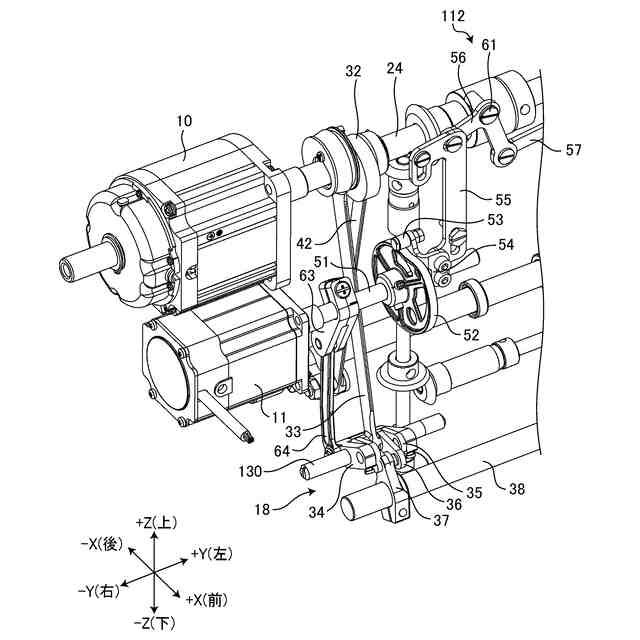
図11は、実施形態に係るミシンフレームの内部の一部を示す右上前方からの斜視図である。
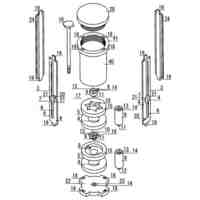
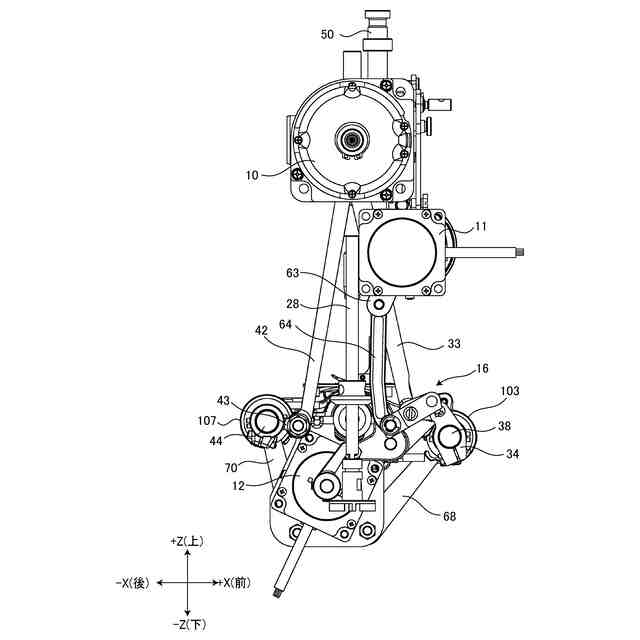
図12は、実施形態に係る偏心カムを示す右上前方からの斜視図である。
図13は、実施形態に係る偏心カムを示す左上後方からの斜視図である。
図14は、実施形態に係るピッチ調整機構を示す右上前方からの斜視図である。
図15は、実施形態に係る第1調整モータの動作を説明するための図である。
図16は、実施形態に係る送り歯調整機構を示す左上後方からの斜視図である。
図17は、実施形態に係る送り歯調整機構を左方から見た図である。
図18は、実施形態に係る送り歯調整機構を示す断面図である。
図19は、実施形態に係る送り歯の動作を模式的に示す図である。
図20は、実施形態に係る送り歯の動作を模式的に示す図である。
図21は、実施形態に係る糸切り機構を示す右上前方からの斜視図である。
図22は、実施形態に係る糸切り機構を右方から見た図である。
図23は、実施形態に係る糸切り機構を示す左上後方からの斜視図である。
図24は、実施形態に係る第2調整モータの動作を説明するための図である。
図25は、他の実施形態に係る押さえ上げ機構を示す図である。
【発明を実施するための形態】
【0009】
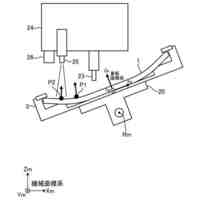
以下、実施形態について図面を参照しながら説明する。実施形態においては、XYZ直交座標系を設定し、このXYZ直交座標系を参照しつつ各部の位置関係について説明する。所定面内のX軸と平行な方向をX軸方向とする。X軸と直交する所定面内のY軸と平行な方向をY軸方向とする。所定面と直交するZ軸と平行な方向をZ軸方向とする。また、X軸を中心とする回転方向又は傾斜方向をθX方向とする。Y軸を中心とする回転方向又は傾斜方向をθY方向とする。Z軸を中心とする回転方向又は傾斜方向をθZ方向とする。また、X軸及びY軸を含む平面を適宜、XY平面、と称する。X軸及びZ軸を含む平面を適宜、XZ平面、と称する。Y軸及びZ軸を含む平面を適宜、YZ平面、と称する。XY平面は、所定面と平行である。XY平面とXZ平面とYZ平面とは直交する。
【0010】
実施形態においては、XY平面と水平面とが平行であることとする。X軸方向は、前後方向である。Y軸方向は、左右方向である。Z軸方向は、上下方向である。+X方向は、前方向であり、-X方向は、後方向である。+Y方向は、左方向であり、-Y方向は、右方向である。+Z方向は、上方向であり、-Z方向は、下方向である。なお、XY平面が水平面に対して傾斜してもよい。水平方向は、前後方向及び左右方向を含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン釜の給油装置
1か月前
JUKI株式会社
マウントデータ作成方法
2か月前
JUKI株式会社
フィーダ及び部品実装装置
25日前
JUKI株式会社
部品実装装置及び部品実装方法
23日前
JUKI株式会社
ミシン管理システム及びミシン管理方法
2か月前
JUKI株式会社
実装装置、実装方法、及び電子デバイスの製造方法
23日前
JUKI株式会社
実装装置、実装方法、及び電子デバイスの製造方法
23日前
JUKI株式会社
実装装置、実装方法、及び電子デバイスの製造方法
23日前
JUKI株式会社
実装装置、実装方法、及び電子デバイスの製造方法
23日前
JUKI株式会社
情報端末、ミシン管理システム、及びミシン管理方法
2か月前
JUKI株式会社
パレット、生産システム、及び電子デバイスの製造方法
23日前
個人
刺繍枠及び刺繍枠取付部材
2か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
ブラザー工業株式会社
ミシン
1か月前
ブラザー工業株式会社
ミシン
1か月前
ブラザー工業株式会社
縫製装置
3か月前
ブラザー工業株式会社
縫製装置
1か月前
株式会社バルダン
刺繍ミシンの糸道装置
2日前
株式会社ジャノメ
ミシン用補助テーブル
17日前
個人
改良版3Dクイック・ソーイング・システム
13日前
JUKI株式会社
ミシン釜の給油装置
1か月前
株式会社PEGASUS
偏平縫いミシンの下糸切り装置
1か月前
株式会社PEGASUS
サージングミシンの生地ガイド
4か月前
株式会社ジャノメ
ミシン
3日前
株式会社鈴木製作所
ミシン
2か月前
JUKI株式会社
ミシン
2か月前
JUKI株式会社
ミシン
2か月前
JUKI株式会社
情報端末
2か月前
株式会社PEGASUS
オーバーロックミシンのカッター装置
1か月前
株式会社ジャノメ
ミシン及びその制御方法
3か月前
株式会社鈴木製作所
ミシン用布押え部材
10日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ